一种快速辅助绿萼梅移栽设备及其操作方法与流程
1.本发明涉及移栽设备技术领域,更具体地说,本发明具体为一种快速辅助绿萼梅移栽设备及其操作方法。
背景技术:
2.绿萼,是梅花名品,也是最有君子气质的梅花,绿萼梅花色洁白,香味极浓,有“花中君子”的美称,具有调理脾胃、疏理气血,的功效,所以无论是家里的老人,还是幼儿,都可以用绿萼梅来保健,常用于郁闷心烦、肝胃气痛、食欲不振等症,具有很高的药用价值和观赏价值。
3.如今城市绿化越来越受到人们的关注,对于树木移栽的需求也逐渐增大,因此需要投入更多的人力物力去移栽园林树木来增加绿化,国内外挖穴栽植树木的机械发展较早,产品相应较多,其性能基本上能够满足林业生产中的挖穴种植的技术要求,而树木的移植挖掘机械则起步较晚,技术相应也不够成熟。
4.现有的树木移栽设备主要通过液压驱动的方式将多个可组合形成锥形筒结构的移栽机锹铲进行下压驱动,切断多余根茎以及和原生土壤层的联系将树木底冠和周围少量土壤进行分离,运输至指定位置进行栽培,结构过于简单,功能单一;移栽锹铲下行时主要通过液压进行驱动切割闭合,锹铲下行阻力过大需启用大功率液压系统结构,装置成本高额且设备体积巨大,实用性较低。
5.另外,为保证锹铲的结构强度,防止土壤层内部岩石等硬质物块对锹铲的损伤,在锹铲表面并无任何切断机构难以切断根茎,绿萼梅移栽过程中的根茎大多通过锹铲的下行运动进行牵扯拉断,导致树木根茎受损,影响树木存活率,且锹铲内外表面易黏附大量土壤导致包裹树木根茎的原生土壤脱落疏散,导致移栽失败,存在一定缺陷。
6.因此亟需提供一种快速辅助绿萼梅移栽设备及其操作方法。
技术实现要素:
7.为了克服现有技术的上述缺陷,本发明的实施例提供一种快速辅助绿萼梅移栽设备及其操作方法,设置振动减阻机构,利用偏振激励器的电动振动带动移栽锹铲在下行挖掘的过程中进行高频振动,且利用锹铲边缘以及底部的切削刃结构进行切削土壤层以及根茎进一步降低挖掘阻力,防止土壤与锹铲的黏附,以解决上述背景技术中提出的问题。
8.为实现上述目的,本发明提供如下技术方案:一种快速辅助绿萼梅移栽设备,包括第一移栽抱环、第二移栽抱环和聚合导向机构,所述第一移栽抱环和第二移栽抱环的内侧固定安装有聚合导向机构,所述聚合导向机构的内部滑动安装有液压驱动机构,所述液压驱动机构的输出端与聚合导向机构的顶面固定连接,所述第一移栽抱环和第二移栽抱环的底面固定安装有振动减阻机构,所述锥形抱铲包括移栽锹铲和导向翼板,所述导向翼板固定焊接于导向翼板的外侧,所述导向翼板的一侧开设有连接缺槽,所述聚合导向机构包括导向滑轨和滑动凸块,所述滑动凸块的一侧与液压驱动机构的外侧固定连接,所述滑动凸
块的外侧与导向滑轨的内侧滑动抵接,所述滑动凸块的内侧与液压驱动机构的外侧焊接固定;
9.所述振动减阻机构包括安装盒、偏振激励器和偏振传导叉,所述偏振激励器的一侧固定安装有弹性连接件,所述弹性连接件的另一端与安装盒的内壁固定连接,所述偏振传导叉的顶端与偏振激励器的底端固定连接,所述连接缺槽的内部设有振动导块,所述偏振传导叉的内侧开设有通槽,所述偏振传导叉滑动套接于振动导块的外侧,所述振动导块的长度等于导向滑轨的长度,所述导向滑轨为电动滑轨结构。
10.在一个优选地实施方式中,所述第一移栽抱环和第二移栽抱环的结构大小相同,所述第一移栽抱环和第二移栽抱环呈半圆弧结构,所述第一移栽抱环和第二移栽抱环的外侧焊接固定有固定耳端。
11.在一个优选地实施方式中,所述液压驱动机构的输入端固定连接有液压驱动机构,所述液压驱动机构为液压泵结构,所述液压驱动机构的输出端与移栽锹铲的顶面固定连接,所述液压驱动机构和移栽锹铲的数量相等并一一对应。
12.在一个优选地实施方式中,所述移栽锹铲呈三角形扇面结构,所述移栽锹铲的截面呈弧形结构,所述移栽锹铲的两侧开设有聚合侧刃,所述移栽锹铲的底端设有切削锥头,所述导向翼板焊接于移栽锹铲一侧的中部并与移栽锹铲的侧面相垂直。
