一种自动化捕鱼无人机及使用方法与流程
[0001]
本发明属于无人机捕鱼技术领域,具体涉及一种自动化捕鱼无人机及使用方法。
背景技术:
[0002]
传统的捕鱼方式主要为撒网捕鱼和钓鱼两种方式,撒网又名抡网、旋网、手抛网一种用于浅水地区的小型圆锥形网具,用手撒出去,使网口向下,利用坠子将网体快速带入水中,并用与网缘相连的绳索缓慢收回来,使鱼进入网兜中并拉出水面,但是传统的撒网受限于渔船,没有渔船就无法实现高效的捕鱼。
[0003]
公开号为cn109398703a的中国专利公开了一种渔业用具有撒网功能的无人机,包括无人机本体,所述无人机本体主要无人机外壳和降落架组成,所述无人机外壳的底部外壁设置有等距离呈环形分布的缓冲垫,且缓冲垫的数量为四个,所述缓冲垫的底部外壁与降落架之间通过螺栓连接,所述降落架的两侧内壁靠近底部的位置均转动连接有转动轴,且转动轴的外壁位于中间的位置转动连接有滚轮,所述无人机外壳的顶部内壁位于中间的位置设置有电动机,且电动机输出轴的一端设置有螺旋桨。
[0004]
公开号为cn107323667b的中国专利还公开了一种基于物联网的用于捕鱼的智能无人机,包括机体、设置在机体下方的捕鱼机构、设置在捕鱼机构周身的气囊机构、设置在机体上方的角度调节机构、中控机构和设置在角度调节机构上的飞行机构,所述捕鱼机构、气囊机构、角度调节机构均与中控机构电连接;所述角度调节机构包括驱动组件和角度调节组件,所述驱动组件与角度调节组件传动连接,所述驱动组件包括第一电机、第一驱动轴和第一齿轮,所述第一电机通过第一驱动轴与第一齿轮传动连接;所述角度调节组件包括第二齿轮、连杆、移动板和导轨,所述第二齿轮设在第一齿轮的一侧,所述第二齿轮和第一齿轮啮合,所述连杆的一端与第二齿轮同轴设置,所述连杆的另一端和移动板下端固定连接,所述第二齿轮通过连杆与移动板传动连接,所述移动板在导轨上滑动,所述导轨为弧形轨道,所述弧形轨道对应的角度为度,所述弧形轨道的圆心位于第二齿轮的圆心处;当无人机有飞行状态切换到海中航行状态时,第一电机正转启动,第一齿轮随之转动,因为第一齿轮与第二齿轮啮合,故第二齿轮也开始转动,又因为连杆的一端与第二齿轮同轴设置,连杆的另一端和移动板下端固定连接,故连杆带动移动板转动,移动板受力在导轨滑动,设置在移动板上的飞行机构从原来的垂直向上状态变成水平状态。
[0005]
但是,仍然存在下列问题:
[0006]
1.传统捕鱼效率低,捕鱼精准度不高;
[0007]
2.捕鱼操作者的劳动强度较高,无法瞒住日益增长的自动化需求;
[0008]
3.操作不便需要较长时间的操作培训,不利于技术的推广应用。
技术实现要素:
[0009]
针对现有技术中存在的上述不足之处,本发明提供了一种自动化捕鱼无人机,用以解决现有技术传统捕网效率低,捕鱼精准度不高;捕鱼操作者的劳动强度较高,无法瞒住
日益增长的自动化需求;操作不便需要较长时间的操作培训,不利于技术的推广应用等问题。本发明还提供了一种自动化捕鱼无人机的使用方法,方法简单便捷,便于操作人员操作,操作人员可以快速掌握操作方法,从而降低了人力成本低,同时保证了工作人员的工作安全。
[0010]
为了解决上述技术问题,本发明采用了如下技术方案:
[0011]
一种自动化捕鱼无人机,包括挂钩夹爪组件、红外探测组件、无人机主体、渔网框组件和上浮组件,所述挂钩夹爪组件固定连接于无人机主体下部,所述渔网框组件上部与挂钩夹爪组件下部可拆卸连接,所述上浮组件连接于所述渔网框组件下部,所述红外探测组件固定连接于渔网框组件侧部;
[0012]
