一种可升降的双激光模拟全向射击装置的制作方法
[0001]
本实用新型涉及激光模拟射击及系统,特别是一种可升降的双激光模拟全向射击装置及其控制系统。
背景技术:
[0002]
随着社会的发展,部队训练越来越数字化,智能化,为服务军人训练发展出来的激光模拟对抗系统,是安全、可靠、实用的。在数字化演习当中,激光反击装置是重要的互动设备,能够显著的提高部队训练质量。现有的模拟反击装置一般有效使用范围是大于400米,但是在实际应用中,存在近距离射击的问题,比如士兵突进到50米的情况,在近距离使用中,现有技术的激光光斑会减小,随着距离的缩小,光斑会越来越小,造成无法命中的问题。同时,现有反击装置只能够在平面的360
°
范围进行攻击,无法改变激光光源的海拔高度。
技术实现要素:
[0003]
为了解决现有技术中的不足,本实用新型提供一种双激光探头,一个长焦激光探头,一个短焦激光探头,解决了近距离激光模拟射击的盲点问题。同时,在360
°
云台基座的基础上增加了升降的功能,使得激光模拟攻击自由度更高,更加智能。
[0004]
为达到上述目的,本实用新型采用的技术方案为:
[0005]
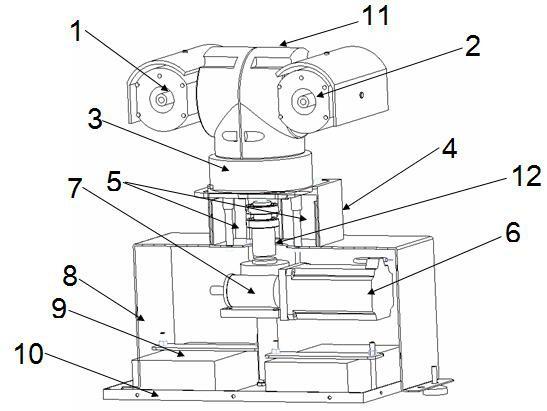
一种可升降的双激光模拟全向射击装置,包括步进电机(6)和减速机构(7),其特征在于,步进电机(6)和减速机构(7)固定于主壳(8)内部;减速机构(7)的主轴(12)与云台支承罩(4)连接;导柱导套(5)中的导套固定到所述云台支承罩(4)上,导柱固定到主壳(8)上;云台支承罩(4)上固定云台(3),云台(3)的活动头部(11)两边分别固定长焦激光探头(1)和短焦激光探头(2);主壳(8)下方固定底座(10),控制单元(9)固定在底座(10)上。
[0006]
在一种实施方式中,长焦激光探头(1)的攻击范围为50-400米,短焦激光探头(2)的攻击范围为0-50米。
[0007]
在一种实施方式中,云台(3)在接收控制单元(9)的命令后实现自我360度旋转及活动头部(11)的俯仰角调整。
[0008]
在一种实施方式中,步进电机(6)在接收控制单元(9)的命令后通过减速机构(7)的主轴(12)可产生上下运动,该减速机构(7)的主轴(12)与云台支承罩(4)连接并带动云台(3)做上升或下降运动。
[0009]
进一步地,控制单元(9)采用微控制器做中央处理器,与外部通信,并通过pwm信号调制控制双通道激光驱动,通过通讯接口控制云台驱动。
[0010]
更进一步地,双通道激光驱动采用脉冲驱动方式,加载激光器id信息,武器类型,弹药量,攻击距离等信息,控制长焦激光探头(1)和短焦激光探头(2)的切换。
[0011]
本实用新型与现有技术相比,具有以下优点:
[0012]
1.本实用新型提供双激光探头,一个长焦激光探头,一个短焦激光探头,解决了近距离激光模拟射击的盲点问题。
[0013]
2.本实用新型在360度旋转云台基础上增加了升降的功能,使得激光模拟攻击自由度更高,更加智能。
附图说明
[0014]
图1为本实用新型一种可升降的双激光模拟全向射击装置的结构示意图
[0015]
图2为本实用新型一种可升降的双激光模拟全向射击装置系统的硬件控制示意图
[0016]
附图标记说明:
[0017]
(1)为长焦激光探头;
[0018]
(2)为短焦激光探头;
[0019]
(3)为云台;
[0020]
(4)为云台支承罩;
[0021]
(5)为导柱导套;
[0022]
(6)为步进电机;
[0023]
(7)为减速机构;
[0024]
(8)为主壳;
[0025]
(9)为控制单元;
[0026]
(10)为底座;
[0027]
(11)为活动头部;
[0028]
(12)主轴。
具体实施方式
[0029]
下面通过附图和实施例对本发明的技术方案做进一步的详细描述。
[0030]
图1是本实用新型一种可升降的双激光模拟全向射击装置结构示意图。图2是该装置系统的硬件控制示意图。参照附图,本实用新型为一种可升降的双激光模拟全向射击装置,包括步进电机(6)和减速机构(7),步进电机(6)和减速机构(7)固定于主壳(8)内部;减速机构(7)的主轴(12)与云台支承罩(4)连接;导柱导套(5)中的导套固定到云台支承罩(4)上,导柱固定到主壳(8)上;云台支承罩(4)上固定云台(3),云台(3)的活动头部(11)两边分别固定长焦激光探头(1)和短焦激光探头(2);主壳(8)下方固定底座(10),控制单元(9)固定在底座(10)上。
[0031]
在一种实施方式中,长焦激光探头(1)的攻击范围为50-400米,短焦激光探头(2)的攻击范围为0-50米。装置启动后,控制单元(9)的中央处理器与外部通信接收指令,并通过pwm信号调制控制双通道激光驱动,通过通讯接口控制云台驱动。当目标移动至距离装置50-400米时,中央处理器接收外部指令,通过pwm信号调制控制双通道激光驱动,启动长焦激光探头(1)追踪目标;当目标移动至距离装置0-50米时,中央处理器接收外部指令,通过pwm信号调制控制双通道激光驱动,启动短焦激光探头(2)追踪目标。
[0032]
在一种实施方式中,云台(3)在接收控制单元(9)的命令后实现自我360度旋转及活动头部(11)的俯仰角调整。当目标水平360度移动或上下移动时,控制单元(9)的中央处理器与外部通信接收指令,并通过通讯接口控制云台(3)实现自我360度旋转及活动头部(11)的俯仰角调整。
[0033]
在一种实施方式中,步进电机(6)在接收控制单元(9)的命令后通过减速机构(7)的主轴(12)可产生上下运动,该减速机构(7)的主轴(12)与云台支承罩(4)连接并带动云台(3)做上升或下降运动。当目标垂直移动时,中央处理器通过外部通信接收指令,并通过通讯接口向步进电机(6)发出指令,步进电机(6)驱动减速机构(7)的主轴(12)做上下运动,从而带动云台(3)做上升或下降运动。主轴(12)及云台(3)的移动范围为0-0.8米。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1