一种水果采摘机的制作方法
1.本实用新型属于水果采摘技术领域,具体涉及一种用于对位于不同高处水果进行采摘的水果采摘机。
背景技术:
2.当前,在国内的水果采摘作业过程中,基本上都是以人工直接采摘的方式进行,其人力费用约占成本的50%~70%,并且费时费力。而采摘机器人作为农业机器人的重要类型,其作用在于能够降低工人劳动强度和生产费用、提高劳动生产率和产品质量、保证果实适时采收。
3.目前,在国内外均有很多关于水果采摘机械和设备的研究。例如,在国内的有关研究中就公开了与手扶拖拉机配套的机械振动式山楂采果机、设有5个自由度机械手的林木球果采摘机器人、基于彩色信息和红外热成像技术的树上水果识别方法、基于光谱图像技术结合sam算法识别自然场景下成熟柑橘技术,同时,在国外公开使用的有利用振摇果树方式收获水果的采摘机械、采用枢轴式摆动悬挂机构作为行走部分并且使用电视摄像机和无线电控制组合的自走式采摘车等。
4.借助上述采摘机械和设备可以替代人工进行水果的快速有效采摘,减少人力使用,提高采摘效率。但是,上述采摘机械和设备的占地空间一般较大,对于平原地区和坡度较小丘陵地区成片统一管理的大型现代化果园来说可以很方便的引入和使用,提高作业效率,而对于我国广大山地区域所采用的分散栽培,分户管理的水果种植情况来说,不仅很难将上述采摘机械和设备顺利引入采摘区域,而且在空间狭小区域内设备移动不便且极易造成对果树的损坏,并且上述采摘机械和设备的成本较高,对于广大的小果农来说很难真正买得起和用得起。
技术实现要素:
5.为了解决上述现有采摘机械和设备在使用过程中存在的占地空间大、成本高的问题,本实用新型提出了一种可以对位于不同高处水果进行采摘的水果采摘机。该水果采摘机,包括支架、转动单元、伸缩杆和采摘单元;所述支架的一端与地面支撑固定,另一端与所述转动单元连接;所述伸缩杆的一端与所述转动单元固定连接,另一端与所述采摘单元固定连接,其中,所述转动单元可以带动所述伸缩杆进行水平方向转动以及调整所示伸缩杆在竖直平面内的角度;
6.所述采摘单元由壳体、铁丝刀具、腰鼓形轴和电机组成;所述壳体与所述伸缩杆固定连接,并且设有进口和出口;所述腰鼓形轴位于所述壳体内部的进口和出口之间,并且与所述电机的输出端连接;所述铁丝刀具固定在所述腰鼓形轴上,并且所述铁丝刀具与所述腰鼓形轴之间留有水果通道。
7.优选的,该水果采摘机还设有输送管道和水果收集装置;所述输送管道的一端与所述壳体的出口连接,另一端与所述水果收集装置连接。
8.进一步优选的,所述输送管道采用柔性管道。
9.进一步优选的,所述伸缩杆上设有转接头,用于对所述壳体和所述水果收集装置之间的输送管道进行固定连接。
10.优选的,所述水果收集装置为箱体结构并且固定在所述支架下端。
11.进一步优选的,所述水果收集装置的下端设有车轮。
12.优选的,所述转动单元由转体、手轮和连接杆组成;其中,所述转体通过插杆与所述支架进行插装连接,所述手轮与所述转体固定连接,并且所述手轮的输出端与所述连接杆连接,用于调整所述连接杆在竖直平面内的角度。
13.进一步优选的,所述伸缩杆与所述连接杆之间采用可拆卸式固定连接。
14.优选的,所述伸缩杆采用套管结构,并且设有转盘和螺纹杆;所述转盘套设在所述伸缩杆中靠近所述转动单元的位置,并且可以相对于所述伸缩杆进行圆周方向转动;所述螺纹杆的一端与所述转盘螺纹连接形成螺旋机构,另一端固定在所述伸缩杆中靠近所述采摘单元的一端。
15.优选的所述支架采用高度可调的三角支架结构。
16.采用本实用新型的水果采摘机进行水果采摘时,具有以下有益技术效果:
17.1、本实用新型的水果采摘机由支架、转动单元、伸缩杆和采摘单元组成,不仅结构简单、体积小、制造方便、成本低,而且通过支架就可以将整个水果采摘机快速固定在待采摘水果附件,以及通过转动单元和伸缩杆就可以实现对采摘单元空间位置的快速调整,实现对周围水果的快速采摘,操作简单、使用灵活,满足不同环境中的使用,实现单人操作完成对水果的采摘收集,减少人力,提高采摘效率。
18.2、在本实用新型的水果采摘机中,通过采用由壳体、铁丝刀具、腰鼓形轴和电机组成的采摘单元进行水果采摘,不仅借助尺寸较小的铁丝刀具可以对固定水果的树枝进行快速精准切割,避免对水果造成撞伤,而且采用铁丝刀具和腰鼓形轴配合的方式可以大大增加壳体内部用于容纳水果的区域,保证切割后的水果可以快速通过壳体出口引出,提高对水果的保护和收集速度。
附图说明
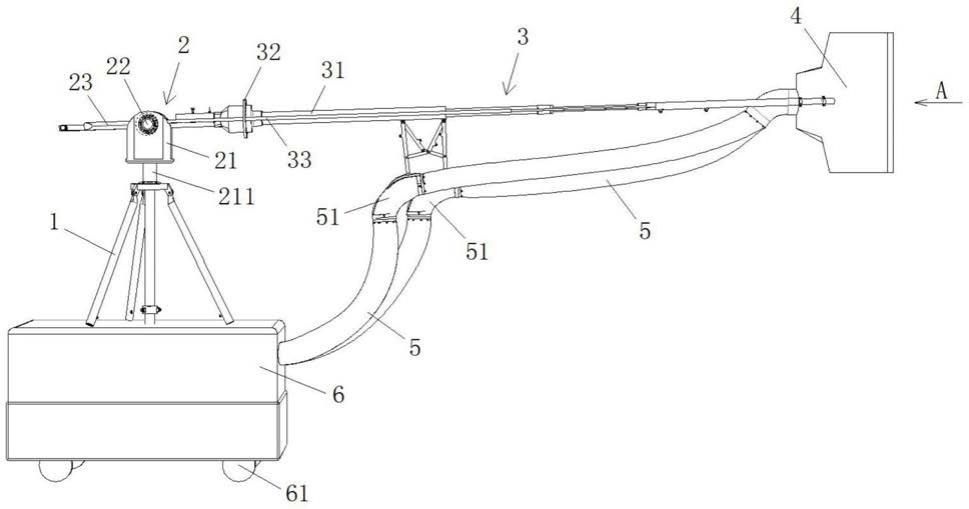
19.图1为本实施例水果采摘机的外形结构示意图;
20.图2为本实施例水果采摘机外形结构的俯视示意图;
21.图3为图1中沿a向的局部放大结构示意图。
具体实施方式
22.下面结合附图和实施例对本实用新型的技术方案作进一步详细介绍。
23.结合图1所示,本实施例水果采摘机,包括支架1、转动单元2、伸缩杆3 和采摘单元4。支架1选用高度可调的三角支架结构,下端与地面支撑固定,上端与转动单元2连接。伸缩杆3的一端与转动单元2固定连接,另一端与采摘单元4固定连接。其中,转动单元2可以带动伸缩杆3进行水平方向的转动以及调整伸缩杆3在竖直平面内的角度,从而对采摘单元4的空间位置进行调整改变。
24.结合图3所示,采摘单元4由壳体41、铁丝刀具42、腰鼓形轴43和电机组成。壳体41
与伸缩杆3的伸出端可拆卸式固定连接,并且设有进口和出口,用于水果的引入和引出。腰鼓形轴43位于壳体内部的进口和出口之间,并且与电机的输出端连接,从而在电机的驱动下进行转动。在本实施例中,设有三个铁丝刀具42,并且沿圆周方向均布固定在腰鼓形轴43上,随腰鼓形轴进行同步转动,其中在铁丝刀具42与腰鼓形轴43之间留有水果通道,以便于水果顺利通过铁丝刀具和腰鼓形轴区域到达壳体的出口位置。在本实施例中,选用大扭矩型的直流涡轮减速电机对腰鼓形轴进行转动驱动,同样,在其他实施例中,根据对腰鼓形轴的不同转动要求,也可以选用其他形式的电机。
25.此外,在本实施例中,壳体采用透明塑料板制备,例如透明pvc硬板。这样,不仅可以减轻整个采摘单元的重量,便于携带、拆装和控制,而且还可以直观的实时观察到水果在壳体内的位置,保证铁丝刀具可以对树枝进行准确切割,提高对水果的采摘精准度和保护。
26.结合图3所示,在本实施例中,铁丝刀具42由铁丝弯制而成,由刀头部分 421和两个支撑部分422组成。其中,两个支撑部分422分别用于与腰鼓形轴 43的两端进行插装固定连接,使刀头部分421与腰鼓形轴43的轴线保持平行,从而对进入刀头部分421和腰鼓形轴43之间的水果进行树枝的精准切割。根据待采摘水果的外形和尺寸,可以对两个支撑部分422之间的距离以及刀头部分 421与腰鼓形轴43之间的距离进行调整,保证壳体内有足够的容纳水果空间,使水果在被从树枝上切下后可以顺利穿过铁丝刀具和腰鼓形轴到达壳体的出口位置,避免铁丝刀具和腰鼓形轴对水果造成卡塞破坏。
27.此外,在本实施例中,铁丝刀具通过设置两个支撑部分与腰鼓形轴进行固定连接,以此提高对刀头部分的支撑稳定性。同样,在其他实施例中,根据待采摘水果的不同,也可以只设置一个支撑部分对刀头部分进行支撑,以此提高壳体内用于水果通过的区域空间,最大限度降低对水果的挤压损伤。