所述挂钩夹爪组件包括第一安装座、上板、第一夹爪安装座、第一夹爪连接件、第一弯管爪、限位件、第二夹爪安装座、第二气缸和第二夹爪连接件,所述第一安装座下部与上板上表面中部固定连接,所述第一夹爪安装座固定连接于上板一侧,所述第一夹爪安装座下部与第一夹爪连接件上部活动连接,所述第一夹爪连接件下部与第一弯管爪固定连接,所述第二夹爪安装座固定连接于上板一侧,所述第二夹爪安装座下部活动连接于第二夹爪连接件上部,所述第二夹爪连接件下部通过第一弯管爪与该侧的第一夹爪连接件固定连接,所述第二气缸作动筒与第一夹爪连接件活动连接,所述第二气缸缸体与上板下表面固定连接,所述限位件与第一弯管爪固定连接,所述第一夹爪安装座、两个第一夹爪连接件、第一弯管爪、限位件、第二夹爪安装座构成一组夹抓组件,另一组旋转对称分布于第二夹爪连接件另一侧。
[0013]
优选的,所述挂钩夹爪组件还包括第一气缸和第一压板,所述第一气缸上部固定连接于上板下部,所述第一气缸包括第一气缸缸体和第一气缸作动筒,所述第一气缸缸体与第一气缸作动筒活动连接,所述第一气缸作动筒下部与第一压板上部固定连接,该所述第一气缸和所述第一压板构成一组下压组件,所述另一组对称分布于上板另一侧,所述第一压板上靠近限位件的一侧设有避开限位件的凹槽。
[0014]
优选的,所述挂钩夹爪组件上还设有两个饵料投放器,两个所述饵料投放器分别设于挂钩夹爪组件两侧,两个所述饵料投放器均与多根所述第一弯管爪通过管道连接,所述饵料投放器设有储料容器、搅拌机构和送料结构,所述储料容器通过管道与搅拌机构连接,所述送料结构设于搅拌机构侧部,所述送料结构与搅拌机构固定连接,所述送料结构通过管道与第一弯管爪连接,所述第一弯管爪为多个中空管固定连接而成。
[0015]
优选的,所述上浮组件包括压缩体罐、充气浮船、充气口和泄气阀门,所述压缩体罐固定连接于渔网框组件下部,所述渔网框组件下部还固定连接有充气浮船,所述充气浮船上设有充气口和泄气阀门,所述充气口通过管道与压缩体罐连接。
[0016]
优选的,所述压缩体罐包括罐体,压缩液,伸缩管口,出气管口和第一弹簧,所述罐体内部容纳有压缩液,所述罐体口部设有伸缩管口,所述伸缩管口与罐体活动连接,所述伸缩管口下部设有台阶,所述压缩体罐上也设有台阶,所述伸缩管口与压缩体罐台阶之间设有第一弹簧,所述出气管口固定连接于罐体上部,所述出气管口上设有连接口,所述连接口朝外侧。
[0017]
优选的,所述压缩体罐还包括第一舵机,第一舵角和撬杆,所述第一舵机固定连接于罐体上部,所述撬杆活动连接于罐体上部,所述撬杆一侧设有槽口,所述第一舵机上固定
连接有第一舵角,所述第一舵角通过槽口与撬杆滑动连接,所述撬杆连接于伸缩管口上部。
[0018]
优选的,所述渔网框组件包括外框、外网体、第一进网口、连接挂架和浮圈,所述外框呈长方体外形,所述外网体固定连接于外框的上、下、左、右、前和后这六个面,所述第一进网口设于外网体上,所述连接挂架固定连接于外框上部,所述浮圈固定连接与外框上部。
[0019]
优选的,所述红外探测组件包括信号发射器、红外探测单元和连接支杆,所述信号发射器设于红外探测单元一侧,所述连接支杆设于红外探测单元上部,所述连接支杆固定连接于外框上。
[0020]
优选的,所述红外探测组件还包括旋转机构,所述旋转机构固定连接于连接支杆下部,所述旋转机构两侧分别连接有信号发射器和红外探测单元。
[0021]
上述的一种自动化捕鱼无人机的使用方法,包括以下步骤:
[0022]
s1,准备阶段,首先将该自动化捕鱼无人机行驶至渔网框组件上部,并通过挂钩夹爪组件将其勾住,并且向饵料投放器(118)中注入饵料,然后确保压缩体罐内有足够的气压,保证能够向充气浮船内充气,并且检查所有电子仪器这是否能正常工作;
[0023]
s2,投放阶段,接着将该自动化捕鱼无人机行驶至可能有鱼群的位置,接着启动红外探测组件的红外探测单元朝下,即可探测自动化捕鱼无人机下部是否有鱼群,若有鱼群,即可将该自动化捕鱼无人机缓慢下降到水上,接着可以利用投放饵料投放器向渔网框组件投放一定量的饵料,此时该自动化捕鱼无人机即可松开该渔网框组件,其会在浮圈的作用线浮在水面上,接着该自动化捕鱼无人机即可投放另外的渔网框组件,此时红外探测组件的红外探测单元便会旋转朝向渔网框组件,检测内部的鱼群数量,并通过信号发射器发出信号至操作人员的操作面板上;
