一种全自动砍菜套网一体机的制作方法
[0001]
本发明涉及农业设备技术领域,特别设计一种全自动砍菜套网一体机。
背景技术:
[0002]
随着科学的进步,农业机械化的发展,传统的人工砍菜套网已经跟不上农业快速发展的需求,目前,蔬菜的收割和套网基本都是由人工操作,速度较慢,费时费力,增加成本,而且人工砍菜较危险,容易受伤,因此,需要发明一种可以代替人工进行快速砍菜套网的机器。
[0003]
技术实现要素:
[0004]
针对上述技术问题,本发明提供了一种全自动砍菜套网一体机,通过砍菜机构将砍下的蔬菜放入套网机构中;将机器开入菜地,通过砍菜机构对准蔬菜,菜刀张开,将菜在包裹在菜刀内,将菜砍下完成了蔬菜的收割;通过砍菜机构将蔬菜放入投菜孔内,进行套网,套网后的蔬菜滚到传送带上掉入菜框内,完成了蔬菜的套网和收集,节省了人力节约了成本;通过套网机构移动到取网孔内进行取网,然后继续给菜套网,如此往复,实现给菜套网的动作,无需人工手动套网,节省了套网时间,提高了工作效率。
[0005]
本发明所使用的技术方案是:一种全自动砍菜套网一体机,包括外壳、砍菜机构和套网机构; 所述砍菜机构转动安装在外壳的前端;所述套网机构安装在外壳的内部;通过砍菜机构将砍下的蔬菜放入套网机构中;所述的外壳包括车壳底部、移动轮、前壳、内部支撑柱、车壳上部、后托板、传送带、皮带轮a、投菜孔和取网孔;所述的车壳底部是长方形板子,车壳底部下面安装有移动轮;前壳是内部为空的箱子,前壳固定安装在车壳底部的前端面;内部支撑柱下端固定安装在车壳底部上,内部支撑柱的上端面与车壳上部的下端面固定连接,内部支撑柱内部有电机,电机带动皮带轮a转动,进而带动传送带转动;后托板固定安装在靠后位置的两个内部支撑柱之间;皮带轮a有两个,前面的皮带轮a转动安装在前面的两个内部支撑柱之间,后面的皮带轮a转动安装在后面的两个内部支撑柱之间;传送带包覆皮带轮a;投菜孔和取网孔设置于车壳上部上。
[0006]
优选地,所述的砍菜机构包括前固定架、同步电机、蜗杆、蜗轮、前电缸、上支杆、步进电机、皮带轮b、提拉带、皮带轮c、控制刀杆、固定杆、伸缩细杆、固定细杆、刀外壳、壳内斜面、探头和菜刀;所述的前固定架是固定安装在前壳内;同步电机固定安装在前固定架侧面,同步电机的电机轴与蜗杆固定连接,蜗杆与蜗轮相互啮合,蜗轮的转轴下端转动安装在前壳的内部底板上;前电缸的缸体底端固定安装在蜗轮上面,前电缸的活塞杆端与上支杆的下端面固定连接;步进电机固定安装在上支杆的侧端面上,步进电机的电机轴与皮带轮b固定连接,皮带轮b转动安装在上支杆的侧面;皮带轮c转动安装在上支杆的靠前位置的侧面;提拉带的一端固定连接在控制刀杆上,提拉带的带身环绕在皮带轮b和皮带轮c上,提拉
带的另一端与固定细杆固定连接;控制刀杆活动安装在刀外壳中间的孔中;固定杆的上端与上支杆的下端面固定连接,固定杆的下端与刀外壳的上端面固定连接;伸缩细杆固定安装在上支杆靠前位置的下端面,伸缩细杆的下端与探头固定连接;固定细杆固定安装伸缩细杆的套筒外侧;刀外壳是内部空心结构,刀外壳内部固定安装有壳内斜面,壳内斜面的内侧是斜面;菜刀活动安装在刀外壳内,菜刀的上端与控制刀杆固定连接。
[0007]
