智能割草机的制作方法
[0001]
本发明涉及割草机领域,特别是涉及一种高效切割的智能割草机。
背景技术:
[0002]
随着科技水平的提高与社会的发展,智能的自动行走设备为人们所熟知,由于自动行走设备无需人为的操作与干预,因此在工业及家居产品上应用的非常广泛。工业上的应用如执行各种功能的机器人,家居产品上的应用如割草机、吸尘器等,这些智能的自动行走设备极大地节省了人们的时间,给工业生产及家居生活都带来了极大的便利。
[0003]
智能割草机是常用的一种家用产品,可以用来自动地执行割草任务,修剪草坪,保持草坪的整洁与秀美。智能割草机通常包括壳体、驱动模块、切割模块、控制模块等结构组成,其中切割模块包括切割单元、切割马达。切割马达驱动切割单元,通过切割单元的高速旋转进行割草作业。为了满足不同用户对割草效率的不同要求,智能割草机可设置多个切割单元。常规的技术中,智能割草机的多个切割单元分别由多个切割马达驱动,进一步增加了产品的制造成本。
技术实现要素:
[0004]
为克服现有技术的缺陷,本发明所要解决的问题是提供一种智能割草机,其切割模块结构简单且切割效率高。
[0005]
本发明所要解决的技术问题是通过如下技术方案实现的:
[0006]
一种智能割草机,包括壳体,用于安装驱动模块、切割模块、控制模块;所述驱动模块,包括驱动马达和驱动马达驱动的行走组件;所述切割模块,包括安装于所述壳体的切割马达,以及由所述切割马达驱动的切割单元;所述控制模块,与所述驱动模块、切割模块连接,控制所述智能割草机行走和工作;其特征在于:所述切割单元包括第一切割单元和第二切割单元,所述切割马达驱动所述第一切割单元绕切割马达输出轴以预设方向旋转,形成第一切割区域;通过传动机构带动所述第二切割单元以预设方向旋转,形成第二切割区域;所述第一切割区域与第二切割区域位于同一平面。
[0007]
进一步的,所述传动机构在高度方向上设置于所述切割马达与所述切割单元之间。
[0008]
进一步的,所述传动机构包括同步带传动机构,所述同步带传动机构包括第一同步带轮、第二同步带轮、同步带。。
[0009]
进一步的,所述传动机构包括齿轮传动机构,所述齿轮传动机构包括第一齿轮、第二齿轮、第三齿轮。
[0010]
进一步的,所述第一切割区域与第二切割区域在横向方向上的投影有重合区域。
[0011]
进一步的,所述第一切割区域的旋转中心与所述第二切割区域的旋转中心连线与所述壳体的水平纵轴线大致垂直。
[0012]
进一步的,所述第一切割区域的圆心旋转中心与所述第二切割区域的旋转中心连
线与所述壳体的水平纵轴线构成的夹角小于90度。
[0013]
进一步的,所述第一切割区域与所述第二切割区域相交。
[0014]
进一步的,所述第一切割单元与所述第二切割单元的旋转速度相同。
[0015]
进一步的,所述第一切割单元与所述第二切割单元分别包括第一刀盘和第二刀盘,所述第一刀盘与所述第二刀盘上分别安装多个切割刀片。
[0016]
进一步的,所述第一切割区域与所述第二切割区域的相交区域具有两个交点,所述两个交点与任一刀盘圆心的连线构成α,所述切割刀片的切割端有两个端点,所述第一刀盘或所述第二刀盘上两个相邻切割刀片具有距离最近的两个端点,所述距离最近的两个端点与所在刀盘的圆心连线构成夹角β,所述夹角α小于二分之一的夹角β。
[0017]
进一步的,所述夹角α的取值范围为24~36度,所述夹角β的取值范围为102~114度。
[0018]
进一步的,所述第一切割区域与所述第二切割区域外切或外离。
[0019]
综上所述,本发明有益效果是:提供一种切割模块切割效率高且结构简单的智能割草机,较大的切割宽度,适用于大面积工作区域;同时采用一个切割马达,其中一个切割单元绕切割马达输出轴以预设方向旋转,通过传动机构驱动另一切割单元旋转,两个切割单元的旋转方向相同,使得结构简单,成本低廉,空间排布紧凑。
附图说明
[0020]
以上所述的本发明的目的、技术方案以及有益效果可以通过下面附图实现:
[0021]