28.结合图1所示,在本实施例的水果采摘机中,还设有输送管道5和水果收集装置6。其中,输送管道5的一端与壳体1的出口连接,另一端与水果收集装置6连接,从而可以借助输送管道将采摘获得的水果快速引致水果收集装置中进行收集存储。
29.优选的,在本实施例中,输送管道采用柔性管道,例如铝箔排烟管。这样,不仅可以大大降低输送管道的重量,便于安装、携带和使用,而且还可以对水果起到缓冲保护作用,降低对水果的破坏,提高对水果收集输送过程的保护。
30.此外,结合图1所示,在伸缩杆3上还设有转接头51,用于对输送管道5 进行辅助固定和连接,控制壳体与水果收集装置之间的输送管道坡度,保证水果可以平稳穿过输送管道至水果收集装置中。
31.结合图1所示,在本实施例中,水果收集装置6采用箱体结构,并且直接固定在支架1的下端。这样,不仅可以使水果收集装置与整个水果采摘机形成一体,减少对水果收集装置的单独搬运操作,减少操作人员的作业量,还可以利用其作为配重保证整个采摘机的稳定性,提高采摘过程的安全可靠。同时,在水果收集装置6的下端还设有四个车轮61,例如万向轮。借助车轮可以提高整个采摘机的移动灵活性,便于转移搬运。
32.结合图1和图2所示,本实施例的转动单元2由转体21、手轮22和连接杆 23组成。其中,转体21的下端通过插杆211与支架1的顶部插装连接,手轮 22与转体21的上端固定连接。连接杆23与手轮22的输出端连接,可以在手轮 22的带动下进行竖直平面内的角度调整。
33.在本实施例中,连接杆的中间位置与手轮的输出端连接,使连接杆的一端作为手柄端,用于操作人员的手扶固定和操作,另一端则作为连接端与伸缩杆插装连接后,通过两个蝶形螺栓锁紧固定,从而实现转动单元与伸缩杆之间的可拆卸式固定连接。这样,不仅可以对水果采摘机的各个部件进行快速拆装,便于携带和搬运,而且还可以根据不同环境和使用情况快速更换不同尺寸和结构的伸缩杆和采摘单元,提高整个水果采摘机的使用效率。同样,在其他实施例中,也可以采用其他方式进行连接杆与伸缩杆之间的可拆卸式固定连接,例如采用法兰连接。
34.结合图1和图2所示,在本实施例中,伸缩杆3由主杆31、转盘32和螺纹杆33组成。其中,主杆31采用套管结构,由多节不同直径尺寸的圆管依次套设连接组成。转盘32借助轴承组件套设在主杆31中靠近转动单元2的位置,并且可以相对于主杆31进行圆周方向的往复转动。螺纹杆33与主杆31平行设置,并且一端与转盘32螺纹连接形成螺旋机构,另一端固定在主杆31中靠近采摘单元4的一端。此时,操作人员在操作连接杆的手柄端过程中,就可以通过对转盘的实时转动操作,利用转盘与螺纹杆之间形成的螺旋机构,驱动螺纹杆沿主杆的轴向进行往复移动,从而实现由螺纹杆带动伸缩杆进行的长度调节。
35.采用本实施例的水果采摘机进行水果采摘操作时,首先将水果收集装置和支架移动至待采摘区域,并将转动单元插装至支架上,接着选取合适的伸缩杆和采摘单元,并将伸缩杆与转动单元的连接杆进行固定连接,同时安装柔性管道完成壳体与水果收集装置之间的连接,然后控制连接杆的手柄端,转动转盘调整采摘单元的位置,使待采摘水果位于壳体中腰鼓形轴和铁丝刀具之间,最后启动电机带动腰鼓形轴和铁丝刀具进行转动,将水果连接的树枝切断,完成对水果的采摘,之后调整采摘单元的位置,即可对周围的水果依次进行采摘。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1