一种自走式高空坠物拦截装置的制作方法
1.本发明涉及安防监控领域,尤其涉及一种自走式高空坠物拦截装置。
背景技术:
2.高空坠物现象被称为“悬在城市上空的痛”。近年来,高空坠物致人伤亡的案例不断见诸报端,该类顽疾的久治不愈拷问着城市管理,也拷问着立法部门,事后赔偿、追责问题能否妥善处理也给法院审判执行工作带来不小挑战。
3.在一些居民楼尤其是老旧小区的阳台,堆砌杂物、盆栽,甚至悬挂拖把等现象屡见不鲜,甚至有些空调外挂机上都堆有放着随时有坠落风险的杂物。这些安全隐患随时都可能转化为一起伤人事件。记者粗略梳理相关报道发现,2017年6月以来,仅媒体公开报道的重庆高空坠物事件就多达数十起。而且如今城市居民小区和沿街建筑物大都是二三十层的高楼,高空抛物是民众比较担忧的事。如何防范高空抛物、坠物,保护民众的生命健康安全,值得高度重视。然而,由于高空抛物具有随机性,如何防范突发的高空抛物行为,因高空坠物造成伤亡事件后,如何准确定位和确定责任人,一直是城市管理中的难题。
4.在我国,针对高空抛物现象有着相关法律约束。我国《侵权责任法》规定,从建筑物中抛掷物品或者从建筑物上坠落的物品给他人造成损害,难以确定具体侵权人的,除能够证明自己不是侵权人外,由可能加害的建筑物使用人给予补偿。也就是说,一旦高空抛物造成人员伤亡,如果没有目击证人或监控视频作为证据,很难精确“锁定”责任住户。一栋楼的所有住户都有可能要承担赔偿责任。这对受牵连的无辜住户来说,显然是不公平的。为防范高空抛物行为,很多城市采取了一些措施。据报道,浙江省杭州市余杭区有一个小区,安装了47个“防高空抛物监控”,这些广角摄像头安装在每幢楼南北两侧的地面立杆上,距离单元楼10米左右,呈60至80度角仰拍,正好可以将整幢楼的窗户和阳台纳入拍摄范围,取得了很好地防止高空抛物效果。试想,在47个朝天安装的摄像头监控下,住户“一伸手就被捉”,谁还敢高空抛物;即便发生了高空抛物造成他人损害,监控视频上一清二楚,能精准“锁定”责任住户。这样一来,“摄像头朝天”确实能形成强大的约束力,并且在防盗方面也能发挥一定的作用。但是,“摄像头朝天”无疑会涉及到住户隐私的问题,在安装时就要避免拍摄到住户隐私;同时,对视频数据则要严加管控,防止涉及住户隐私的视频外流造成侵权和不良社会影响。
5.另外,现有的防范高空坠落的方法多为提前警示,即发现高空坠物,及时警示行人避让,以避免造成人身危险。但这种方法,至少具有以下几个缺点:1、极大的依赖行人的反应能力,若行人得到警示无法迅速做出避让反应,仍有造成人身危险的风险,2、得到警示的行人在避让的过程中,无法准确且统一地往安全方向避让,在慌乱避让的过程中,仍有造成人身危险的风险。
6.因此亟需一种高空坠物的拦截装置,可以在高空坠物下落的过程中进行拦截,避免坠落至行人之中造成人身危险。
技术实现要素:
7.本发明克服了现有技术的不足,提供一种自走式高空坠物拦截装置。
8.为达到上述目的,本发明采用的技术方案为:移动组件、底座、第一转动机构、第二转动机构和发射机构,
9.其中,所述第一转动机构设置在所述底座上,所述第二转动机构设置在所第一转动机构上,所述第一转动机构的转动平面与所述第二转动机构的转动平面相互垂直,所述第一转动机构以及第二转动机构上均设置有用于感应转动角度的感应件;
10.所述移动组件包括设置在底座底部的的多个滚轮组、滑轴和自走电机,所述滚轮组至少包括一上一下夹持所述滑轴的两个滚轮,所述自走电机与其中一个所述滚轮组的一个所述滚轮连接并驱动其转动;
11.所述发射机构设置在所述第二转动机构上,所述发射机构包括发射筒和发射组件,所述发射筒的一端封闭,所述发射筒内设置有推动块,所述推动块与所述发射组件连接并可由所述发射组件带动沿所述发射筒轴向移动。
12.进一步的技术方案还可以是,所述滚轮截面有与所述滑轴相配合的内凹圆弧。
13.进一步的技术方案还可以是,所述滚轮表面设置有橡胶层。
14.进一步的技术方案还可以是,还包括锁紧电机,所述锁紧电机与其中一个所述滚轮组的一个所述滚轮连接,所述锁紧电机的转动方向与所述自走电机的转动方向相反。
15.进一步的技术方案还可以是,还包括感应部,所述感应部用于感应拦截体的位置。
16.进一步的技术方案还可以是,所述发射筒设置有摄像头,所述摄像头对图像信息进行采集。