优选地,所述的套网机构包括滑轨、滑轨电机、丝杠、滑块、后电缸、限制架、竖撑板、伞撑架、固伞柱、防震盘、防震弹簧、动作杆、收缩杆和收缩弹簧;所述的滑轨固定安装在车壳底部的上端面;滑轨电机固定安装在滑轨的侧端面,滑轨电机的电机轴与丝杠的一端固定连接;滑块滑动安装在滑轨内,滑块与丝杠通过螺纹连接;后电缸的缸体底端固定安装在滑块的上端面,后电缸的活塞杆端与空心杆的下端固定连接;限制架固定安装在车壳上部的下端面,限制架对准投菜孔;竖撑板固定安装在伞撑架的外端;伞撑架安装在后电缸的活塞杆端;固伞柱固定安装在伞撑架的上面环中;防震弹簧下端固定安装在固伞柱上,防震弹簧的上端与防震盘固定连接;动作杆滑动安装在空心杆内,动作杆的下端设有斜面;收缩弹簧的一端与收缩杆连接,收缩弹簧的另一端与空心杆外侧连接,收缩弹簧内有小连杆,小连杆一端与收缩杆相连,另一端与动作杆下端斜面相连;空心杆的下端固定安装在后电缸的活塞杆端,空心杆的上端固定安装在固伞柱内,空心杆中间位置外侧设有若干凹槽。
[0008]
本发明与现有技术相比的有益效果是:1.本设备在使用时,将外壳开入菜地,通过同步电机带动蜗杆转动使刀外壳对准蔬菜,通过步进电机带动皮带轮b转动,从而带动提拉带下放固定细杆,进而带动探头探测菜头,当探测到符合标准的菜时,步进电机反向转动,控制刀杆向下移动,菜刀张开,将菜在包裹在菜刀内,向上拉拽控制刀杆将蔬菜拉到刀外壳内,完成了蔬菜的收割,节省了收割的时间,大大提高了砍菜效率;2.通过同步电机启动,使刀外壳移动到投菜孔上方,将蔬菜放入投菜孔内,蔬菜接触动作杆,使原本压缩收紧的伞撑架下端向下移动,进而使被撑开的竖撑板向内收缩,同时后电缸活塞杆迅速下移,菜被网包裹住也向下移动,受限制架斜面的阻挡滚到传送带上,通过传送带的传输,向外壳的后端移动, 进而掉入预先放置在外壳尾部的菜框内,完成了蔬菜的套网和收集,节省了人力节约了成本,防止了菜头的损坏;3.后电缸带动竖撑板移动到限制架的下方,滑轨电机启动,带动滑块移动,进而带动后电缸及上面的机构移动,当滑块移动到取网孔正下方时,通过后电缸的活塞杆推动使竖撑板进入取网孔中,拿取一个网,随后,使套着网的竖撑板移动到投菜孔的正下方,等待给菜套网,如此往复,实现给菜套网的动作,无需人工手动套网,节省了套网时间,提高了工作效率。
[0009]
附图说明
[0010]
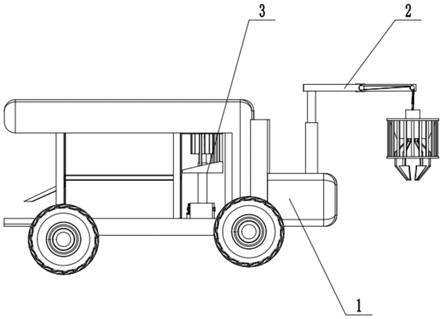
图1-3为本发明的整体结构示意图。
[0011]
图4、图5为本发明的外壳结构示意图。
[0012]
图6-8为本发明的砍菜机构的结构示意图。
[0013]
图9为本发明的套网机构结构示意图。
[0014]
图10为本发明的套网机构的部分结构示意图。
[0015]
图11为本发明的套网机构的部分的内部结构示意图。
[0016]
图12为本发明的套网机构的部分内部的a1处局部放大结构示意图。
[0017]
附图标号1-外壳;2-砍菜机构;3-套网机构;101-车壳底部;102-移动轮;103-前壳;104-内部支撑柱;105-车壳上部;106-后托板;107-传送带;108-皮带轮a;109-投菜孔;110-取网孔;201-前固定架;202-同步电机;203-蜗杆;204-蜗轮;205-前电缸;206-上支杆;207-步进电机;208-皮带轮b;209-提拉带;210-皮带轮c;211-控制刀杆;212-固定杆;213-伸缩细杆;214-固定细杆;215-刀外壳;216-壳内斜面;217-探头;218-菜刀;301-滑轨;302-滑轨电机;303-丝杠;304-滑块;305-后电缸;306-限制架;307-竖撑板;308-伞撑架;309-固伞柱;310-防震盘;311-防震弹簧;312-动作杆;313-收缩杆;314-收缩弹簧;315-空心杆。
[0018]
具体实施方式
[0019]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员能够在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