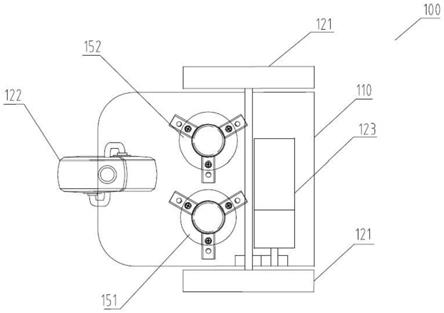
图1为本发明第一实施例智能割草机的俯视方向示意图。
[0022]
图2为沿图1中智能割草机主视方向的剖视示意图。
[0023]
图3为本发明第一实施例智能割草机的切割单元俯视方向示意图。
[0024]
图4为本发明第二实施例智能割草机的齿轮传动机构俯视方向示意图。
[0025]
图5为本发明第三实施例智能割草机的切割单元俯视方向示意图。
[0026]
附图中的相关元件对应编号如下:
[0027]
具体实施方式
[0028]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
[0029]
下面结合附图,说明智能割草机100的较佳实施方式。
[0030]
实施例一
[0031]
如图1至图4所示是本发明第一实施例。参图1,智能割草机100包括壳体110;驱动模块,用于行走,包括驱动马达和多个行走组件用于支撑及引导智能割草机100在地面移动。本实施例的驱动马达为123,壳体110内设置有为驱动马达123提供能量的能量单元,本实施例采用的是电池包。控制模块与驱动模块、切割模块以及能量单元电连接,具有连接和控制各功能模块的集成电路板,可以控制驱动模块带动智能割草机100在界定区域内行走,并控制切割模块执行切割工作任务。参图3,切割模块,执行割草工作,包括安装于壳体110的切割马达130,切割马达输出轴131输出旋转动力。切割单元以及传动机构140与切割马达输出轴131连接,并由切割马达130驱动旋转,具体为切割单元包括第一切割单元151和第二切割单元152,切割马达130驱动第一切割单元151绕切割马达输出轴131以预设方向旋转,形成第一切割区域161;通过传动机构140带动第二切割单元152以预设方向旋转,形成第二切割区域162;第一切割区域161与第二切割区域162位于同一平面。切割马达输出轴131的轴线与第一切割单元旋转轴132的轴线重合,第一切割单元旋转轴132与第二切割单元旋转轴133平行竖直排布,旋转的预设方向可以设置为顺时针方向,也可以设置为逆时针方向。本实施例中智能割草机100安装两个切割单元,但是也可以安装两个以上数量的切割单元,
本发明实施例以安装2个切割单元为例进行展开。同时,智能割草机100的行走组件可以包括2个驱动轮121和一个导向轮122,但这只是一种可选的方式,行走组件也可以包括其他数量的驱动轮121和其他数量的导向轮122,还可以采用履带式行走组件,只要能保证车辆正常移动即可。本发明在仅使用一个切割马达130,不需要其他换向组件,尽可能使用更少的传动部件的情况下,实现双切割单元同向旋转,基于此产生了结构紧凑,成本低的有益效果。
[0032]
智能割草机100切割模块的传动机构140设置在切割马达130的下方,在高度方向上位于切割马达130和切割单元之间,该排布方式可以节省更多的空间,以设置其他的功能模块。应当知晓,传动机构140设置在切割马达130下方的位置关系只是本发明的一种可选的实施方式,在必要的情况下,也可以将传动机构140设置在切割马达130的上方,不因以此作为对本发明的限制。本实施例的传动机构140为同步带传动机构,如图2所示,包括第一同步带轮141、第二传同步带轮142、同步带143,同步带143采用一根内周表面设有等间距齿形的环形带,同步带143的内周表面与同步带轮相啮合。同步带轮采用金属材料或工程塑料制成,其表面设置齿槽,与同步带143啮合传动,因此同步带143与同步带轮之间不存在相对滑动。传动效率高,传动比准确,角速度恒定,节省智能割草机100的传动能量。第一同步带轮141通过轴承与切割马达输出轴131连接,切割马达130驱动第一同步带轮141旋转,第一同步带轮141通过与同步带143啮合传动带动第二传动带轮142同步旋转,第一同步带轮141仅通过同步带143与第二同步带轮142连接,而不需要其它中间组件(如换向轮、张紧轮等),使得带传动机构140的结构简单,重量轻,成本低廉。