一种新型的英雄机器人机械结构
1.本实用新型涉及机器人机械结构技术领域,尤其涉及一种新型的英雄机器人机械结构。
背景技术:
2.摩擦轮英雄机器人是一种通过摩擦轮发射炮弹的机器人,在场上是作为一个高额输出单位对建筑造成高额伤害,其较为精准的弹道配合视觉识别,可快速的推掉敌方的前哨站,目前机器人供弹的主流趋势是实行下供弹设计,而供弹时最容易出现的问题就是卡弹,且卡弹情况多出现在拨弹盘入弹口以及弹链的各个入弹口,另外现有技术中所使用的摩擦轮多是平面摩擦轮,导致在弹丸出弹时稳定性较差。
技术实现要素:
3.本实用新型提供一种新型的英雄机器人机械结构,以解决上述技术问题。
4.为解决上述技术问题,本实用新型提供的一种新型的英雄机器人机械结构,包括一体化枪管,所述一体化枪管前后两侧分别设有一个弧度摩擦轮,所述一体化枪管一侧设有颈部弹链,所述一体化枪管和颈部弹链之间安装有活动弹链,所述颈部弹链底部设有底部弹链,所述颈部弹链和底部弹链之间安装有颈部滑环,所述底部弹链一侧安装有链路,所述链路内部设有拨弹盘。
5.优选的,所述链路包括链路下侧挡板、链路中间挡板和链路上侧挡板,所述链路下侧挡板设在链路中间挡板底部,所述链路上侧挡板设在链路中间挡板顶部,所述拨弹盘设在链路中间挡板和链路上侧挡板之间并延伸至链路中间挡板和链路下侧挡板底部。
6.优选的,所述拨弹盘包括拨弹盘电机,所述拨弹盘电机设在链路中间挡板和链路上侧挡板之间并延伸至链路中间挡板和链路下侧挡板底部,且所述拨弹盘电机与链路下侧挡板通过螺栓固定拦截,所述拨弹盘电机输出轴外端固定设有拨杆,所述拨杆设在链路中间挡板和链路上侧挡板之间,且所述拨杆底端通过转轴活动连接有多个轴承。
7.优选的,多个所述轴承以拨杆中轴线呈环形阵列分布。
8.优选的,所述一体化枪管底部设有摩擦轮电机固定座,且所述一体化枪管固定连接在摩擦轮电机固定座顶端。
9.优选的,所述摩擦轮电机固定座顶端固定设有两个摩擦轮电机,所述一体化枪管设在两个摩擦轮电机之间,且所述弧度摩擦轮固定连接在摩擦轮电机输出轴外端。
10.与相关技术相比较,本实用新型提供的一种新型的英雄机器人机械结构具有如下有益效果:
11.通过拨弹盘和轴承使得弹丸在被拨动供弹时,弹丸在链路中可以更顺滑的移动,且颈部弹链和底部弹链的拐弯处均是平滑设计,极大的降低了弹丸卡弹的情况,而不同于常见的平面摩擦轮,出弹所使用的弧度摩擦轮可更充分的与弹丸接触,使得弹丸从一体化枪管内部出弹时更稳定。
附图说明
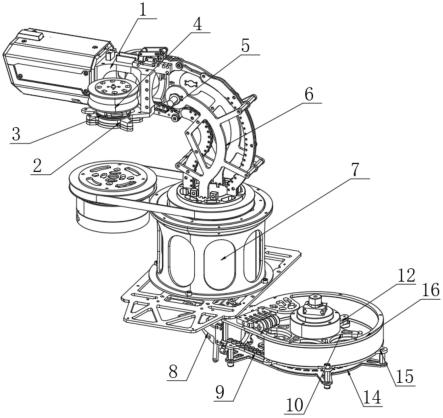
12.图1为本实用新型提出的一种新型的英雄机器人机械结构的整体第一视角结构示意图;
13.图2为本实用新型提出的一种新型的英雄机器人机械结构的整体第二视角结构示意图;
14.图3为本实用新型提出的一种新型的英雄机器人机械结构的局部第一视角立体结构示意图;
15.图4为本实用新型提出的一种新型的英雄机器人机械结构的局部第二视角整体立体结构示意图;
16.图5为本实用新型提出的一种新型的英雄机器人机械结构的活动弹链和颈部弹链立体结构示意图;
17.图6为本实用新型提出的一种新型的英雄机器人机械结构的底部弹链立体结构示意图;
18.图7为本实用新型提出的一种新型的英雄机器人机械结构的一体化枪管立体结构示意图;
