一种仿生减阻鱼皮及其制作方法
1.本发明涉及水下机器人领域,特别涉及一种仿生减阻鱼皮及其制作方法。
背景技术:
2.水下机器人作为机器人的一类,能够在人类难以触及的深度和广度上进行作业,利用水下机器人可以轻松实现水质检测、环境探查等水下工作。仿生机器鱼是参照真实鱼类的生物结构和动力学原理进行设计的,因此在水中的游动能够更加自然,并利用流体力学的原理进行控制,优越的机动性和稳定性都是传统的基于螺旋桨推动的水下机器人无法比拟的。因此仿生机器鱼无论是在经济领域还是军事领域的水下探索开发中都具有重要的研究价值和广阔的应用前景。对于多关节机器鱼而言,其体积和搭载能力有限而无法携带大容量的电池,因此如何利用好有限的能源实现更快的航速和更远的航程是一个重要的研究课题。通过给多关节机器鱼加上仿生减阻鱼皮能够有效降低其受到的流体阻力,提高巡航速度的同时能够增加航程。现有的减阻方法中,主要是模仿制作出水生生物表面特定的减阻结构来实现的,如制作出类似鲨鱼皮表面的盾鳞制作出环形沟槽表面,但现有的沿鱼皮长轴线方向并列分布的环形沟槽会破坏整体的流线型,使其表面在水下的阻力增大,并且制作起来相对复杂。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种能够有效降低其受到的流体阻力的仿生减阻鱼皮。
4.本发明还提出了一种用于制作上述仿生减阻鱼皮的制作方法。
5.根据本发明的第一方面实施例的一种仿生减阻鱼皮,包括
6.内层鱼皮,所述内层鱼皮上设置有第一通孔;
7.外层鱼皮,所述外层鱼皮上设置有第二通孔和设置在所述第二通孔内的瓣膜,所述瓣膜可相对所述第二通孔运动;
8.其中,所述外层鱼皮首尾相连,所述内层鱼皮首尾相连形成容纳腔,所述外层鱼皮罩设在所述内层鱼皮外,所述第一通孔的位置与所述第二通孔的位置相对应。
9.根据本发明第一方面实施例的一种仿生减阻鱼皮,至少具有如下有益效果:本发明的一种仿生减阻鱼皮,包括内层鱼皮和外层鱼皮,内层鱼皮上设置有第一通孔,外层鱼皮上设置有第二通孔和瓣膜,外层鱼皮首尾相连,内层鱼皮首尾相连形成容纳腔,外层鱼皮罩设在内层鱼皮外,外层鱼皮罩设在内层鱼皮外,内层鱼皮罩设在水下机器人上,当水下机器人摆动时,外层鱼皮一侧的瓣膜闭合保持密封,使外层鱼皮表面呈现流线型减小表面阻力,同时增大击水面积,提供更大的推力;同时,在摆动过程中仿生减阻鱼皮内的水从另一侧的瓣膜流出形成射流,有利于减小表面阻力,提高巡航速度的同时能够增加航程。
10.根据本发明的一些实施例,所述第一通孔设置为半圆形。
11.根据本发明的一些实施例,所述第二通孔设置为半圆形。
12.根据本发明的一些实施例,所述瓣膜的形状与所述第二通孔的形状相适配。
13.根据本发明的一些实施例,所述瓣膜的直径大于所述第一通孔的直径,使所述瓣膜无法穿过所述第一通孔。
14.根据本发明的一些实施例,所述内层鱼皮的首尾两端通过胶水粘接固定。
15.根据本发明的一些实施例,所述外层鱼皮的首尾两端通过胶水粘接固定。
16.根据本发明的一些实施例,所述外层鱼皮与所述内层鱼皮之间通过胶水粘接固定。
17.根据本发明的一些实施例,所述内层鱼皮和所述外层鱼皮设置为硅胶材质。
18.本发明还提出了一种用于制作上述仿生减阻鱼皮的制作方法。
19.根据本发明的第二方面实施例的一种仿生减阻鱼皮的制作方法,包括以下步骤:
20.设计仿生减阻鱼皮的生产模具;
21.使用3d打印技术对所述生产模具进行制作;
22.使用硅胶对模具进行浇注,得到所述仿生减阻鱼皮的内层鱼皮和外层鱼皮;
23.将所述内层鱼皮和所述外层鱼皮摊平对齐后粘紧;
24.将所述内层鱼皮卷曲成圆形,使用胶水将所述内层鱼皮的首尾两端粘紧;
25.将所述外层鱼皮卷曲成圆形,使用胶水将所述外层鱼皮的首尾两端粘紧。
26.根据本发明第一方面实施例的一种仿生减阻鱼皮的制作方法,至少具有如下有益效果:本发明采用3d打印技术制作生产模具,通过浇注硅胶获得内层鱼皮和外层鱼皮,使用胶水对内层鱼皮和外层鱼皮进行粘紧,制作简单,成本低廉,可以用于小批量低成本的制作。
27.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
28.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
29.图1是本发明一实施例的一种水下机器人的结构示意图;
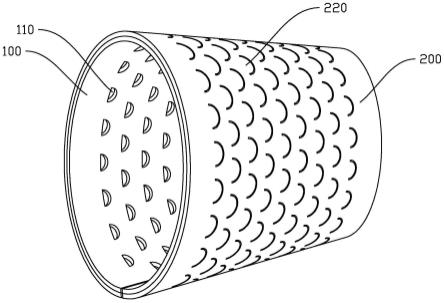