17.进一步的技术方案还可以是,所述发射筒设置有用于放入所述拦截体的进料口。
18.进一步的技术方案还可以是,所述进料口设置在所述发射筒的上部。
19.进一步的技术方案还可以是,所述推动块朝向所述拦截体的一面呈内凹圆弧面。
20.进一步的技术方案还可以是,所述的推动块边缘圆周均匀设置有多个导向轮,所述导向轮与所述发射筒的内壁相切。
21.本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
22.(1)利用物联网技术,根据高空坠物的下落轨迹,调整所述第一转动机构和/或第二转动机构以调整所述发射筒的发射角度和发射方向,通过发射拦截体撞击高空坠物以改变高空坠物的下落轨迹,进而改变高空坠物的下落位置,避免高空坠物落入至行人之中,造成人身危险,且通过移动组件的设置,可以根据实际情况调节发射位置,一方面可以为拦截体的发射提供更多可发射的角度,可以根据实际需要进行调整,以提高发射准确度以及有效地控制拦截体撞击高空坠物的位置进而更加有效地控制高空坠物的跌落位置。
23.(2)设置有用于感应拦截体位置的感应部,当所述感应部感应到拦截体位于待发射位置,所述发射组件带动推动块进而推动拦截体沿所述发射筒移动进行发射,避免拦截体未到待发射位置,而发射组件开始发射动作的情况发生,提高拦截体发射的精确度。
24.(3)通过所述导向轮的设置,一方面支撑所述推动块在所述发射筒内的移动,提高所述推动块移动的稳定性,且多个导向轮圆周均匀设置在所述推动块的边缘,导向所述推动块的移动,有利于保证所述推动块的移动路径与所述发射筒轴线同轴,以提高拦截体发射的精确度。
附图说明
25.下面结合附图和实施例对本发明进一步说明。
26.图1为本发明实施例的结构示意图;
27.图2为本发明实施例的另一结构示意图;
28.图3为本发明另一实施例的结构示意图;
29.图4为本发明实施例的又一结构示意图;
30.图5为本发明实施例的另一结构示意图。
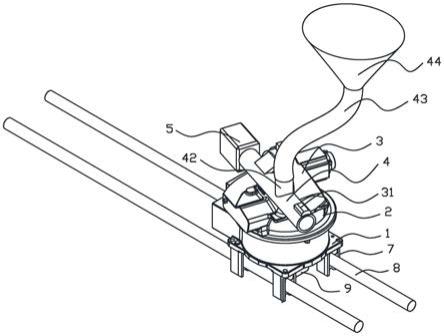
31.图中:1底座、2第一转动机构、3第二转动机构、4发射筒、41摄像头、42进料连接件、43进料管、44进料斗、5发射组件、6推动件、61导向轮、62内凹圆弧面、63伸缩杆、7滚轮组、8滑轴、9自走电机、10锁紧电机。
具体实施方式
32.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
33.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
34.在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
35.在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本申请中的具体含义。
36.如图1所示,本发明公开了一种自走式高空坠物拦截装置,包括:移动组件、底座1、第一转动机构2、第二转动机构3和发射机构,所述发射机构包括所述发射机构包括发射筒4和发射组件5。
37.其中,所述第一转动机构2设置在所述底座1上,所述第二转动机构3设置在所第一转动机构2上,所述第一转动机构2的转动平面与所述第二转动机构3的转动平面相互垂直,所述第一转动机构2以及第二转动机构3上均设置有用于感应转动角度的感应件,所述发射筒4设置在所述第二转动机构3上。
38.需要说明的是,所述感应件用于感应所述第一转动机构2和所述第二转动机构3的转动角度,便于监控所述第一转动机构2以及第二转动机构3的角度,以精准控制。另外,所述第一转动机构2和所述第二转动机构3的结构类似,这里仅以所述第一转动机构2为例作为说明。在该实施例中,所述第一转动机构包括转动座,所述转动座上设置有转动轴,所述转动轴插入所述底座上,使得所述转动座可以以所述转动轴为中轴相对于所述底座转动,所述底座上设置有齿环,所述齿环与所述转动轴转动,所述底座上设置有伺服电机,所述伺服电机的转动轴设置有于所述齿环配合的齿轮,当所述伺服电机驱动所述齿轮转动时,通过齿轮与所述齿环的配合,使得所述转动座以所述转动轴为中轴相对于所述底座转动。