[0024]
s3,收获阶段,当红外探测组件检测到渔网框组件内有大量鱼群,便可以将自动化捕鱼无人机行驶至该渔网框组件上部,用挂钩夹爪组件缓慢挂住连接挂架,同时快速向充气浮船内充气,带该渔网框组件上浮到水面即可将该自动化捕鱼无人机的螺旋向均旋转90度朝向同一个方向,若该水面地形复杂,直接利用无人机运到操作人员的位置即可。
[0025]
本发明与现有技术相比,具有如下有益效果:
[0026]
本发明的一种自动化捕鱼无人机,连接稳定,结构强度高,便于拆装和检修,操作方便,稳定可靠,使用寿命长,传统捕鱼效率高,捕鱼精准度高;捕鱼操作者的劳动强度较低,能够瞒住日益增长的自动化需求;操作方便,无需要较长时间的操作培训,利于技术的推广应用,挂钩夹爪组件的设置便于将渔网框组件夹起和放下,当准备阶段时,将该挂钩夹爪组件抓住渔网框组件上部的连接挂架,再将该自动化捕鱼无人机行驶至需要捕鱼的水域上方,接着即可缓慢放下该渔网框组件至水下,方便操作机构简单,在收获阶段即可将该动化捕鱼无人机行驶至该渔网框组件的上方,便用挂钩夹爪组件抓住连接挂架,节课行驶至操作人员的位置,同时下方的限位件连接在第一弯管爪内侧,可以起到限制下方渔网框组件左右晃动的效果。
附图说明
[0027]
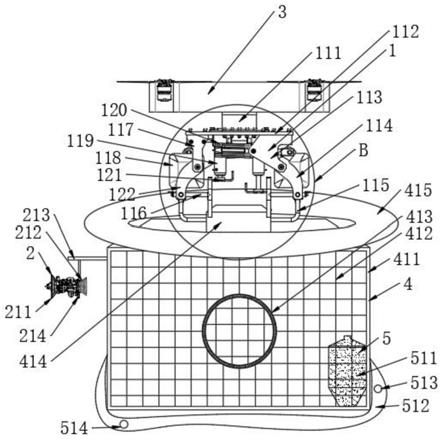
图1为本发明一种自动化捕鱼无人机实施例的侧视结构示意图;
[0028]
图2为图1中b处放大结构示意图;
[0029]
图3为本发明一种自动化捕鱼无人机实施例的挂钩夹爪组件和无人机主体组合体
的正视结构示意图;
[0030]
图4为本发明一种自动化捕鱼无人机实施例的挂钩夹爪组件和无人机主体组合体的立体结构示意图;
[0031]
图5为本发明一种自动化捕鱼无人机实施例的压缩体罐的剖视结构示意图;
[0032]
图6为图5中c出放大结构示意图;
[0033]
附图中涉及到的附图标记有:挂钩夹爪组件1,第一安装座111,上板112,第一夹爪安装座113,第一夹爪连接件114,第一弯管爪115,限位件116,第二夹爪安装座117,饵料投放器118,第一气缸119,第二气缸120,第一压板121,第二夹爪连接件122,红外探测组件2,信号发射器211,红外探测单元212,连接支杆213,旋转机构214,无人机主体3,渔网框组件4,外框411,外网体412,第一进网口413,连接挂架414,浮圈415,上浮组件5,压缩体罐511,罐体511a,压缩液511b,伸缩管口511c,出气管口511d,第一弹簧511e,第一舵机511f,第一舵角511g,撬杆511h,充气浮船512,充气口513,泄气阀门514。
具体实施方式
[0034]
为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
[0035]
实施例一
[0036]
如图1-6所示,一种自动化捕鱼无人机,包括挂钩夹爪组件1、红外探测组件2、无人机主体3、渔网框组件4和上浮组件5,挂钩夹爪组件1固定连接于无人机主体3下部,渔网框组件4上部与挂钩夹爪组件1下部可拆卸连接,上浮组件5连接于渔网框组件4下部,红外探测组件2固定连接于渔网框组件4侧部;
[0037]