13.在一个优选地实施方式中,所述偏振激励器包括偏振盒和偏振电机,所述偏振电机固定安装于偏振盒的内部,所述偏振电机的输出端固定套接有偏振块,所述偏振块为偏心圆盘结构,所述偏振电机的输出端电性连接有控制器。
14.在一个优选地实施方式中,所述移栽锹铲和导向翼板的表面呈圆滑光面结构,所述移栽锹铲和导向翼板为不锈钢材质构件。
15.快速辅助绿萼梅移栽设备的操作方法,包括以下步骤:
16.s1.安装与电路接通:将该移栽设备通过第一移栽抱环和第二移栽抱环侧边的固定耳端安装于牵引农机的搭载平台,将液压驱动机构的输入端与牵引农机的液压驱动机构进行连通,连接偏振激励器的电源控制电路;
17.s2.测试与频率确定:根据该移栽设备待接触的土壤类型,选定若干块待工作的土壤样本地块,通过液压驱动机构直接驱动锥形抱铲下行运动,测量液压驱动机构的驱动力从而测算锥形抱铲的下行阻力大小,根据实验所得振动频率与阻力消减线性关系,确定振动减阻机构所需工作频率,实现锥形抱铲的有效振动;
18.s3.准备工作:驱动液压驱动机构进行收缩运动使得各个移栽锹铲进行张开运动,将第一移栽抱环和第二移栽抱环进行张开套接于待移栽绿萼梅树干两侧并回复第一移栽抱环合第二移栽抱环的聚合位置,调整设备高度,使得移栽锹铲底端与地面接触即可;
19.s4.开始与移栽挖掘阶段:启动振动减阻机构的工作电源带动,通过偏振传导叉与振动导块的啮合传动实现移栽锹铲和导向翼板的有效振动,通过液压驱动机构的驱动使得移栽锹铲下行运动插入土壤,利用偏振电机的电动振动带动移栽锹铲在下行挖掘的过程中进行高频振动,减小土壤层对锹铲运动的阻力作用,且利用移栽锹铲边缘以及底部的聚合侧刃和切削锥头进行切削土壤层以及根茎降低挖掘阻力,在移栽锹铲下行运动的过程中通过移栽锹铲内外弧面的作用使得移栽锹铲收土壤层应力作用向内侧聚拢,使得液压驱动机构和移栽锹铲整体沿导向滑轨向内侧滑动聚拢,最终各个移栽锹铲进行聚拢贴合形成完整
的锥形抱铲将树木底冠以及部分原生土壤包裹在锥形抱铲的内部;
20.s5.移栽输送阶段:在移栽锹铲聚拢完成后通过牵引机搭载平台的上升运动,将完整的树木底冠与部分原生土壤进行升高提起,进行搬运移动;
21.s6.移栽结束阶段:在待移栽地点挖掘适合大小的栽培坑,通过牵引农机搭载平台的下降运动将移栽树木准确放入栽培坑内部,启动液压驱动机构进行回退,带动移栽锹铲沿树木底冠的土壤层锥面进行上升运动,实现释放,打开第一移栽抱环和第二移栽抱环将移栽设备与树木分离,覆土填平栽培坑与树木底冠的缝隙即可。
22.在一个优选地实施方式中,在步骤s1中牵引农机的搭载平台为可升降平台,液压驱动机构的动力与牵引农机的液压动力总成进行连通。
23.在一个优选地实施方式中,在步骤s2中移栽设备与土壤相互作用时,土壤的理化性质决定了移栽设备挖掘组件与土壤接触时阻力的大小,不同的土壤类型,移栽设备的设计参数也不同,经大量测样确定振动频率与阻力消减的线性关系。
24.在一个优选地实施方式中,在步骤s4中移栽锹铲下行移动中的有效振动使得移栽锹铲内外侧与土壤的高频运动接触,使得挖掘切削面振动匀实成光滑面结构,防止土壤黏附于移栽锹铲表面黏附。
25.本发明的技术效果和优点:
26.1、本发明通过设置振动减阻机构,利用偏振激励器的电动振动带动移栽锹铲在下行挖掘的过程中进行高频振动,减小土壤层对锹铲运动的阻力作用,且利用锹铲边缘以及底部的切削刃结构进行切削土壤层以及根茎进一步降低挖掘阻力,提高挖掘效率和机械转化效能;
27.2、本发明通过利用振动减阻的形式,利用移栽锹铲的高频振动,在移栽锹铲下行移动中,可进行有效振动使得硬质杂物于移栽锹铲表面切削部进行偏离运动,防止硬质石块等杂物造成锹铲卷刃受损,提高其使用寿命;
28.3、本发明通过移栽锹铲下行移动中的有效振动,实现移栽锹铲内外侧土壤的高频运动接触,使得挖掘切削面振动匀实成光滑面结构,防止土壤与锹铲的黏附,提高该移栽挖掘机构的实用性;
