一种果园智能喷药系统及方法与流程
1.本发明涉及农具技术领域,具体涉及一种果园智能喷药系统及方法。
背景技术:
2.我国水果产量基世界前茅,而果园种植是我国水果产业的主要形式。随着自动化、信息化、智能化成为农业生产和农机装备发展的必然趋势。
3.然而,现如今我国的果园施药技术相对落后,大多数还停留在背负式手动施药的状态,人工喷药存在许多不利因素:(1)药物对人体有害,会引起人体的潜在的病变危害。(2)喷药效率低下,人工喷药不仅消耗体力,更耽误时间。(3)药物利用率低,人工喷药会造成喷药不均匀,药物滴漏等问题,导致药物的浪费。虽然有一些机械喷药装置应用在果园喷药方面,但这些喷药装置存在以下弊端:(1)需要依靠人为控制,不能够自主实现喷药全过程;(2)喷药方式单一,导致药物大量浪费。
4.因此,如何在果园实现针对性的全自动喷药,成为了本领域技术人员急需解决的问题。
技术实现要素:
5.针对上述现有技术的不足,本发明实际解决的技术问题为:如何在果园实现针对性的全自动喷药。
6.为了解决上述技术问题,本发明采用了如下的技术方案:一种果园智能喷药系统,包括控制端及喷药车;喷药车包括移动装置,以及安装在移动装置上的驱动装置、定位装置、探测装置和喷洒装置;其中:控制端与驱动装置通信连接,用于向驱动装置发送用户输入的控制命令进而控制喷药车实现自动喷药;驱动装置分别与定位装置、探测装置、喷洒装置及移动装置电连接;喷洒装置包括多个朝向果树设置的高度不同的喷头,探测装置包括多个朝向果树设置的高度不同的距离探测器,喷头与探测器一一对应,喷头与距离探测器通过与驱动装置电连接的距离调整装置安装在移动装置上,距离调整装置能够调整探测装置及喷洒装置与果树的距离,进而调整喷头及距离探测器与果树的距离。
7.优选地,移动装置为履带式移动装置。
8.优选地,距离探测器与喷药车前端的距离小于喷头与喷药车前端的距离。
9.优选地,喷药车还包括朝向喷药车前端设置的与驱动装置电连接的全景图像采集装置,控制端包括用于显示全景图像采集装置采集的全景图像的显示装置。
10.优选地,果园智能喷药系统还包括与控制端电连接的树冠扫描雷达。
11.一种果园智能喷药方法,所述果园智能喷药方法利用上述的果园智能喷药系统实现,包括如下步骤:s1、控制端向驱动装置发送全自动喷药命令,喷药车开启全自动喷药模式;s2、移动装置基于定位装置获取的位置信息按照预设轨迹前进;
s3、到达喷药区域后,距离探测器采集与果树在对应高度上的距离;s4、驱动装置判断距离探测器与果树在对应高度上的距离是否在预设范围内;s5、当距离探测器与果树在对应高度上的距离在预设范围内时,则对应的喷头喷药;s6、当距离探测器与果树在对应高度上的距离在预设范围外时,距离调整装置调整探测装置及喷洒装置与果树的距离,使距离探测器与果树在对应高度上的距离在预设范围内。
12.优选地,所述果园智能喷药系统中,距离探测器与喷药车前端的距离小于喷头与喷药车前端的距离;所述果园智能喷药方法中,距离探测器与果树在对应高度上的距离在预设范围内时,移动装置前进预设距离后,对应的喷头开始喷药,预设距离为距离探测器与喷药车前端的距离和喷头与喷药车前端的距离的距离差。
13.优选地,所述果园智能喷药系统中,控制端包括显示装置;所述果园智能喷药方法包括:控制端向驱动装置发送半自动喷药命令及喷头选择指令时,喷药车开启半自动喷药模式并确定被选择的喷头,与被选择的喷头对应的距离探测器采集与果树在对应高度上的距离,并通过显示装置显示;控制端向驱动装置发送确认指令,移动装置基于定位装置获取的位置信息按照预设轨迹前进,被选择的喷头开始喷药;控制端向驱动装置发送手动喷药命令及喷头选择指令时,喷药车开启手动喷药模式,并确定被选择的喷头,与被选择的喷头对应的距离探测器采集与果树在对应高度上的距离,并通过显示装置显示;控制端向驱动装置发送确认指令,被选择的喷头开始喷药,移动装置停止前进。