挂钩夹爪组件1包括第一安装座111、上板112、第一夹爪安装座113、第一夹爪连接件114、第一弯管爪115、限位件116、第二夹爪安装座117、第二气缸120和第二夹爪连接件122,第一安装座111下部与上板112上表面中部固定连接,第一夹爪安装座113固定连接于上板112一侧,第一夹爪安装座113下部与第一夹爪连接件114上部活动连接,第一夹爪连接件114下部与第一弯管爪115固定连接,第二夹爪安装座117固定连接于上板112一侧,第二夹爪安装座117下部活动连接于第二夹爪连接件122上部,第二夹爪连接件122下部通过第一弯管爪115与该侧的第一夹爪连接件114固定连接,第二气缸120作动筒与第一夹爪连接件114活动连接,第二气缸120缸体与上板112下表面固定连接,限位件116与第一弯管爪115固定连接,第一夹爪安装座113、两个第一夹爪连接件114、第一弯管爪115、限位件116、第二夹爪安装座117构成一组夹抓组件,另一组旋转对称分布于第二夹爪连接件122另一侧。
[0038]
挂钩夹爪组件1的设置便于将渔网框组件4夹起和放下,当准备阶段时,将该挂钩夹爪组件1抓住渔网框组件4上部的连接挂架414,再将该自动化捕鱼无人机行驶至需要捕鱼的水域上方,接着即可缓慢放下该渔网框组件4至水下,方便操作机构简单,在收获阶段即可将该动化捕鱼无人机行驶至该渔网框组件4的上方,便用挂钩夹爪组件1抓住连接挂架414,节课行驶至操作人员的位置,同时下方的限位件116连接在第一弯管爪115内侧,可以起到限制下方渔网框组件4左右晃动的效果。
[0039]
作为优选的方案,挂钩夹爪组件1还包括第一气缸119和第一压板121,第一气缸119上部固定连接于上板112下部,第一气缸119包括第一气缸缸体和第一气缸作动筒,第一
气缸缸体与第一气缸作动筒活动连接,第一气缸作动筒下部与第一压板121上部固定连接,该第一气缸119和第一压板121构成一组下压组件,另一组对称分布于上板112另一侧,第一压板121上靠近限位件116的一侧设有避开限位件116的凹槽。
[0040]
挂钩夹爪组件1设置的第一气缸119和第一压板121,在第一气缸119的作用下,可以将第一压板121向下压,进一步限制了连接挂架414的晃动,结构稳定可靠。
[0041]
作为优选的方案,挂钩夹爪组件1上还设有两个饵料投放器118,两个饵料投放器118分别设于挂钩夹爪组件1两侧,两个饵料投放器118均与多根第一弯管爪115通过管道连接,饵料投放器118设有储料容器、搅拌机构和送料结构,储料容器通过管道与搅拌机构连接,送料结构设于搅拌机构侧部,送料结构与搅拌机构固定连接,送料结构通过管道与第一弯管爪115连接,第一弯管爪115为多个中空管固定连接而成。
[0042]
饵料投放器118可以提高饵料的投放效率,当一个渔网框组件4投放在水下后,可以快速投放饵料,然后投放下一个渔网框组件4,提升了捕鱼效率,同时在饵料投放器118内设置了储料容器、搅拌机构和送料结构,储料容器可以方便灌装饵料,通过搅拌机构的充分搅拌,将饵料中的诱鱼元素充分释放出来,并且通过送料结构快速输送至第一弯管爪115的管道内,并释放到渔网框组件4中,起到诱鱼的效果。
[0043]
作为优选的方案,上浮组件5包括压缩体罐511、充气浮船512、充气口513和泄气阀门514,压缩体罐511固定连接于渔网框组件4下部,渔网框组件4下部还固定连接有充气浮船512,充气浮船512上设有充气口513和泄气阀门514,充气口513通过管道与压缩体罐511连接。
[0044]
上浮组件5可以在该渔网框组件4有较多鱼的情况下,上浮到水面上,压缩体罐511可以向充气浮船512能充气,达到上浮的效果,当该设备使用完之后,可以通过泄气阀门514释放充气浮船512内的气体,压缩体罐511的气体为氮气、二氧化碳等无害气体,对环境没有任何害处,为环境友好型设计。
[0045]