第一同步带轮141与第一切割单元151同轴旋转,第二同步带轮142通过轴承与第二切割单元152旋转轴连接,同轴旋转。本实施例中第一同步带轮141与第二同步带轮142的半径和其它规格均相同,因此旋转速度相同,进而实现第一切割单元与第二切割单元能同速旋转。当然也可以设置不同规格,以获得不同的旋转速度,具体根据切割区域之间的位置关系确定,如若切割区域相交则设置相同的规格参数以获得相同的旋转速度,若切割区域外切或外离则切割单元的旋转速度可以相同也可以不相同,不因以此作为对本发明的限制。切割单元相较于地面高度可调节,以使智能割草机100割草时可完成不同高度的切割。当智能割草机100需要调节切割高度时,传动机构140与切割单元相较于地面同时产生高度变化。
[0033]
参照图3,智能割草机100具有执行割草工作的切割单元,包括第一切割单元151和第二切割单元152,第一切割单元151产生第一切割区域161,第二切割单元152产生第二切割区域162,两个切割区域均为圆环形区域,设置两个切割单元可增加智能割草机100的切割区域的横向宽度,进而提高割草效率。为防止两个切割单元之间产生漏割区域,需要保证两个切割区域在横向方向上存在重合的切割区域,所述横向方向是指在水平面上与智能割草机100的水平纵轴线垂直的方向,设置横向方向上的重合切割区域分为两种方案,第一种方案为第一切割区域161的旋转中心与第二切割区域162的旋转中心连线与智能割草机的水平纵轴线大致垂直,两个圆环形的切割区域的位置关系为相交,产生相交区域即为重合的切割区域;第二种方案为第一切割区域161的旋转中心与第二切割区域162的旋转中心连线与智能割草机的水平纵轴线的夹角为锐角,两个切割区域的位置关系可以为相交、外切、外离,只要保证两个切割区域在横向方向上存在重合的切割区域即可。本实施例以第一种方案为例展开,第一切割单元151包括安装有切割刀片155的第一刀盘153,第二切割单元
152包括安装有切割刀片155的第二刀盘154,本实施例中刀盘的圆心即为切割区域的旋转中心。第一刀盘的圆心q1与第二刀盘的圆心q2连线与智能割草机的水平纵轴线大致垂直,该排布方式可以尽可能减小智能割草机100前后行走轮的距离,使得智能割草机100的结构更加紧凑,从而缩小了智能割草机100的体积,产生降低成本的有益效果。第一刀盘153与第二刀盘154位于同一平面,以保证智能割草机将草坪修剪的更加平整和美观。第一刀盘153和第二刀盘154具有相同的旋转速度,其上分别沿刀盘周向设置多个径向延伸的切割刀片155,多个切割刀片155与刀盘紧固或枢转连接,本实施例采用的是枢转连接,通过螺栓157以及与螺栓螺纹配接的螺母将切割刀片155可枢转的安装在刀盘上。当然本领域技术人员可以设想其他固定装置替换。本实施例可选为3个切割刀片155围绕刀盘圆周相错120度排布。可选的切割刀片155包括安装端和切割端,切割端具有两个端点,分别为端点155a和端点155b,安装端与刀盘可拆卸连接,因此方便更换及维护,切割端延伸出刀盘外侧,执行割草任务。以智能割草机100行进方向为前侧方向,可选的刀盘前侧离地高度小于刀盘后侧的离地高度,即刀盘所处的平面沿前侧方向向下倾斜。如图3所示的阴影区域为第一切割区域161和第二切割区域162,两个切割区域为圆环形,为防止两个切割区域之间产生漏割区域,第一切割区域161与第二切割区域162相交,产生相交区域163,相交区域163过大会导致重复切割严重,造成能源的浪费,相交区域163过小仍会发生漏割现象。本实施例中两个圆环形的相交区域163具有两个交点,两个交点分别与任一刀盘圆心连线构成夹角α,第一刀盘153或第二刀盘154上具有相邻的切割刀片155,相邻切割刀片155之间具有距离最近的两个切割端的端点,如图3所示,端点155b和端点155a’,两个端点分别与所在刀盘的圆心q1连线构成夹角β,夹角α小于二分之一夹角β。本实施例可选的夹角β的取值范围为102~114度,夹角α的取值范围为24~36度。对夹角α和夹角β的设定,使得相交区域163的范围可以保证在传动机构不采用换向组件的情况下实现两个刀盘同向旋转,切割刀片155之间互不干涉,进而实现结构紧凑、不漏割、成本低的有益效果。