29.4、本发明通过在移栽锹铲表面设置切削刃结构,利用移栽锹铲的高频振动的下行运动,通过切削刃实现对植物根茎的运动锯断,切断操作更为顺畅,防止对根茎的拉扯损伤,保护作物根茎提高其移栽存活率。
附图说明
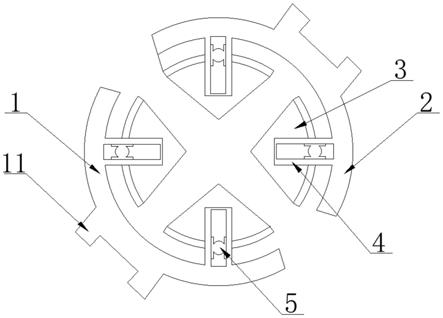
30.图1为本发明的整体结构示意图。
31.图2为本发明的侧视结构示意图。
32.图3为本发明的移栽锹铲结构示意图。
33.图4为本发明的移栽锹铲运动结构示意图。
34.图5为本发明的振动减阻机构结构示意图。
35.图6为本发明的操作方法结构示意图。
36.图7为本发明的振动频率与阻力消减线性关系示意图。
37.附图标记为:1、第一移栽抱环;2、第二移栽抱环;3、锥形抱铲;4、聚合导向机构;5、
液压驱动机构;6、振动减阻机构;11、固定耳端;31、移栽锹铲;32、导向翼板;33、连接缺槽;311、聚合侧刃;312、切削锥头;331、振动导块;41、导向滑轨;42、滑动凸块;61、安装盒;62、偏振激励器;63、偏振传导叉;621、偏振盒;622、偏振电机。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.如说明书附图1-5的一种快速辅助绿萼梅移栽设备,包括第一移栽抱环1、第二移栽抱环2和聚合导向机构4,第一移栽抱环1和第二移栽抱环2的内侧固定安装有聚合导向机构4,聚合导向机构4的内部滑动安装有液压驱动机构5,液压驱动机构5的输出端与聚合导向机构4的顶面固定连接,第一移栽抱环1和第二移栽抱环2的底面固定安装有振动减阻机构6,锥形抱铲3包括移栽锹铲31和导向翼板32,导向翼板32固定焊接于导向翼板32的外侧,导向翼板32的一侧开设有连接缺槽33,聚合导向机构4包括导向滑轨41和滑动凸块42,滑动凸块42的一侧与液压驱动机构5的外侧固定连接,滑动凸块42的外侧与导向滑轨41的内侧滑动抵接,滑动凸块42的内侧与液压驱动机构5的外侧焊接固定;
40.振动减阻机构6包括安装盒61、偏振激励器62和偏振传导叉63,偏振激励器62的一侧固定安装有弹性连接件,弹性连接件的另一端与安装盒61的内壁固定连接,偏振传导叉63的顶端与偏振激励器62的底端固定连接,连接缺槽33的内部设有振动导块331,偏振传导叉63的内侧开设有通槽,偏振传导叉63滑动套接于振动导块331的外侧,振动导块331的长度等于导向滑轨41的长度,导向滑轨41为电动滑轨结构。
41.参考说明书附图1和2所示,第一移栽抱环1和第二移栽抱环2的结构大小相同,第一移栽抱环1和第二移栽抱环2呈半圆弧结构,第一移栽抱环1和第二移栽抱环2的外侧焊接固定有固定耳端11,实现该移栽设备的安装。
42.参考说明书附图2所示,液压驱动机构5的输入端固定连接有液压驱动机构,液压驱动机构为液压泵结构,液压驱动机构5的输出端与移栽锹铲31的顶面固定连接,液压驱动机构5和移栽锹铲31的数量相等并一一对应,用于执行移栽锹铲31的液压驱动下移。
43.参考说明书附图2所示,移栽锹铲31呈三角形扇面结构,移栽锹铲31的截面呈弧形结构,移栽锹铲31的两侧开设有聚合侧刃311,移栽锹铲31的底端设有切削锥头312,导向翼板32焊接于移栽锹铲31一侧的中部并与移栽锹铲31的侧面相垂直,移栽锹铲31和导向翼板32的表面呈圆滑光面结构,移栽锹铲31和导向翼板32为不锈钢材质构件,防止土壤层的黏附。
44.参考说明书附图5所示,偏振激励器62包括偏振盒621和偏振电机622,偏振电机622固定安装于偏振盒621的内部,偏振电机622的输出端固定套接有偏振块,偏振块为偏心圆盘结构,偏振电机622的输出端电性连接有控制器,用于移栽锹铲31的振动驱动。
