一种红花采摘并联机器人
1.本发明设计了一种红花采摘并联机器人,适用于红花花丝的采摘收集,属于农业智能机械采摘收获领域。
背景技术:
2.红花又名红蓝花,是一种集药用、油料为一体的特种经济作物,具有活血通经,散瘀止痛的功效。近年来,红花作为名贵中草药材被大量适用于医药、食品添加剂、彩妆和染料等众多领域,促进了红花的广泛种植,尤其以新疆地区为主的种植面积逐年增长。
3.但目前,红花采收基本依靠大量人工,对采收效率造成了极大的影响,且红花采收时间集中在夏季,与新疆其他经济作物采收时间重合,寻找采摘工人难度大,难以实现经济时效的采收效果。因此,与逐年上涨的种植量相比,采收无法达到预期效果,严重影响了红花种植给农户带来的经济效益,打击了农户的种植积极性。可见,红花采收问题已经是迫在眉睫,实现红花采摘自动化、机械化是大力发展红花产业的必要条件之一。
技术实现要素:
4.为了解决上述问题,本发明提出一种红花采摘并联机器人,目的是为了提供一种可以高效、快速、精准采摘红花的机械,促进了红花产业的发展。
5.一种红花采摘并联机器人,包括行走装置、并联机械臂装置、图像采集装置、采摘装置、花丝收集装置和控制装置。所述行走装置位于机架的下方,所述并联机械臂装置位于机架的中间空格处,所述采摘装置位于并联机械臂装置的下方,所述图像采集装置位于采摘装置的下方,所述花丝收集装置位于机架和行走装置的上方,所述控制装置位于机架的上方。
6.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的行走装置包括机架、电机轮和万向轮,车轮和机架之间通过螺栓配合连接,电机轮分别安装在机架前方左右各一个,万向轮分别安装在机架后方左右各一个,机架的高度高于红花,机架左右车轮分别支撑着机架,并横跨在红花种植行上方。
7.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的并联机械臂装置包括第一主动臂、第二主动臂、第一从动臂和第二从动臂。其中第一主动臂通过转接头连接第一从动臂,第二主动臂通过转接头连接第二从动臂,第一从动臂和第二从动臂通过转接头和采摘装置连接,整个并联机械臂装置位于机架中间空格处,保证在整个红花行宽内都能实现采摘作业。
8.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的图像采集装置包括双目摄像机和相机机架,双目摄像机通过相机机架安装在并联机械臂末端的采摘头下方,工作过程中通过双目摄像机对红花进行拍照,从照片中获取红花的位置信息。
9.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的采摘装置包括采摘头、电机、曲柄滑块机构、第一刀片和第二刀片,其中第一刀片为动刀片,第二刀片为定
刀片。
10.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的采摘头包括上下两端盖并通过紧定螺钉连接,上端盖开有圆孔凹槽,圆孔凹槽上方用于安装输送软管,下方安装第二刀片,下端盖在与上端盖圆孔凹槽相同位置开有输花孔并设有锥度,用于红花花苞的导向和固定。
11.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的曲柄滑块机构包括曲柄圆盘、曲柄连杆、滑块和导向槽,第一刀片固定在滑块上方,当电机启动时,带动曲柄圆盘和曲柄连杆运动,曲柄连杆带动滑块在导向槽中做定向往复运动,由于第一刀片固定在滑块上方,第二刀片固定在圆孔凹槽下方,第一刀片随着滑块做往复切割运动,从而实现对红花的快速往复切割。
12.更进一步地,所述的一种红花采摘并联机器人,其特征在于所述的花丝收集装置包括输送软管、吸风机和花丝收集箱,输送软管一端与采摘头上方的圆孔凹槽连接,连接方式采用软管环箍连接紧固,另一端与花丝收集箱连接,其中输送软管为可伸缩软管,随着采摘装置的运动进行自由伸缩,可防止与并联机械臂装置发生干涉,也可避免影响采摘头的正常工作。