30.图2是图1所示出的仿生减阻鱼皮的结构示意图;
31.图3是图2所示出的外层鱼皮摊平时的结构示意图;
32.图4是图2所示出的内层鱼皮的结构示意图;
33.图5是图4所示出的内层鱼皮摊平时的结构示意图;
34.图6是图1所示出的瓣膜打开状态的结构示意图;
35.图7是图1所示出的瓣膜闭合状态的结构示意图。
具体实施方式
36.下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右、
内、外等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
39.本发明的描述中,除非另有明确的限定,设置、安装、连接、装配、配合等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
40.下面参照图1至图7描述本发明实施例的一种仿生减阻鱼皮。
41.本发明实施例的一种仿生减阻鱼皮,如图1至图7所示,包括内层鱼皮100和外层鱼皮200,内层鱼皮100上设置有第一通孔110,外层鱼皮200上设置有第二通孔210和设置在第二通孔210内的瓣膜220,瓣膜220可相对第二通孔210运动,外层鱼皮200首尾相连,内层鱼皮100首尾相连形成容纳腔,外层鱼皮200罩设在内层鱼皮100外,第一通孔110的位置与第二通孔210的位置相对应。
42.需要说明的是,鲨鱼呼吸的过程中鳃部产生的射流能够改变下游处的流场分布,有效减小表面阻力。本技术的仿生减阻鱼皮,包括内层鱼皮100和外层鱼皮200,内层鱼皮100上设置有第一通孔110,外层鱼皮200上设置有第二通孔210和瓣膜220,瓣膜220可相对第二通孔210运动,瓣膜220与第一通孔110、第二通孔210配合,能够在水下机器人摆动过程中产生射流,改变下游处的流场分布,有效减小表面阻力。内层鱼皮100首尾相连形成容纳腔,内层鱼皮100首尾相连形成容纳腔,内层鱼皮100通过容纳腔罩设在水下机器人外,外层鱼皮200罩设在内层鱼皮100外,第一通孔110的位置与第二通孔210的位置相对应,第二通孔210内设置有瓣膜220,瓣膜220可相对第二通孔210运动,在水下机器人摆动前进时,瓣膜220相对第二通孔210运动,外层鱼皮200两侧的瓣膜220一闭一合,能够增大击水面积,提供更大的推力,减小表面阻力。具体地,水下机器人向右摆动时,仿生减阻鱼皮右侧的瓣膜220为闭合状态,有助于增大水下机器人的击水面积,提供前进的推力;同时,在摆动过程中水下机器人右侧空间受到挤压,仿生减阻鱼皮左侧的瓣膜220为打开状态,水从左侧第二通孔210流出,在左侧形成射流,有利于减小表面阻力,提高巡航速度的同时能够增加航程。
43.可以理解的是,内层鱼皮100首尾相连形成容纳腔,容纳腔的形状可基于树下机器人的形状而改变,图2所示的容纳腔为椭圆形,适用于包覆尾部关节为椭圆形且关节尺寸渐变的水下机器人。
44.根据本发明的一些实施例,第一通孔110设置为半圆形。仿生减阻鱼皮的内层鱼皮100阵列遍布设置为半圆形的第一通孔110,第一通孔110呈多排交错布置,每一排上的第一通孔110的圆心与底边展开线等距,且同一排上相邻的两个半圆形通孔的圆心距相等。可以理解的是,在一些其他的实施例中,第一通孔110还可以设置为梯形、门形或其他形状,第一通孔110的形状不影响射流的产生,流水从梯形、门形或其他形状的第一通孔110中流出,同样能够形成射流,有利于减小表面阻力,提高巡航速度的同时能够增加航程。
45.根据本发明的一些实施例,第二通孔210设置为半圆形。第二通孔210设置有瓣膜
220,瓣膜220可以相对第二通孔210转动,呈现闭合和打开两种状态。具体地,在一些实施例中,瓣膜220的形状与第二通孔210的形状相适配,瓣膜220能够对第二通孔210的打开和闭合进行控制,在水下机器人摆动前进时,瓣膜220相对第二通孔210运动,外层鱼皮200两侧的瓣膜220一闭一合,能够增大击水面积,提供更大的推力,减小表面阻力。具体地,水下机器人向右摆动时,仿生减阻鱼皮右侧的瓣膜220为闭合状态,有助于增大水下机器人的击水面积,提供前进的推力;同时,在摆动过程中水下机器人右侧空间受到挤压,仿生减阻鱼皮左侧的瓣膜220为打开状态,水从左侧第二通孔210流出,在左侧形成射流,有利于减小表面阻力,提高巡航速度的同时能够增加航程。可以理解的是,在一些其他的实施例中,第二通孔210还可以设置为梯形、门形或其他形状,第二通孔210的形状不影响射流的产生以及瓣膜的打开或闭合,流水从梯形、门形或其他形状的第二通孔210中流出,同样能够形成射流,有利于减小表面阻力,提高巡航速度的同时能够增加航程。