[0034]
实施例二
[0035]
实施例二与实施例一的区别在于传动机构的设计不同。参照图5,本实施例的传动机构为齿轮传动机构,设置在切割马达130下方,包括齿轮防护罩体174和安装于齿轮防护罩体174内的传动组件170,齿轮防护罩体174包括第一壳体与第二壳体,两部分壳体通过紧固件使两者形成盒体,传动组件均位于盒体内,防止因水滴、灰尘或其它杂物侵入传动组件170中,影响其传动效果,保持传动空间洁净,传动组件170包括第一齿轮171、第二齿轮172和第三齿轮173,第一齿轮171水平放置通过轴承与切割马达130输出轴连接,切割马达130为输出轴输出驱动力,使得第一齿轮171绕切割马达130输出轴中心旋转,第一齿轮171与第三齿轮173啮合传动,第三齿轮173与第二齿轮172啮合传动,第二齿轮172与第二切割单元152的旋转轴通过轴承固定连接,第一齿轮171、第二齿轮172与第三齿轮173位于同一平面内,本实施例中第一齿轮171与第二齿轮172的半径和其它规格均相同,因此在传动过程中,第一齿轮171与第二齿轮172的旋转速度相同,以保证第一切割单元151与第二切割单元152的旋转速度相同,当然也可以设置不同的规格参数以获得不同的旋转速度,具体应与切割区域的位置关系确定,不因以此作为对本发明的限制。第三齿轮173直径可根据两个切割单元的旋转轴之间的距离确定,本实施例中,可选的第三齿轮173直径大于第一齿轮171和第二齿轮172的直径。切割马达130驱动第一齿轮171旋转,与中间轮第三齿轮173啮合将旋转
动力传递到第二齿轮172,进而实现第二切割单元152与第一切割单元151同向旋转。
[0036]
实施例三
[0037]
实施例三与实施例一的区别在于切割单元的空间排布不同,即保证两个切割区域在横向方向上存在重合的切割区域的第二种情况。如图5所示。本实施例第一切割单元151的旋转中心与第二切割单元152的旋转中心连线与智能割草机100的水平纵轴线构成的夹角,即为第一刀盘圆心q1与第二刀盘圆心q2连线与智能割草机100的水平纵轴线构成的夹角,设定该夹角的取值范围小于90度,使得第一切割单元151与第二切割单元152前后相错排布,第一刀盘153旋转产生第一切割区域161,第二刀盘154旋转产生第二切割区域162,两个切割区域斜置排布,位置关系可以为相交、外切或外离,若两个切割区域之间的位置关系为相交,在同步机构不采用换向组件的情况下,只需要限定相交区域的范围,就可以保证两个刀盘在同向旋转过程中,安装在刀盘上的切割刀片155不会发生碰撞,即相交区域的两个交点与任意刀盘圆心的连线构成的夹角α,刀盘相邻切割刀片155距离最近的端点与所在刀盘圆心连线构成夹角β,夹角α小于二分之一的夹角β。本实施例可选的夹角β的取值范围为102~114度,夹角α的取值的范围为24~36度。若两个切割区域之间位置关系为外切,第一切割区域161与第二切割区域162在横向上的投影具有重合部分,可保证具有重复的切割区域。若两个切割区域之间位置关系为外离,第一切割区域161的横向半径与第二切割区域162的横向半径在横向上的投影具有重合部分,重合部分的长度即为重复切割区域的最大横向宽度。因此只要保证两个圆形切割区域的横向半径在横向上的投影具有重合部分即可实现防漏割的目的。以上两个切割区域之间外离和外切的位置关系,切割刀片155在旋转过程中不会产生碰撞的可能,因此两个刀盘相邻刀片的夹角可以设置任意角度,本实施例可选的两个切割区域之间采用外切的排布方式,在刀盘旋转刀片互不干涉且具有重复切割区域的情况下尽可能的减小智能割草机100的横向宽度。
[0038]
以上实施例各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0039]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1