39.需要说明的是,所述第一转动机构2可以带动所述第二转动机构3转动,所述第二转动机构3可以带动所述发射机构转动,且所述第一转动机构2和所述第二转动机构3的转动平面相互垂直,这样使得所述发射机构可以通过调整所述第一转动机构2和/或第二转动机构3以在三维空间内任意转动以调整发射筒4的发射角度和发射方向。
40.如图2所示,所述移动组件包括设置在底座1底部的的多个滚轮组7、滑轴8和自走电机9,所述滚轮组7至少包括一上一下夹持所述滑轴8的两个滚轮,所述自走电机9与其中一个所述滚轮组7的一个所述滚轮连接并驱动其转动。
41.需要说明的是,所述滑轴8用于为所述底座1的移动提供移动路径,所述滚轮组7通过两个所述滚轮从以上一下两个方向夹持所述滑轴8,导向所述底座1的移动,还限制了所述底座1相对于所述滑轴8的径向移动,有利于所述底座1相对于所述滑轴8平稳移动。另外,所述滑轴8至少包括平行设置的两根,且两端通过固定件固定在地面或其他安装位置上。在该实施例中,所述滑轴8可以设置在高楼下方平台上。另一个优选的实施例中,所述滑轴8可以设置在高楼下方平台上并向楼外延伸出来,另外,所述滑轴8还可以设置在高楼外的空旷地面上。
42.如图1所示,所述发射机构设置在所述第二转动机构3上,所述发射机构包括发射筒4和发射组件5,所述发射筒4的一端封闭,所述发射筒4内设置有推动块6,所述推动块6与所述发射组件5连接并可由所述发射组件5带动沿所述发射筒4轴向移动,所述推动块6设置有用于感应拦截体位置的感应部。
43.需要说明的是,所述推动块6设置有用于感应拦截体位置的感应部,当所述感应部感应到拦截体位于待发射位置,所述发射组件5带动推动块6进而推动拦截体沿所述发射筒4移动进行发射,避免拦截体未到待发射位置而发射组件5开始发射的情况发生,提高拦截体发射的精确度。在另一个实施例中,所述感应部还可以设置在所述发射筒4内。另外,在该实施例中,所述拦截体的形状为球形。
44.在另一个实施例中,所述感应部还可以用于感应拦截体的种类,该自走式高空坠物拦截装置可以根据所述拦截体的种类,调整发射角度、发射方向和发射力度,以适应不同情况。在实际使用过程中,拦截体的种类可以包括不同材质、不同重量等。
45.另外,如图2所示,所述滚轮截面有与所述滑轴8相配合的内凹圆弧。这样,以上一下的两个滚轮配合夹持所述滑轴8,能够更好的将所述底座安装在所述滑轴8上,且限制所述底座相对于所述滑轴8的径向移动;另外,由于所述滚轮截面有内凹圆弧,这样,滚轮与所述滑轴8的接触面积更大,更能有效地支撑所述底座1,而且,接触面积大,所述滚轮与所述滑轴8的摩擦力大,更有利于所述自走电机9带动滚轮转动进而带动所述底座在所述滑轴8
上移动。
46.在另一个更加优选的实施例中,如图2所示,为了增加所述滚轮与所述滑轴8之间的摩擦力,且避免所述底座相对于所述滑轴8出现非正常移动,导致位置偏移进而影响所述发射筒的发射精度,所述滚轮表面设置有橡胶层。
47.具体地,还包括锁紧电机10,所述锁紧电机10与其中一个所述滚轮组7的一个所述滚轮连接,所述锁紧电机10的转动方向与所述自走电机9的转动方向相反。当所述自走电机9驱动所述滚轮转动进而带动所述底座1移动至设定位置后,所述锁紧电机10相对于所述自走电机9反向转动,进而带动相对应的所述滚轮反向转动并与由所述自走电机9驱动的正向转动的所述滚轮相配合,使得所述底座1的移动状态被终止并被锁定在设定位置上,这样能够避免移动状态下的所述底座1在惯性的作用下偏离设定位置,影响所述发射筒4的发射精度,且能够更加精准地控制所述底座1在所述滑轴8上的移动。
48.如图1所示,所述发射筒4设置有摄像头41,所述摄像头41对图像信息进行采集。
49.需要说明的是,所述摄像头41对图像信息进行采集,所述摄像头41采集的图像信息可以用于纠正发射角度和发射方向。在另一个实施例中,所述发射筒上还设置有红外传感器、人体传感器、热感传感器等的一种或多种,用于对发射筒面前环境进行扫描识别,获取发射筒前面的环境信息,一方面可以用于纠正发射角度和发射方向,另一方面可以避免发射筒发射时,前方存在行人、飞鸟、动物等障碍物,造成误伤或阻碍发射。应当说明是的,所述摄像头41、所述红外传感器、所述人体传感器、所述热感传感器等用于识别环境的传感器,不仅仅限于设置在所述发射筒上用于扫面识别发射筒4前方的环境,还可以设置在所述底座1或其他位置上用于识别该自走式高空坠物拦截装置的周边环境,这样在需要发射拦截体进行拦截高空坠物时,能够及时识别出周边环境,并可根据高空坠物的实际情况以及周边环境的实际情况,得出最佳射击角度和射击方向;另外,还可以设置有警示灯或/和警示喇叭,当识别到周边存在行人等时,及时发出警示,避免误伤。