13.本发明的工作过程如下:红花采摘并联机器人机架分布在红花植株行间空隔处,电机轮由控制系统控制并带动机架自动前进移动,到达指定位置后停住,再由图像采集装置中的双目摄像机拍照并对红花坐标位置进行分析,最后由控制系统将坐标位置信息转变为两个步进电机轴的转动角度,并由并联机械臂控制系统控制机械臂带动采摘头到达指定位置,花丝通过输花口进入到剪切室,采摘头电机运行带动曲柄连杆机构做往复运动,对花丝进行剪切,伴随花丝收集装置的吸风作业,将剪切完的花丝吸送到花丝收集箱,进而完成红花花丝的采摘和收集整个工作过程。
14.相较目前的红花采摘机械,本发明的有益效果是:红花花丝采摘更加的机械化、自动化,提高了生产效率,全程不再需要人工的参与,完全解放了劳动力,满足红花采摘的需求。
附图说明
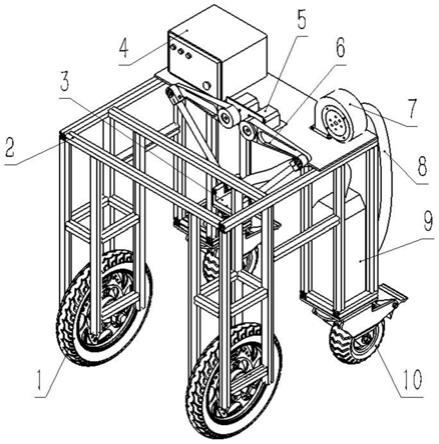
15.图1为本发明机构示意图图2为本发明并联机械臂结构示意图图3为本发明采摘头内部结构示意图图4为本发明曲柄滑块机构示意图图中:1、电机轮;2、机架;3、采摘装置;4、控制系统;5、步进电机;6、并联机械臂装置;7、吸风机;8、输送软管;9、花丝收集室;10、万向轮;11、双目摄像机;12、相机架;13、采摘头;14、第一从动臂;15、第一主动臂;16、固定平台;17、第二主动臂;18、转接头;19、第二从动臂;20、电机;21、下端面;22、曲柄圆盘;23、曲柄连杆;24、滑块;25、滑槽;26、输花孔;27、第一刀片;28、第二刀片;29、圆孔凹槽;30、上端盖。
具体实施方式
16.参照图1-4所示,本发明提供了一种实施例:一种红花采摘并联机器人,包括行走装置、并联机械臂装置(5)、图像采集装置、采摘装置(3)、花丝收集装置和控制装置(4),行走装置位于车体的下方,包括机架(2)、两个电机轮(1)和万向轮(10),车轮和机架(2)之间通过螺栓配合连接,电机轮(1)分别安装在机架(2)前方左右各一个,万向轮(10)分别安装在机架(2)后方左右各一个,机架(2)的高度高于红花,机架(2)左右车轮分别支撑着机架(2),并横跨在红花种植行上方,并联机械臂装置(5)位于机架(2)的中间空格处,包括步进电机(16)、第一主动臂(15)、第二主动臂(17)、第一从动臂(14)和第二从动臂(19),其中第一主动臂(15)通过转接头(18)连接第一从动臂(14),第二主动臂(15)通过转接头(18)连接第二从动臂(19),第一从动臂(14)和第二从动臂(19)通过转接头(18)与采摘装置(3)连接,图像采集装置位于采摘装置(3)的下方,包括双目摄像机(11)和相机机架(12),双目摄像机(11)通过相机机架(12)安装在并联机械臂末端的采摘头(13)下方,工作过程中通过双目摄像机(11)对红花进行拍照,从照片中获取红花的位置信息,采摘装置(3)位于并联机械臂装置(5)的下方,包括采摘头(13)、电机(20)、曲柄滑块机构、第一刀片(27)和第二刀片(28),其中第一刀片(27)为动刀片,第二刀片(28)为定刀片,花丝收集装置位于机架(2)和行走装置的上方,包括输送软管(8)、吸风机(7)和花丝收集箱(9),输送软管(8)一端与采摘头(13)上方的圆孔凹槽(29)连接,连接方式采用软管环箍紧固连接,另一端与花丝收集箱(9)连接,其中输送软管(8)为可伸缩软管,随着采摘装置(3)的运动进行自由伸缩,可防止与并联机械臂装置(5)发生干涉,也可避免了影响采摘头(13)的正常工作。控制装置(4)位于机架(2)的上方,实现对整个机器人行走和采摘的控制过程。
17.本实施中:采摘头(13)包括上下两端盖并通过紧定螺钉连接,上端盖(30)开有圆孔凹槽(29),圆孔凹槽(29)上方用于安装输送软管(8),下方安装有第二刀片(28),下端盖(21)在与上端盖圆孔凹槽(29)相同位置开有输花孔(26)并设有锥度,用于红花花苞的导向和固定,曲柄滑块机构包括曲柄圆盘(22)、曲柄连杆(23)、滑块(24)和导向槽(25),第一刀片(27)固定在滑块(24)上方,当电机(20)启动时,带动曲柄圆盘(22)和曲柄连杆(23)运动,曲柄连杆(23)带动滑块(24)在导向槽(25)中做定向往复运动,由于第一刀片(27)固定在滑块(24)上方,第二刀片(28)固定在圆孔凹槽(29)下方,第一刀片(27)随着滑块(24)做往复切割运动,从而实现对红花的快速往复切割。
18.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1