[0020]
在本发明的描述中,需要说明的是,术语“上”、“下”、
ꢀ“
前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0021]
请参阅图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12所示,一种全自动砍菜套网一体机,包括外壳1、砍菜机构2和套网机构3;砍菜机构2转动安装在外壳1的前端;套网机构3安装在外壳1的内部;通过砍菜机构2将砍下的蔬菜放入套网机构3中;外壳1包括车壳底部101、移动轮102、前壳103、内部支撑柱104、车壳上部105、后托板106、传送带107、皮带轮a108、投菜孔109和取网孔110;车壳底部101是长方形板子,车壳底部101下面安装有移动轮102;前壳103是内部为空的箱子,前壳103固定安装在车壳底部101的前端面;内部支撑柱104下端固定安装在车壳底部101上,内部支撑柱104的上端面与车壳上部105的下端面固定连接,内部支撑柱104内部有电机,电机带动皮带轮a108转动,进而带动传送带107转动;后托板106固定安装在靠后位置的两个内部支撑柱104之间;皮带轮a108有两个,前面的皮带轮a108转动安装在前面的两个内部支撑柱104之间,后面的皮带轮a108转动安装在后面的两个内部支撑柱104之间;传送带107包覆皮带轮a108;投菜孔109和取网孔110设置于车壳上部105上。
[0022]
本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,砍菜机构2包括前固定架201、同步电机202、蜗杆203、蜗轮204、前电缸205、上支杆206、步进电机207、皮带轮b208、提拉带209、皮带轮c210、控制刀杆211、固定杆212、伸缩细杆213、固定细杆214、刀外壳215、壳内斜面216、探头217和菜刀218;前固定架201是固定安装在前壳103
内;同步电机202固定安装在前固定架201侧面,同步电机202的电机轴与蜗杆203固定连接,蜗杆203与蜗轮204相互啮合,蜗轮204的转轴下端转动安装在前壳103的内部底板上;前电缸205的缸体底端固定安装在蜗轮204上面,前电缸205的活塞杆端与上支杆206的下端面固定连接;步进电机207固定安装在上支杆206的侧端面上,步进电机207的电机轴与皮带轮b208固定连接,皮带轮b208转动安装在上支杆206的侧面;皮带轮c210转动安装在上支杆206的靠前位置的侧面;提拉带209的一端固定连接在控制刀杆211上,提拉带209的带身环绕在皮带轮b208和皮带轮c210上,提拉带209的另一端与固定细杆214固定连接;控制刀杆211活动安装在刀外壳215中间的孔中;固定杆212的上端与上支杆206的下端面固定连接,固定杆212的下端与刀外壳215的上端面固定连接;伸缩细杆213固定安装在上支杆206靠前位置的下端面,伸缩细杆213的下端与探头217固定连接;固定细杆214固定安装伸缩细杆213的套筒外侧;刀外壳215是内部空心结构,刀外壳215内部固定安装有壳内斜面216,壳内斜面216的内侧是斜面;菜刀218活动安装在刀外壳215内,菜刀218的上端与控制刀杆211固定连接。
[0023]