50.在该实施例中,发射组件5可以采用气缸,如图5所示,气缸的伸缩杆63与所述推动块6连接,利用气缸带动所述推动块6移动。实际上,所述发射组件5并不仅限于气缸,还可以采用弹簧发射、电磁发射、压缩气体发射等方法。该自走式高空坠物拦截装置,利用物联网技术,根据高空坠物的下落轨迹,调整所述第一转动机构2和/或第二转动机构3以调整所述发射筒4的发射角度和发射方向,通过发射拦截体撞击高空坠物以改变高空坠物的下落轨迹,进而改变高空坠物的下落位置,避免高空坠物落入至行人之中,造成人身危险。具体地,可以通过发射拦截体撞击高空坠物使得其落入至无人区域。
51.另一个优选的实施例中,所述底座1上设置有控制器,所述控制器分别与所述第一转动机构2和第二转动机构3电连接,所述控制器能够控制所述第一转动机构2和所述第二转动机构3按预定方式运动。
52.需要说明的是,在该实施例中,所述控制器用于控制所述第一转动机构2和所述第二转动机构3的转动以调整所述发射筒5的发射角度和发射方向,还可以用于控制发射组件5发射拦截体。
53.具体地,如图1和图2所示,所述发射筒4上设置有连通所述发射筒4内部空间的进料连接件42,所述发射筒4通过所述进料连接件42与进料管43连接。这样,拦截体可以通过所述进料管43进入所述发射筒4。因此,所述进料管43和所述进料连接件42的内孔尺寸应当
与拦截体的尺寸相适应。
54.需要说明的是,所述进料连接件42和所述进料管43是用于向所述发射筒4内放入拦截体,所述进料连接件42和和所述进料管43的可以是一体设置也可以是分体设置。
55.具体地,所述进料连接件42不突出于所述发射筒4的内壁,且与所述发射筒4的连接处圆滑过渡。这样,一方面,便于拦截体进入发射筒4,另一方面,避免影响拦截体在所述发射筒4内的移动。
56.另一个优选的实施例中,所述进料管43可相对于所述进料连接件42轴向转动。这样,当调整所述第一转动机构2和/或第二转动机构3以调整所述发射筒4的发射角度和发射方向时,所述进料管43不会影响到所述发射筒4的转动,且不会影响到拦截体从所述进料管43进入所述发射筒4内。
57.具体地,所述进料管43可以为s型,但不局限于s型,还可以是c型等,其目的在于,弯曲的所述进料管43在不影响拦截体在所述进料管43内的移动的前提下,可以在所述发射筒4转动的过程中提供伸展的余量,一方面,不会影响拦截体从所述进料管43进入所述发射筒4,另一方面,不会影响发射筒4的转动。
58.具体地,还包括进料斗44,所述进料斗44通过支架设置在所述底座1的一侧,所述进料斗44悬空在所述发射筒4的上方,所述进料斗44的底部与所述进料管43连接。其中,所述进料斗44用于存放拦截体,存放在其中的拦截体可以从所述进料斗44的底部通过所述进料管43移动至所述发射筒4内,另外,独立设置的进料斗44不会随所述发射筒4转动而移动,可以降低对所述第一转动机构2和/或第二转动机构3的运转负荷。
59.具体地,为了便于拦截体进入且不会影响拦截体在所述发射筒4内的移动,所述进料连接件设置在所述发射筒4的上部。
60.另一个更加优选的实施例中,所述推动块6朝向所述拦截体的一面呈内凹圆弧面。所述推动块6朝向所述拦截体的一面呈内凹圆弧面62,有利于加大所述推动块6与拦截体的接触面积,且内凹圆弧面62有利于所述推动块6能够有效地作用在拦截体的重心上,以提高拦截体发射的精确度。
61.在另一个优选的实施例中,如图3
‑
5所示,所述的推动块6边缘圆周均匀设置有多个导向轮61,所述导向轮61与所述发射筒4的内壁相切。通过所述导向轮61的设置,一方面支撑所述推动块6在所述发射筒4内的移动,提高所述推动块6移动的稳定性,且多个导向轮61圆周均匀设置在所述推动块6的边缘,导向所述推动块6的移动,有利于保证所述推动块6的移动路径与所述发射筒4轴线同轴,以提高拦截体发射的精确度。
62.以上依据本发明的理想实施例为启示,通过上述的说明内容,相关人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1