14.优选地,所述果园智能喷药系统中,喷药车还包括朝向喷药车前端设置的与驱动装置电连接的全景图像采集装置;所述果园智能喷药方法还包括:全景图像采集装置采集全景图像发送至驱动装置,驱动装置将全景图像发送至控制端并通过显示装置显示全景图像。
15.优选地,果园智能喷药系统还包括与控制端电连接的树冠扫描雷达;果园智能喷药方法中,在喷药前,利用树冠扫描雷达对果园中的果树进行树冠扫描并建模计算树冠体积,喷药时,基于树冠体积确定每颗果树的喷药量,并基于确定的喷药量进行喷药。
16.综上所述,本发明与现有技术相比具有以下优点:(1)喷药车可实现路径的自动规划,并自动调节喷头与果树的距离,使喷药距离适中在预设范围内,保证了有效喷药,避免了药液的浪费。与现有技术相比,可实现果园高效、低成本的全自动喷药。
17.(2)针对果园的丘陵山区地形,优选采用履带式的移动装置,可以在最大坡度为15
°
的地形下前进,保证喷药系统的正常运行。
18.(3)采用前后间隔设置距离探测器与喷头,可以使距离探测器在喷头正对目标之前确定距离,进而预先进行距离的调整。在喷药车前进预设距离的这段时间内,可将与果树在对应高度上的距离调整到预设范围内,无需喷药车停止前进或喷头停止喷药,也能够实现药液的高效利用,提高了喷药效率。
19.(4)通过全景图像采集装置采集喷药现场图像,工作人员可通过控制端远程掌控
喷药情况,并进行远程控制。
20.(5)除了全自动喷药模式外,工作人员还可通过控制端进行半自动控制或手动控制,进而实现果园的局部精准喷药。
21.(6)在喷药前进行每颗果树的树冠建模,确定每颗果树的喷药量,这样,在保证喷药效果的情况下,能够更加高效的利用药液。
附图说明
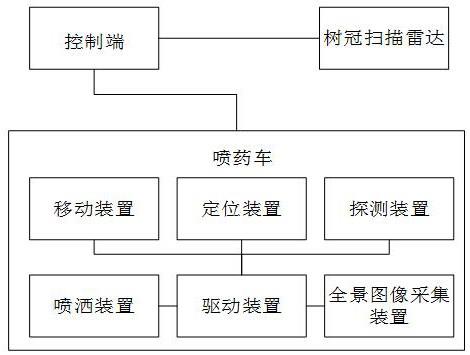
22.为了使发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:图1为本发明公开的一种果园智能喷药系统的一种具体实施方式的结构框图;图2为本发明公开的一种果园智能喷药系统的局部正视图;图3为本发明公开的一种果园智能喷药系统的局部侧视图;图4为本发明公开的一种果园智能喷药方法中控制端的控制界面示例图。
具体实施方式
23.下面结合附图对本发明作进一步的详细说明。
24.如图1所示,本发明公开了一种果园智能喷药系统,包括控制端及喷药车;喷药车包括移动装置,以及安装在移动装置上的驱动装置、定位装置、探测装置和喷洒装置;其中:控制端与驱动装置通信连接,用于向驱动装置发送用户输入的控制命令进而控制喷药车实现自动喷药;驱动装置分别与定位装置、探测装置、喷洒装置及移动装置电连接;喷洒装置包括多个朝向果树设置的高度不同的喷头2,探测装置包括多个朝向果树设置的高度不同的距离探测器1,喷头2与探测器一一对应,喷头2与距离探测器1通过与驱动装置电连接的距离调整装置安装在移动装置上,距离调整装置能够调整探测装置及喷洒装置与果树的距离,进而调整喷头2及距离探测器1与果树的距离。
25.本发明中,移动装置可采用轮式、轨道式、履带式等多种形式的移动装置。定位装置可采用gps定位或采用图像定位。探测器可以为激光测距仪或超声波测距仪等。驱动装置可对每个喷头2进行独立控制,控制每个喷头2的开闭和流量等,具体的,可为每个喷头2设置一个独立的电磁阀用来实现对喷头2的独立控制;此外,每个喷头2可单独配置一个液压泵,用于控制喷头2压力,进而调节喷头2的喷药距离。液压泵和药罐可置于移动装置上,通过管道与每个喷头2联通。如图2所示,本发明中,可设置两组探测装置和喷洒装置,分别朝喷药车的左右两侧设置,距离调整装置可采用沿喷药车宽度方向设置的滑轨或推杆等装置,这样喷药车可以在两排果树之间前进,同时完成两排果树的喷药。
