一种自动化植物种植用夹爪以及夹取装置的制作方法
[0001]
本实用新型属于农业种植技术领域,具体涉及一种蔬菜种植时,从栽种盘中夹取植物的自动化夹爪以及夹取装置。
背景技术:
[0002]
穴盘育苗技术因其具有发芽率高、苗株整齐、病虫害少、生长周期短、不受季节限制、便于机械化作业等诸多优点,目前已经在市场上普遍应用。育苗完成后,需要对种苗进行转移,而移动夹爪便是穴盘苗移栽设备的关键部件之一,其必须能实现稳定的取苗和持苗以及有效的钵苗释放,而且要对不同的作物品种及不同的穴盘规格有很强的适应性。
[0003]
专利cn 103477768a公开了一种斜入式穴盘苗移栽手爪,包括机架,滑动台,钢针固定板,套筒固定板,套筒,钢针,加固板,缓冲套筒,销轴,气缸,气缸固定在机架上部,滑动台中部固定在气缸的推杆端部,2个销轴分别固定在2个钢针固定板上部,并安装在滑动台两侧的长孔中,套筒固定板中部固定在机架底部,4个套筒分别固定在套筒固定板的四角,4根钢针下部分别安装在4个套筒中,顶部分别固定在两侧的钢针固定板下部,加固板四角有四个长孔,加固板位于套筒固定板下部,套筒穿过加固板4角的长孔,4个缓冲套筒套在4根钢针6安装在套筒固定板上部;该技术方案采用钢针以一定角度插取穴盘苗的形式,实用性强,且结构简单、稳定,自动化程度高。又如专利cn103597939a公开了一种单气缸驱动的插拔夹取式穴盘苗移栽手爪,驱动气缸安装在支架上板下面,气缸杆与螺纹推杆一端固接;苗针安装板与螺纹推杆固定,四个苗针紧固滑动件分别固定在苗针安装板四个侧面;中间压板与针管安装板用弹簧隔开形成滑动副,四个针管紧固转动件的一端分别装在各自中间压板的凹槽内与圆柱销形成滑动副,另一端分别装在针管安装板各自的凹槽内形成转动副,四根退苗针管分别穿过各自的针管紧固转动件后固接,四根取苗针的另一端穿过各自的退苗针管后形成滑动副,针管安装板安装在支架下板上面;该技术方案在气缸一个推程内完成插入和夹取两个动作,取苗针插入钵苗的深度和角度调节方便,对不同的作物品种和不同的穴盘规格适应性强。但上述两项技术方案中钢针或取苗针在下降取苗时的斜度大小固定不变,虽然能夹取到植物苗,但其夹取并不够牢固,在进行移动的过程中,极易掉落。
技术实现要素:
[0004]
为解决以上技术问题,本实用新型提出了一种从栽种盘中夹取植物以及植物移动的自动化夹爪以及夹取装置,通过顶针固定件、转轴、弹簧等部件的配合设置,使得夹爪在夹取植物时,准确率更高,夹取更牢固,同时,通过扩展板的设置,可一次性夹取多个植物,x型活动架可改变各个夹爪之间的距离,可适用于不同尺寸大小的栽种盆。
[0005]
本实用新型提出的技术方案如下:
[0006]
一种自动化植物种植用夹爪,由驱动装置、若干个顶针、顶针固定件、转轴固定件、主支架、若干个转轴和若干个弹簧组成,顶针、转轴件和弹簧的数量相等,驱动装置穿过主支架与顶针固定件连接,并驱动顶针固定件上下运动,顶针可活动地固定在顶针固定件上,
并与顶针固定件呈一定角度向内斜向设置,转轴固定件固定在主支架上,转轴可活动地固定在转轴固定件上,并与转轴固定件呈一定角度向内斜向设置,顶针穿过转轴并伸出转轴,转轴固定件与顶针固定件之间的顶针上分别套有一弹簧,顶针固定件在向下压迫弹簧时,弹簧挤压转轴,使得转轴偏离原始位置向下内转,带动顶针朝着夹爪中心轴的方向靠拢,完成目标物的夹取。
[0007]
优选地,转轴的底部还固定有顶针丝筒,顶针位于顶针丝筒内,气缸向下推动顶针固定件时,顶针穿出顶针丝筒,完成目标物的夹取。
[0008]
优选地,顶针固定件设有与顶针数量相同的末端,所述末端为“u”形固定槽的结构,“u”形固定槽的两侧横向各设置有一个小孔ⅰ,顶针的顶部横向设置有一个小孔ⅰ,顶针的顶部位于“u”形固定槽内,固定插销穿过三个小孔ⅰ,将顶针与顶针固定件的固定。