19.图8为本实用新型提出的一种新型的英雄机器人机械结构的弧度摩擦轮立体结构示意图;
20.图9为本实用新型提出的一种新型的英雄机器人机械结构的拨弹盘立体结构示意图。
21.图中标号:1、一体化枪管,2、摩擦轮电机固定座,3、摩擦轮电机,4、弧度摩擦轮, 5、活动弹链,6、颈部弹链,7、颈部滑环,8、底部弹链,9、链路,10、拨弹盘电机, 11、拨弹盘,12、拨杆,13、轴承,14、链路下侧挡板,15、链路中间挡板,16、链路上侧挡板。
具体实施方式
22.实施例,由图1-9给出,本实用新型包括一体化枪管1,所述一体化枪管1前后两侧分别设有一个弧度摩擦轮4,所述一体化枪管1一侧设有颈部弹链6,所述一体化枪管1 和颈部弹链6之间安装有活动弹链5,所述颈部弹链6底部设有底部弹链8,所述颈部弹链6和底部弹链8之间安装有颈部滑环7,所述底部弹链8一侧安装有链路9,所述链路9 内部设有拨弹盘11,弧度摩擦轮4与常见的平面摩擦轮不同,弧度摩擦轮4可更充分的与弹丸相接触,进而提高了弹丸出弹时的稳定性。
23.所述链路9包括链路下侧挡板14、链路中间挡板15和链路上侧挡板16,所述链路下侧挡板14设在链路中间挡板15底部,所述链路上侧挡板16设在链路中间挡板15顶部,所述拨弹盘11设在链路中间挡板15和链路上侧挡板16之间并延伸至链路中间挡板15和链路下侧挡板14底部,弹丸在链路9内部被拨弹盘11拨动依次进入底部弹链8内部。
24.所述拨弹盘11包括拨弹盘电机10,所述拨弹盘电机10设在链路中间挡板15和链路上侧挡板16之间并延伸至链路中间挡板15和链路下侧挡板14底部,且所述拨弹盘电机 10与链路下侧挡板14通过螺栓固定拦截,所述拨弹盘电机10输出轴外端固定设有拨杆12,所述拨杆12设在链路中间挡板15和链路上侧挡板16之间,且所述拨杆12底端通过转轴活动连接有多个轴承13,拨弹盘11内的拨杆12上的圆弧槽弧度大于弹丸的弧度,再加上轴承13的
配合,既可保证大弹丸供弹顺畅又可以使其对大弹丸的压力变小。
25.多个所述轴承13以拨杆12中轴线呈环形阵列分布,环形阵列分布可使得弹丸能够更有效顺畅的供弹。
26.所述一体化枪管1底部设有摩擦轮电机固定座2,且所述一体化枪管1固定连接在摩擦轮电机固定座2顶端,摩擦轮电机固定座2既便于安装摩擦轮电机3,又便于安装固定一体化枪管1。
27.所述摩擦轮电机固定座2顶端固定设有两个摩擦轮电机3,所述一体化枪管1设在两个摩擦轮电机3之间,且所述弧度摩擦轮4固定连接在摩擦轮电机3输出轴外端,摩擦轮电机3可带动弧度摩擦轮4转动。
28.工作原理:
29.在使用时弹丸在链路9内部通过拨弹盘11有序拨动使得弹丸能够进入底部弹链8内部,而在拨弹盘11工作时首先需要开启拨弹盘电机10,拨弹盘电机10输出轴旋转时带动拨杆12转动,弹丸处于拨杆12上圆弧槽内部,且圆弧槽的弧度大于弹丸的弧度,随着拨杆12的转动弹丸会随着一起移动,期间轴承13会沿着弹丸外端滚动,使得拨杆12转动以及弹丸滚动更顺畅,弹丸进入底部弹链8内部后会被后续的弹丸顶住使得首先进入底部弹链8内部的弹丸会依次经过颈部滑环7、颈部弹链6和活动弹链5,最终进入一体化枪管1内部,而摩擦轮电机3输出轴转动时会带动弧度摩擦轮4转动,且弧度摩擦轮4外端设计为弧面,使得弧度摩擦轮4外端能够充分的与弹丸外端相接触,然后在两个弧度摩擦轮4配合摩擦弹出弹丸时,弹丸能够更稳定的从一体化枪管1内出弹射出。