26.采用上述果园智能喷药系统实现果园全自动喷药的方法如下:s1、控制端向驱动装置发送全自动喷药命令,喷药车开启全自动喷药模式;本发明中,控制端可以是电脑、移动终端或固定安装在喷药车上的控制终端等,通过有线或无线的方式与喷药车的驱动装置通信连接,驱动装置可接收控制端的命令并控制喷药车工作,还可将喷药车工作状况中的数据发送至控制端。
27.s2、移动装置基于定位装置获取的位置信息按照预设轨迹前进;本发明中,定位装置能够获取喷药车当前的位置,当进入全自动喷药模式后,驱动
装置可根据定位装置提供的位置信息以及果园的地图信息(果园地图信息可通过现有技术预先采集,之后可预存在驱动装置中,也可以由驱动装置从控制端中调用)完成喷药路径的规划。定位及路径规划可通过现有技术实现,在此不再赘述。
28.s3、到达喷药区域后,距离探测器1采集与果树在对应高度上的距离;s4、驱动装置判断距离探测器1与果树在对应高度上的距离是否在预设范围内;s5、当距离探测器1与果树在对应高度上的距离在预设范围内时,则对应的喷头2喷药;s6、当距离探测器1与果树在对应高度上的距离在预设范围外时,距离调整装置调整探测装置及喷洒装置与果树的距离,使距离探测器1与果树在对应高度上的距离在预设范围内。
29.本发明中,将果树所在区域划分为喷药区域,其他区域划分为非喷药区域,只有喷药车到达喷药区域后,距离探测器1及喷头2才会开始工作。由于树冠形状并不规则,因此,本发明中,对应的距离探测器1和喷头2位于同一高度,而不同的喷头2位于不同的高度,这样,可以根据不同高度的喷头2与树冠的距离的不同,进行针对性的喷药,避免了药液的浪费。此外,喷药车在进行全自动喷药的过程中,具有自动校准功能,例如,设置预设范围为250mm至1000mm,当距离探测器1与果树在对应高度上的距离在预设范围外时,距离调整装置调整探测装置及喷洒装置与果树的距离,使距离探测器1与果树在对应高度上的距离在预设范围内,在完成调整前,可控制移动装置停止前进,喷头2停止喷药,完成调整后,喷头2和移动装置再继续工作,进而保证有效喷药,避免药液浪费。此外,若距离调整装置调整探测装置及喷洒装置与果树的距离采用整体调节,不能单独对某一高度的探测装置及喷洒装置进行调节,那么,则判断各高度的距离探测器1与果树的距离的平均距离是否处于预设范围内,并根据判断结果进行调节。
30.此外,由于树与树之间存在间隔,因此,若一侧的所有距离探测器1采集的距离都大于某一个值(例如,3000mm)则认为喷药车位于两树的间隔处,此时,不进行距离调整。
31.具体实施时,移动装置为履带式移动装置。
32.本发明中,针对果园的丘陵山区地形,优选采用履带式的移动装置,这样,可以在最大坡度为15
°
的地形下前进,保证喷药系统的正常运行。
33.具体实施时,距离探测器1与喷药车前端的距离小于喷头2与喷药车前端的距离。
34.以图3为例,喷药车单侧,可设置4个高度不同的喷头2,在靠近喷药车前端的一边为距离探测器1,此时距离探测器1与果树在对应高度上的距离在预设范围内时,移动装置前进预设距离后,对应的喷头2开始喷药,预设距离为距离探测器1与喷药车前端的距离和喷头2与喷药车前端的距离的距离差。
35.采用前后间隔设置距离探测器1与喷头2,可以使距离探测器1在喷头2正对目标之前确定距离,进而预先进行距离的调整。在喷药车前进预设距离的这段时间内,可将与果树在对应高度上的距离调整到预设范围内,无需喷药车停止前进或喷头2停止喷药,也能够实现药液的高效利用,提高了喷药效率。
36.具体实施时,所述果园智能喷药系统中,控制端包括显示装置;所述果园智能喷药方法包括:控制端向驱动装置发送半自动喷药命令及喷头2选择指令时,喷药车开启半自动
喷药模式并确定被选择的喷头2,与被选择的喷头2对应的距离探测器1采集与果树在对应高度上的距离,并通过显示装置显示;控制端向驱动装置发送确认指令,移动装置基于定位装置获取的位置信息按照预设轨迹前进,被选择的喷头2开始喷药;控制端向驱动装置发送手动喷药命令及喷头2选择指令时,喷药车开启手动喷药模式,并确定被选择的喷头2,与被选择的喷头2对应的距离探测器1采集与果树在对应高度上的距离,并通过显示装置显示;控制端向驱动装置发送确认指令,被选择的喷头2开始喷药,移动装置停止前进。