[0009]
优选地,转轴固定件设有与转轴数量相同的末端a,转轴由“u”形件和圆柱套筒组成,圆柱套筒与“u”形件呈垂直关系固定在“u”形件内,“u”形件的两侧横向各设置有一个小孔ⅱ,末端a上也横向设置有一个小孔ⅱ,末端a放置在“u”形件内,固定插销穿过三个小孔ⅱ,完成转轴与转轴固定件的固定。
[0010]
本实用新型还公开了一种自动化植物种植用夹取装置,由扩展板和若干个上述的自动化植物种植用夹爪组成,扩展板由可伸缩的x型活动架、支撑架、电机、螺杆固定架和若干个夹爪固定杆组成,支撑架同一侧的上下两个部分分别设有一个轨道,夹爪固定杆的顶部和底部设有滑轮,滑轮放置在轨道上,完成夹爪固定杆与支撑架的固定,夹爪固定杆与x型活动架固定连接,若干个夹爪固定杆之间相互平行,电机固定在支撑架的顶部,螺杆固定架与x型活动架固定连接,电机中的螺旋杆与螺杆固定架固定连接,自动化植物种植用夹爪分别与夹爪固定杆固定连接。
[0011]
与现有技术相比,本实用新型具有以下技术优势:
[0012]
(1)本实用新型中的顶针固定件与顶针、转轴与转轴固定件皆为可活动性连接,当驱动装置驱动顶针固定件向下运动过程中,压缩弹簧,弹簧迫使转轴相对于转轴固定件向下并向内靠拢,带动顶针与顶针固定件之间的角度不断发生改变,顶针之间相互靠近,由此夹取目的物更牢度,更准确,在转移过程中,也不会发生掉落,可适用于不同尺寸大小的栽种盆中的植物夹取;而传统的夹爪中的顶针与顶针固定件的角度是固定不变,夹取不够牢固,可适用的栽种盆的种类少,且整个装置的制造结构较为复杂,而本实用新型中的夹爪,结构简单,顶针、转轴等部件拆卸方便,便于后期维修等工作。
[0013]
(2)本实用新型中顶针在向下夹取植物时,需先插入泥土中,由此,顶针在插取的过程中,极有可能会携带一点泥土,不方便后面植物的夹取,故本实用新型在转轴下方安装了顶针丝筒,当夹爪夹取植物并移至固定位置后,驱动装置会驱动顶针固定件向上运动,顶针也跟着向上收缩,进行下一轮的夹取工作,当顶针收缩回顶针丝筒内时,可将顶针上携带的泥土剔除,便于顶针进行下一轮的顺利夹取;
[0014]
(3)本实用新型设置了扩展板,将多个夹爪固定在扩展板的x型活动架上,可以一次性夹取多个栽种盘中的植物;x型活动架的收缩与展开,可调整夹爪之间的距离,可适用于不同尺寸大小的栽种盆或者不同距离之间的栽种盆中的植物夹取。
附图说明
[0015]
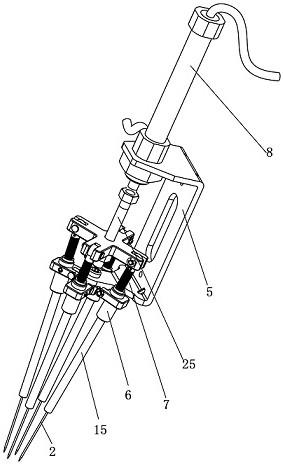
图1为本实用新型中夹爪的立体结构示意图
[0016]
图2为本实用新型中夹爪的爆炸式结构示意图
[0017]
图3为本实用新型中顶针固定件和顶针的位置关系结构示意图
[0018]
图4为本实用新型中顶针固定件和顶针的位置关系爆炸式结构示意图
[0019]
图5为本实用新型中转轴和转轴固定件的位置关系结构示意图
[0020]
图6为本实用新型中转轴和转轴固定件的位置关系爆炸式结构示意图
[0021]
图7为本实用新型中夹取装置的连接结构示意图
[0022]
图8为本实用新型中扩展板的结构示意图
[0023]
图9为本实用新型中顶针伸出顶针丝筒时的夹爪示意图
[0024]
图10为本实用新型中顶针未伸出顶针丝筒时的夹爪示意图
[0025]
其中:1、夹爪 2、顶针 3、顶针固定件 4、转轴固定件 5、主支架 6、转轴 7、弹簧 8、气缸 9、“u”形固定槽 10、小孔
ⅰꢀ
11、固定插销 12、小孔
ⅱꢀ
13、“u”形件 14、圆柱套筒 15、顶针丝筒 16、扩展板 17、x型活动架 18、支撑架 19、电机 20、螺杆固定架 21、夹爪固定杆 22、轨道 23、滑轮 24、螺旋杆 25、气缸推杆。
具体实施方式
[0026]
现结合具体实施例和附图对本实用新型做进一步说明。