作为优选的方案,压缩体罐511包括罐体511a,压缩液511b,伸缩管口511c,出气管口511d和第一弹簧511e,罐体511a内部容纳有压缩液511b,罐体511a口部设有伸缩管口511c,伸缩管口511c与罐体511a活动连接,伸缩管口511c下部设有台阶,压缩体罐511上也设有台阶,伸缩管口511c与压缩体罐511台阶之间设有第一弹簧511e,出气管口511d固定连接于罐体511a上部,出气管口511d上设有连接口,连接口朝外侧。
[0046]
压缩体罐511为充气浮船512充气,罐体511a起到容纳压缩液511b液体的作用,伸缩管口511c和第一弹簧511e构成了一个可以自动回弹且可以释放罐内气体的作用,出气管口511d通过管道与充气浮船512连接,结构简单,方便操作。
[0047]
实施例二
[0048]
本实施例作为上一实施例的进一步改进,如图1-6所示,一种自动化捕鱼无人机,包括挂钩夹爪组件1、红外探测组件2、无人机主体3、渔网框组件4和上浮组件5,挂钩夹爪组件1固定连接于无人机主体3下部,渔网框组件4上部与挂钩夹爪组件1下部可拆卸连接,上浮组件5连接于渔网框组件4下部,红外探测组件2固定连接于渔网框组件4侧部;
[0049]
挂钩夹爪组件1包括第一安装座111、上板112、第一夹爪安装座113、第一夹爪连接件114、第一弯管爪115、限位件116、第二夹爪安装座117、第二气缸120和第二夹爪连接件122,第一安装座111下部与上板112上表面中部固定连接,第一夹爪安装座113固定连接于
上板112一侧,第一夹爪安装座113下部与第一夹爪连接件114上部活动连接,第一夹爪连接件114下部与第一弯管爪115固定连接,第二夹爪安装座117固定连接于上板112一侧,第二夹爪安装座117下部活动连接于第二夹爪连接件122上部,第二夹爪连接件122下部通过第一弯管爪115与该侧的第一夹爪连接件114固定连接,第二气缸120作动筒与第一夹爪连接件114活动连接,第二气缸120缸体与上板112下表面固定连接,限位件116与第一弯管爪115固定连接,第一夹爪安装座113、两个第一夹爪连接件114、第一弯管爪115、限位件116、第二夹爪安装座117构成一组夹抓组件,另一组旋转对称分布于第二夹爪连接件122另一侧。
[0050]
挂钩夹爪组件1的设置便于将渔网框组件4夹起和放下,当准备阶段时,将该挂钩夹爪组件1抓住渔网框组件4上部的连接挂架414,再将该自动化捕鱼无人机行驶至需要捕鱼的水域上方,接着即可缓慢放下该渔网框组件4至水下,方便操作机构简单,在收获阶段即可将该动化捕鱼无人机行驶至该渔网框组件4的上方,便用挂钩夹爪组件1抓住连接挂架414,节课行驶至操作人员的位置,同时下方的限位件116连接在第一弯管爪115内侧,可以起到限制下方渔网框组件4左右晃动的效果。
[0051]
作为优选的方案,挂钩夹爪组件1还包括第一气缸119和第一压板121,第一气缸119上部固定连接于上板112下部,第一气缸119包括第一气缸缸体和第一气缸作动筒,第一气缸缸体与第一气缸作动筒活动连接,第一气缸作动筒下部与第一压板121上部固定连接,该第一气缸119和第一压板121构成一组下压组件,另一组对称分布于上板112另一侧,第一压板121上靠近限位件116的一侧设有避开限位件116的凹槽。
[0052]
挂钩夹爪组件1设置的第一气缸119和第一压板121,在第一气缸119的作用下,可以将第一压板121向下压,进一步限制了连接挂架414的晃动,结构稳定可靠。
[0053]
作为优选的方案,挂钩夹爪组件1上还设有两个饵料投放器118,两个饵料投放器118分别设于挂钩夹爪组件1两侧,两个饵料投放器118均与多根第一弯管爪115通过管道连接,饵料投放器118设有储料容器、搅拌机构和送料结构,储料容器通过管道与搅拌机构连接,送料结构设于搅拌机构侧部,送料结构与搅拌机构固定连接,送料结构通过管道与第一弯管爪115连接,第一弯管爪115为多个中空管固定连接而成。