37.本发明中,喷药车除了进行全自动喷药之外,还可以进行半自动喷药。以图4中显示的控制端控制界面为例,a和b分别为启动及停止键。1、2、3分别对应全自动、半自动及手动模式。x1、x2、x3及x4分别为4个高度不同的喷头2的选择键。y和r分别为确认和返回键。
38.在进行喷药时,首先通过a键启动喷药车。若选择全自动模式,则按1发送全自动喷药命令,之后按y键,则喷药车进行全自动喷药。若选择半自动模式,则按2发送半自动喷药命令,此外,还可根据需要按x1至x4,发送喷头2选择命令(若不进行选择,则默认所有喷头2均进行喷药),之后按y键,则喷药车进行半自动喷药,喷药过程中,显示装置显示与果树在对应高度上的距离,工作人员可根据需要更改喷药的喷头2。若选择手动模式,则按3发送手动喷药命令,此外,还可根据需要按x1至x4,发送喷头2选择命令(若不进行选择,则默认所有喷头2均进行喷药),之后按y键,则喷药车进行手动喷药,喷药过程中,显示装置显示与果树在对应高度上的距离,工作人员可根据需要更改喷药的喷头2。
39.具体实施时,喷药车还包括朝向喷药车前端设置的与驱动装置电连接的全景图像采集装置,控制端包括用于显示全景图像采集装置采集的全景图像的显示装置。
40.全景图像采集可为安装在喷药车上方的摄像头,为了获取更多的图像,摄像头可通过竖直安装杆与喷药车连接,使摄像头安装在更高的位置。
41.此时,全景图像采集装置采集全景图像发送至驱动装置,驱动装置将全景图像发送至控制端并通过显示装置显示全景图像。工作人员可通过控制端远程掌控喷药情况,并进行远程控制。
42.具体实施时,果园智能喷药系统还包括与控制端电连接的树冠扫描雷达。
43.树冠扫描雷达可设置在喷药车上,按照预设轨迹自动完成对果园所有果树的树冠扫描。本发明中,在喷药前,可利用树冠扫描雷达对果园中的果树进行树冠扫描并建模计算树冠体积,喷药时,基于树冠体积确定每颗果树的喷药量,并基于确定的喷药量进行喷药,这样,在保证喷药效果的情况下,能够更加高效的利用药液。
44.利用雷达进行扫描并确定喷药量的具体方法包括:1)利用激光雷达采集数据并进行叶面积计算:a.采集不同规格大小的树叶,此处以大(a)、中(b)、小(c)三种规格树叶为例,确定树叶图像与树叶实物的比例系数k1、k2、k3;b.将图像转化为灰度图后,通过最大类间方差法求解灰度图阈值,利用该阈值进行图像二值化并腐蚀,获得树叶完整无孔洞的二值化图像。
45.c.利用凸包算法进行外形轮廓连线叶面积逼近,获得完整无孔洞的叶面积x1、x2、x3。
46.2)利用模糊pid算法对叶面积进行优化,进行同一树种多次实验(比如另一大规格
树叶a1与a对比,得到比值e1),对叶面积进行补偿量设计,得到补偿量w关于比值e的函数关系。通过该关系,建立果园所有果树的喷药量数据库。
47.3)实验中,通过每棵树前设立的正方形参考物,进行数据对比,利用正方形参考物在激光雷达扫描的面积与正方形参考物实际面积的比值q与雷达扫面的叶面积值,快速计算出树的实际叶面积值,并根据数据库里该树的编号进行增加或减少补偿量吗,从而达到实时精准变量喷药。
48.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管通过参照本发明的优选实施例已经对本发明进行了描述,但本领域的普通技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离所附权利要求书所限定的本发明的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1