45.实施方式具体为:设置振动减阻机构,利用偏振激励器62的电动振动带动移栽锹铲31在下行挖掘的过程中进行高频振动,减小土壤层对锹铲运动的阻力作用,且利用锹铲边缘以及底部的切削刃结构进行切削土壤层以及根茎进一步降低挖掘阻力,提高挖掘效率
和机械转化效能;另外,本发明通过移栽锹铲31下行移动中的有效振动,实现移栽锹铲31内外侧土壤的高频运动接触,使得挖掘切削面振动匀实成光滑面结构,防止土壤与锹铲的黏附,提高该移栽挖掘机构的实用性。
46.快速辅助绿萼梅移栽设备的操作方法,参考说明书附图6和7所示,包括以下步骤:
47.s1.安装与电路接通:将该移栽设备通过第一移栽抱环1和第二移栽抱环2侧边的固定耳端11安装于牵引农机的搭载平台,将液压驱动机构5的输入端与牵引农机的液压驱动机构进行连通,连接偏振激励器62的电源控制电路;
48.s2.测试与频率确定:根据该移栽设备待接触的土壤类型,选定若干块待工作的土壤样本地块,通过液压驱动机构5直接驱动锥形抱铲3下行运动,测量液压驱动机构5的驱动力从而测算锥形抱铲3的下行阻力大小,根据实验所得振动频率与阻力消减线性关系,确定振动减阻机构6所需工作频率,实现锥形抱铲3的有效振动;
49.s3.准备工作:驱动液压驱动机构5进行收缩运动使得各个移栽锹铲31进行张开运动,将第一移栽抱环1和第二移栽抱环2进行张开套接于待移栽绿萼梅树干两侧并回复第一移栽抱环1合第二移栽抱环2的聚合位置,调整设备高度,使得移栽锹铲31底端与地面接触即可;
50.s4.开始与移栽挖掘阶段:启动振动减阻机构6的工作电源带动,通过偏振传导叉63与振动导块331的啮合传动实现移栽锹铲31和导向翼板32的有效振动,通过液压驱动机构5的驱动使得移栽锹铲31下行运动插入土壤,利用偏振电机622的电动振动带动移栽锹铲31在下行挖掘的过程中进行高频振动,减小土壤层对锹铲运动的阻力作用,且利用移栽锹铲31边缘以及底部的聚合侧刃311和切削锥头312进行切削土壤层以及根茎降低挖掘阻力,在移栽锹铲31下行运动的过程中通过移栽锹铲31内外弧面的作用使得移栽锹铲31收土壤层应力作用向内侧聚拢,使得液压驱动机构5和移栽锹铲31整体沿导向滑轨41向内侧滑动聚拢,最终各个移栽锹铲31进行聚拢贴合形成完整的锥形抱铲3将树木底冠以及部分原生土壤包裹在锥形抱铲3的内部;
51.s5.移栽输送阶段:在移栽锹铲31聚拢完成后通过牵引机搭载平台的上升运动,将完整的树木底冠与部分原生土壤进行升高提起,进行搬运移动;
52.s6.移栽结束阶段:在待移栽地点挖掘适合大小的栽培坑,通过牵引农机搭载平台的下降运动将移栽树木准确放入栽培坑内部,启动液压驱动机构5进行回退,带动移栽锹铲31沿树木底冠的土壤层锥面进行上升运动,实现释放,打开第一移栽抱环1和第二移栽抱环2将移栽设备与树木分离,覆土填平栽培坑与树木底冠的缝隙即可。
53.其中,在步骤s1中牵引农机的搭载平台为可升降平台,液压驱动机构的动力与牵引农机的液压动力总成进行连通。
54.其中,在步骤s2中移栽设备与土壤相互作用时,土壤的理化性质决定了移栽设备挖掘组件与土壤接触时阻力的大小,不同的土壤类型,移栽设备的设计参数也不同,经大量测样确定振动频率与阻力消减的线性关系。
55.其中,在步骤s4中移栽锹铲31下行移动中的有效振动使得移栽锹铲31内外侧与土壤的高频运动接触,使得挖掘切削面振动匀实成光滑面结构,防止土壤黏附于移栽锹铲31表面黏附。
56.最后应说明的几点是:首先,在本申请的描述中,需要说明的是,除非另有规定和
限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
57.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
58.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1