[0054]
饵料投放器118可以提高饵料的投放效率,当一个渔网框组件4投放在水下后,可以快速投放饵料,然后投放下一个渔网框组件4,提升了捕鱼效率,同时在饵料投放器118内设置了储料容器、搅拌机构和送料结构,储料容器可以方便灌装饵料,通过搅拌机构的充分搅拌,将饵料中的诱鱼元素充分释放出来,并且通过送料结构快速输送至第一弯管爪115的管道内,并释放到渔网框组件4中,起到诱鱼的效果。
[0055]
作为优选的方案,上浮组件5包括压缩体罐511、充气浮船512、充气口513和泄气阀门514,压缩体罐511固定连接于渔网框组件4下部,渔网框组件4下部还固定连接有充气浮船512,充气浮船512上设有充气口513和泄气阀门514,充气口513通过管道与压缩体罐511连接。
[0056]
上浮组件5可以在该渔网框组件4有较多鱼的情况下,上浮到水面上,压缩体罐511可以向充气浮船512能充气,达到上浮的效果,当该设备使用完之后,可以通过泄气阀门514释放充气浮船512内的气体,压缩体罐511的气体为氮气、二氧化碳等无害气体,对环境没有任何害处,为环境友好型设计。
[0057]
作为优选的方案,压缩体罐511包括罐体511a,压缩液511b,伸缩管口511c,出气管
口511d和第一弹簧511e,罐体511a内部容纳有压缩液511b,罐体511a口部设有伸缩管口511c,伸缩管口511c与罐体511a活动连接,伸缩管口511c下部设有台阶,压缩体罐511上也设有台阶,伸缩管口511c与压缩体罐511台阶之间设有第一弹簧511e,出气管口511d固定连接于罐体511a上部,出气管口511d上设有连接口,连接口朝外侧。
[0058]
压缩体罐511为充气浮船512充气,罐体511a起到容纳压缩液511b液体的作用,伸缩管口511c和第一弹簧511e构成了一个可以自动回弹且可以释放罐内气体的作用,出气管口511d通过管道与充气浮船512连接,结构简单,方便操作。
[0059]
作为优选的方案,压缩体罐511还包括第一舵机511f,第一舵角511g和撬杆511h,第一舵机511f固定连接于罐体511a上部,撬杆511h活动连接于罐体511a上部,撬杆511h一侧设有槽口,第一舵机511f上固定连接有第一舵角511g,第一舵角511g通过槽口与撬杆511h滑动连接,撬杆511h连接于伸缩管口511c上部。
[0060]
第一舵机511f带动第一舵角511g在一定角度内来回运动,并且能够带动撬杆511h运动,撬杆511h的一端可以撬动伸缩管口511c,从而起到控制内部空气的作用,结构简单实用。
[0061]
作为优选的方案,渔网框组件4包括外框411、外网体412、第一进网口413、连接挂架414和浮圈415,外框411呈长方体外形,外网体412固定连接于外框411的上、下、左、右、前和后这六个面,第一进网口413设于外网体412上,连接挂架414固定连接于外框411上部,浮圈415固定连接与外框411上部。
[0062]
渔网框组件4起到了网鱼的效果,当鱼群在渔网框组件4内聚集时,便可以启动内部的第一舵机511f带动第一舵角511g在一定角度内来回运动,并且能够带动撬杆511h运动,撬杆511h的一端可以撬动伸缩管口511c,从而起到控制内部空气,释放到充气浮船512内,当充气浮船512充气后,便可以上浮到水面。
[0063]
作为优选的方案,红外探测组件2包括信号发射器211、红外探测单元212和连接支杆213,信号发射器211设于红外探测单元212一侧,连接支杆213设于红外探测单元212上部,连接支杆213固定连接于外框411上。
[0064]
红外探测组件2在投放阶段,可以检测水下鱼群的位置,便于将该渔网框组件4投放在鱼群较为聚集的位置,增加捕鱼的效率,当该渔网框组件4投放在水下后,可以用该红外探测组件2检测渔网框组件4内部的鱼群聚集状态,便于操作者知道渔网框组件4内部的鱼群聚集状态,进而知道收网的时机。