[0027]
如图1和图2所示,本实用新型公开了一种自动化植物种植用夹爪1,由气缸8、四个顶针2、顶针固定件3、转轴固定件4、主支架5、四个转轴6和四个弹簧7组成,主支架5呈“]”形,气缸8穿过主支架5的顶部与顶针固定件2连接,并驱动顶针固定件2在主支架5的内侧做上下运动,顶针2可活动地固定在顶针固定件3上,如图3和图4所示,顶针固定件3为“十”形,其四个末端为“u”形固定槽9的结构,“u”形固定槽9的两侧横向各设置有一个小孔ⅰ10,顶针2的顶部设置有一个小孔ⅰ10,顶针2的顶部位于“u”形固定槽9内,固定插销11穿过三个小孔ⅰ10,使顶针2与顶针固定件3呈一定角度固定设置,即四个顶针2向夹爪中心轴的位置斜向设置;转轴固定件4固定在主支架5外侧的底部,转轴6可活动地固定在转轴固定件4上,如图5和图6所示,转轴固定件4为“十”形,其四个末端横向设置有一个小孔ⅱ12,转轴6由“u”形件13和圆柱套筒14组成,圆柱套筒14与“u”形件13呈垂直关系固定在“u”形件13内,“u”形件13的两侧横向各设置有一个小孔ⅱ12,转轴固定件4的四个末端分别放置在“u”形件13内,固定插销11穿过三个小孔ⅱ12,使转轴6与转轴固定件4呈一定角度固定设置,即四个转轴6向夹爪中心轴的位置斜向设置。顶针2穿过转轴6并伸出转轴6,转轴固定件4与顶针固定件3之间的顶针2上分别套有一弹簧7,顶针固定件3在向下压迫弹簧7时,弹簧7挤压转轴6,使得转轴6偏离原始位置向夹爪中心轴的位置内转,带动顶针2向内靠拢,完成目标物的夹取。
[0028]
作为本实用新型的优选方案,本实用新型在转轴6的底部固定有顶针丝筒15,顶针2位于顶针丝筒15内,气缸8向下推动顶针固定件3时,顶针2穿出顶针丝筒15,完成目标物的夹取。
[0029]
如图7和图8所示,本实用新型还公开了一种自动化植物种植用夹取装置,由扩展板16和四个自动化植物种植用夹爪1组成,扩展板16由可伸缩的x型活动架17、支撑架18、电机19、螺杆固定架20和四个夹爪固定杆21组成,位于支撑架18同一侧的顶部和底部的位置
上分别设有一个轨道22,夹爪固定杆21的顶部和底部设有两个滑轮23,滑轮23放置在轨道22上,完成夹爪固定杆21与支撑架18的固定,夹爪固定杆21与x型活动架17固定连接,四个夹爪固定杆21之间相互平行,电机19固定在支撑架18的顶部,螺杆固定架20与x型活动架17固定连接,电机19中的螺旋杆24与螺杆固定架20固定连接,主支架5固定在夹爪固定杆21上,完成自动化植物种植用夹爪1与扩展板16固定连接。
[0030]
本实用新型中的夹爪1在实际使用时,机械臂驱动夹取装置来到栽种盘的上方,电机19驱动螺旋杆24向上或向下运动,带动螺杆固定架20的上升或下降,螺杆固定架20上升时,拉动x型活动架17收缩,夹爪1之间的位置变小,螺杆固定架20下降时,推动x型活动架17展开,夹爪1之间的位置变大,按照用户要求设置好夹爪1之间的位置后,如图10所示,顶针2与顶针固定件3的原始角度为91.9度,气缸8开始驱动气缸推杆25推动顶针固定件3向下运动压缩弹簧7(图中未标出),弹簧7迫使迫使转轴固定件4向下并朝着夹爪固定轴的方向靠拢,顶针固定件3向下运动时,顶针2也慢慢伸出顶针丝筒15(如图9所示),顶针2可插入栽种盘的土壤中,进行目的植物的夹取,此时,顶针2与顶针固定件3的角度已经变成了95.7度,完成夹取后,机械臂驱动夹取装置来到目的植物放置的位置,气缸8驱动气缸推杆25拉动顶针固定件3向上运动,弹簧7回归原始状态,顶针2回归顶针丝筒15内,目的植物与顶针2脱落,若此时顶针2上沾有土壤,也会被顶针丝筒15阻挡在外,由此完成目的植物的夹取与转移。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1