技术特征:
1.一种新型的英雄机器人机械结构,包括一体化枪管(1),其特征在于:所述一体化枪管(1)前后两侧分别设有一个弧度摩擦轮(4),所述一体化枪管(1)一侧设有颈部弹链(6),所述一体化枪管(1)和颈部弹链(6)之间安装有活动弹链(5),所述颈部弹链(6)底部设有底部弹链(8),所述颈部弹链(6)和底部弹链(8)之间安装有颈部滑环(7),所述底部弹链(8)一侧安装有链路(9),所述链路(9)内部设有拨弹盘(11)。2.根据权利要求1所述的一种新型的英雄机器人机械结构,其特征在于,所述链路(9)包括链路下侧挡板(14)、链路中间挡板(15)和链路上侧挡板(16),所述链路下侧挡板(14)设在链路中间挡板(15)底部,所述链路上侧挡板(16)设在链路中间挡板(15)顶部,所述拨弹盘(11)设在链路中间挡板(15)和链路上侧挡板(16)之间并延伸至链路中间挡板(15)和链路下侧挡板(14)底部。3.根据权利要求2所述的一种新型的英雄机器人机械结构,其特征在于,所述拨弹盘(11)包括拨弹盘电机(10),所述拨弹盘电机(10)设在链路中间挡板(15)和链路上侧挡板(16)之间并延伸至链路中间挡板(15)和链路下侧挡板(14)底部,且所述拨弹盘电机(10)与链路下侧挡板(14)通过螺栓固定拦截,所述拨弹盘电机(10)输出轴外端固定设有拨杆(12),所述拨杆(12)设在链路中间挡板(15)和链路上侧挡板(16)之间,且所述拨杆(12)底端通过转轴活动连接有多个轴承(13)。4.根据权利要求3所述的一种新型的英雄机器人机械结构,其特征在于,多个所述轴承(13)以拨杆(12)中轴线呈环形阵列分布。5.根据权利要求1所述的一种新型的英雄机器人机械结构,其特征在于,所述一体化枪管(1)底部设有摩擦轮电机固定座(2),且所述一体化枪管(1)固定连接在摩擦轮电机固定座(2)顶端。6.根据权利要求5所述的一种新型的英雄机器人机械结构,其特征在于,所述摩擦轮电机固定座(2)顶端固定设有两个摩擦轮电机(3),所述一体化枪管(1)设在两个摩擦轮电机(3)之间,且所述弧度摩擦轮(4)固定连接在摩擦轮电机(3)输出轴外端。
技术总结
本实用新型公开了一种新型的英雄机器人机械结构,涉及机器人机械结构技术领域,包括一体化枪管,所述一体化枪管前后两侧分别设有一个弧度摩擦轮,所述一体化枪管一侧设有颈部弹链,所述一体化枪管和颈部弹链之间安装有活动弹链,所述颈部弹链底部设有底部弹链,所述颈部弹链和底部弹链之间安装有颈部滑环,所述底部弹链一侧安装有链路,所述链路内部设有拨弹盘,通过拨弹盘和轴承使得弹丸在被拨动供弹时,弹丸在链路中可以更顺滑的移动,且颈部弹链和底部弹链的拐弯处均是平滑设计,极大的降低了弹丸卡弹的情况,而不同于常见的平面摩擦轮,出弹所使用的弧度摩擦轮可更充分的与弹丸接触,使得弹丸从一体化枪管内部出弹时更稳定。定。定。
技术研发人员:李晓记 梁睿哲 蒙忠乾 潘韬 李金运 韦超 唐生 张国灏 莫桂院 莫祖刚 徐凯 韩轩沫依 何灿鹏 林俏锦 郭凯
受保护的技术使用者:桂林电子科技大学
技术研发日:2022.05.17
技术公布日:2022/9/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1