46.根据本发明的一些实施例,瓣膜220的直径大于第一通孔110的直径,使瓣膜220无法穿过第一通孔110。第一通孔110设置在第二通孔210的内侧,瓣膜220无法穿过第一通孔110,在瓣膜220相对第二通孔210运动时,第一通孔110能够对瓣膜220进行限位,使瓣膜220紧贴内层鱼皮100,完成对第二通孔210的封闭,有助于增大水下机器人的击水面积,提供前进的推力。在一些实施例中,第一通孔110与第二通孔210可以设置为不同形状,只要能确保瓣膜220的直径大于第一通孔110的直径,使瓣膜220无法穿过第一通孔110即可。
47.根据本发明的一些实施例,外层鱼皮200与内层鱼皮100之间通过胶水粘接固定。内层鱼皮100设置有第一通孔110,外层鱼皮200设置有第二通孔210,外层鱼皮200平铺在内层鱼皮100上,内层鱼皮100的第一通孔110的位置与外层鱼皮200的第二通孔210的位置相对应,使用胶水将外层鱼皮200粘接在内层鱼皮100上,实现外层鱼皮200与内层鱼皮100之间的粘接固定,将外层鱼皮200和内层鱼皮100一起套设在水下机器人外。
48.根据本发明的一些实施例,内层鱼皮100的首尾两端通过胶水粘接固定。内层鱼皮100的首尾两端相连卷曲形成具有容纳腔的椭圆形,水下机器人放置在容纳腔内,将内层鱼皮100罩设在水下机器人上。内层鱼皮100的首尾两端通过胶水粘接固定,实现内层鱼皮100的首尾相连。胶水粘接的方式操作简单,成本低廉。
49.根据本发明的一些实施例,外层鱼皮200的首尾两端通过胶水粘接固定。外层鱼皮200的首尾两端相连卷曲形成椭圆形,外层鱼皮200罩设在内层鱼皮100外,外层鱼皮200的首尾两端通过胶水粘接固定,实现外层鱼皮200的首尾相连。胶水粘接的方式操作简单,成本低廉。
50.根据本发明的一些实施例,内层鱼皮100和外层鱼皮200设置为硅胶材质。硅胶材质具有良好的延展性,便于内层鱼皮100和外层鱼皮200的浇注和卷曲成型。硅胶材质通过浇注在模具即可实现内层鱼皮100和外层鱼皮200的生产,生产简单,成本低廉。可以理解的是,内层鱼皮100和外层鱼皮200还可以设置为其他具有良好延展性的弹性材料或柔性材料,能够实现卷曲成型即可。
51.本发明第二方面还提出了一种仿生减阻鱼皮的制作方法,包括以下步骤:
52.s1:设计仿生减阻鱼皮的生产模具。具体地,根据水下机器人需要包覆的形状设计出仿生减阻鱼皮的展开图,在展开图上对第一通孔110和第二通孔210的排列进行设置,进而设计出对应模具,以便于对外层鱼皮200和内层鱼皮100进行生产。
53.s2:使用3d打印技术对生产模具进行制作。根据生产模具的三维模型进行3d打印,完成对生产模具的制作。3d打印技术的生产速度更快,生产灵活性更高。
54.s3:使用硅胶对模具进行浇注,得到仿生减阻鱼皮的内层鱼皮100和外层鱼皮200。将硅胶浇注到模具中,待硅胶固化后得到仿生减阻鱼皮的内层鱼皮100和外层鱼皮200。
55.s4:将内层鱼皮100和外层鱼皮200摊平对齐后粘紧。内层鱼皮100设置有第一通孔110,外层鱼皮200设置有第二通孔210,外层鱼皮200平铺在内层鱼皮100上,内层鱼皮100的第一通孔110的位置与外层鱼皮200的第二通孔210的位置相对应,使用胶水将外层鱼皮200粘接在内层鱼皮100上,实现外层鱼皮200与内层鱼皮100之间的粘接固定。
56.s5:将内层鱼皮100卷曲成圆形,使用胶水将内层鱼皮100的首尾两端粘紧。内层鱼皮100的首尾两端通过胶水粘接固定,实现内层鱼皮100的首尾相连。胶水粘接的方式操作简单,成本低廉。
57.s6:将外层鱼皮200卷曲成圆形,使用胶水将外层鱼皮200的首尾两端粘紧。外层鱼皮200的首尾两端通过胶水粘接固定,实现外层鱼皮200的首尾相连。胶水粘接的方式操作简单,成本低廉。
58.本发明采用3d打印技术制作生产模具,通过浇注硅胶获得内层鱼皮100和外层鱼皮200,使用胶水对内层鱼皮100和外层鱼皮200进行粘紧,制作简单,成本低廉,可以用于小批量低成本的制作。
59.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1