[0065]
作为优选的方案,红外探测组件2还包括旋转机构214,旋转机构214固定连接于连接支杆213下部,旋转机构214两侧分别连接有信号发射器211和红外探测单元212。
[0066]
旋转机构214可以便于将该红外探测单元212调整到合适的角度,当该自动化捕鱼无人机在投放阶段时,可以将红外探测单元212朝向下方,探测水下的鱼群数量,当该渔网框组件4投放至水下后,便可将该红外探测单元212调整到对准渔网框组件4的位置,便于探测渔网框组件4内部鱼群的状态,便于操作者得知收网时机。
[0067]
实施例二相对于实施例一的优点在于:
[0068]
发明实施例二的第一舵机511f带动第一舵角511g在一定角度内来回运动,并且能够带动撬杆511h运动,撬杆511h的一端可以撬动伸缩管口511c,从而起到控制内部空气的作用,结构简单实用。渔网框组件4起到了网鱼的效果,当鱼群在渔网框组件4内聚集时,便
可以启动内部的第一舵机511f带动第一舵角511g在一定角度内来回运动,并且能够带动撬杆511h运动,撬杆511h的一端可以撬动伸缩管口511c,从而起到控制内部空气,释放到充气浮船512内,当充气浮船512充气后,便可以上浮到水面。红外探测组件2在投放阶段,可以检测水下鱼群的位置,便于将该渔网框组件4投放在鱼群较为聚集的位置,增加捕鱼的效率,当该渔网框组件4投放在水下后,可以用该红外探测组件2检测渔网框组件4内部的鱼群聚集状态,便于操作者知道渔网框组件4内部的鱼群聚集状态,进而知道收网的时机。旋转机构214可以便于将该红外探测单元212调整到合适的角度,当该自动化捕鱼无人机在投放阶段时,可以将红外探测单元212朝向下方,探测水下的鱼群数量,当该渔网框组件4投放至水下后,便可将该红外探测单元212调整到对准渔网框组件4的位置,便于探测渔网框组件4内部鱼群的状态,便于操作者得知收网时机。
[0069]
上述的一种自动化捕鱼无人机的使用方法,包括以下步骤:
[0070]
s1,准备阶段,首先将该自动化捕鱼无人机行驶至渔网框组件上部,并通过挂钩夹爪组件将其勾住,并且向饵料投放器(118)中注入饵料,然后确保压缩体罐内有足够的气压,保证能够向充气浮船内充气,并且检查所有电子仪器这是否能正常工作;
[0071]
s2,投放阶段,接着将该自动化捕鱼无人机行驶至可能有鱼群的位置,接着启动红外探测组件的红外探测单元朝下,即可探测自动化捕鱼无人机下部是否有鱼群,若有鱼群,即可将该自动化捕鱼无人机缓慢下降到水上,接着可以利用投放饵料投放器向渔网框组件投放一定量的饵料,此时该自动化捕鱼无人机即可松开该渔网框组件,其会在浮圈的作用线浮在水面上,接着该自动化捕鱼无人机即可投放另外的渔网框组件,此时红外探测组件的红外探测单元便会旋转朝向渔网框组件,检测内部的鱼群数量,并通过信号发射器发出信号至操作人员的操作面板上;
[0072]
s3,收获阶段,当红外探测组件检测到渔网框组件内有大量鱼群,便可以将自动化捕鱼无人机行驶至该渔网框组件上部,用挂钩夹爪组件缓慢挂住连接挂架,同时快速向充气浮船内充气,带该渔网框组件上浮到水面即可将该自动化捕鱼无人机的螺旋向均旋转90度朝向同一个方向,若该水面地形复杂,直接利用无人机运到操作人员的位置即可。
[0073]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本申请给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本申请的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1