本发明实施例的一个可选实施方式中,除与上一个实施例相同的零件外,套网机构3包括滑轨301、滑轨电机302、丝杠303、滑块304、后电缸305、限制架306、竖撑板307、伞撑架308、固伞柱309、防震盘310、防震弹簧311、动作杆312、收缩杆313和收缩弹簧314;滑轨301固定安装在车壳底部101的上端面;滑轨电机302固定安装在滑轨301的侧端面,滑轨电机302的电机轴与丝杠303的一端固定连接;滑块304滑动安装在滑轨301内,滑块304与丝杠303通过螺纹连接;后电缸305的缸体底端固定安装在滑块304的上端面,后电缸305的活塞杆端与空心杆315的下端固定连接;限制架306固定安装在车壳上部105的下端面,限制架306对准投菜孔109;竖撑板307固定安装在伞撑架308的外端;伞撑架308安装在后电缸305的活塞杆端;固伞柱309固定安装在伞撑架308的上面环中;防震弹簧311下端固定安装在固伞柱309上,防震弹簧311的上端与防震盘310固定连接;动作杆312滑动安装在空心杆315内,动作杆312的下端设有斜面;收缩弹簧314的一端与收缩杆313连接,收缩弹簧314的另一端与空心杆315外侧连接,收缩弹簧314内有小连杆,小连杆一端与收缩杆313相连,另一端与动作杆312下端斜面相连;空心杆315的下端固定安装在后电缸305的活塞杆端,空心杆315的上端固定安装在固伞柱309内,空心杆315中间位置外侧设有若干凹槽。
[0024]
工作原理:本设备在使用时,首先将外壳1开入菜地,通过同步电机202带动蜗杆203转动,从而带动蜗轮204转动,进而带动前电缸205转动,使刀外壳215对准蔬菜,通过步进电机207带动皮带轮b208逆时针转动,从而带动提拉带209下放固定细杆214,使伸缩细杆213向下移动,进而带动探头217向下移动,探头217探测菜头,如果菜头不符合被砍标准,机器移动到下一棵菜继续探测,当探测到符合标准的菜时,步进电机207反向转动,使探头217上移,控制刀杆211向下移动,菜刀218张开,将菜在包裹在菜刀218内,步进电机207逆时针转动,带动提拉带209向上拉拽控制刀杆211使菜刀218在壳内斜面216的作用下收缩上移,将蔬菜拉到刀外壳215内;下一步,通过同步电机202启动,带动蜗杆203转动,进而带动蜗轮204转动,进而带动前电缸205转动,使刀外壳215移动到投菜孔109上方,将蔬菜放入投菜孔109内。蔬菜接触动作杆312,使其下移,进而使动作杆312作用于与收缩杆313内部相连的小斜面,使斜面向内移动,带动收缩杆313向内移动,从而松开对伞撑架308下端的固定,从而使原本压缩收紧的伞
撑架308下端向下移动,进而使被撑开的竖撑板307向内收缩,同时后电缸305活塞杆迅速下移,菜被网包裹住也向下移动,受限制架306斜面的阻挡滚到传送带107上,通过传送带107的传输,向外壳1的后端移动, 进而掉入预先放置在外壳1尾部的菜框内;后电缸305的活塞杆下移从而带动竖撑板307移动到限制架306的下方,滑轨电机302启动,带动丝杠303转动,进而带动滑块304移动,进而带动后电缸305及上面的机构移动,当滑块304移动到取网孔110正下方时,通过后电缸305的活塞杆推动使竖撑板307进入取网孔110中,拿取一个网,随后,后电缸305的活塞杆下移,带动整体的套网设备下移,下移到一定的位置后,滑轨电机302反向转动,使套着网的竖撑板307移动到投菜孔109的正下方,然后,后电缸305 的活塞杆上移,将套着网的竖撑板307推动到投菜孔109内,等待给菜套网,如此往复,实现给菜套网的动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1