一种基于二轴平台的宠物互动系统的制作方法
[0001]
本发明涉及压气机械技术领域、电控技术领域,尤其涉及一种基于二轴云台的宠物互动系统。
背景技术:
[0002]
随着社会的发展,越来越多的城市居民开始饲养宠物,人们的工作生活节奏也越来越快,宠物主人越来越没有时间和精力对宠物进行过多的玩耍和陪伴,为了能让宠物在主人不在身边时,也能愉快、多方式、安全的玩耍,我们需要借助宠物互动系统装置。但是目前,国内外市场上宠物互动系统主要分为抛球器和投喂器,普遍存在功能单一,价格昂贵等问题。捡球是宠物比较喜欢的运动方式,为了增加捡球的乐趣,人们会使用到宠物抛球器,然而现有技术的宠物抛球器使用效果差,抛球距离无法手动调节,使用并不灵活,不能识别宠物离发射口的距离,风险大,不够安全。而投喂式互动系统发射方式单一,无法根据食物弹丸的重量改变出力,实用性不强。
技术实现要素:
[0003]
为了解决以上的不足,本发明提供一种基于二轴平台的宠物互动系统,能够实现用户远程与宠物互动的需求,设计远程互动系统,并且解决了单一的互动交流问题,用户可以使用手机、平板电脑等移动终端,通过网络控制平台与宠物进行互动,实现空间上的旋转俯仰,提供更多的发射方案,并且可以同时实时观看宠物活动情况,具有智能、风险小、安全、低成本并且实用性强等优点。
[0004]
为达到上述目的,本发明技术方案如下:一种基于二轴平台的宠物互动系统,包括有云台机构、炮台机构、供弹机构,其特征在于:所述的云台机构包括有两台6025步进电机,一台作为承重电机(1),承重电机(1)上三个定位孔与5mm碳纤悬吊片(3)相连,承重电机(1)处于悬吊状态,电机轴上安装法兰(4),法兰(4)与底座(5)相连,另一台为俯仰电机(2),位于底座(5)上,底座(5)两侧分别有一支撑架,一侧的支撑架为u形状支撑电机轴(25),另一侧的支撑架为线性滚轴(26),u形状支撑电机轴(25)上连接法兰(6),法兰(6)与上云台(7)固定,线性滚轴(26)和钢柱(24)连接起来,钢柱(24)固定在云台(7)上;所述的炮台机构包括有气缸(13)、pvc管(16)、pvc管(17)、电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关(12)、3mm玻纤板(27)、气压传感器(11)、陀螺仪传感器(28)、pla外壳(8)、pla外壳(9);所述的炮台机构分为电控舱和发射舱,这俩个舱被承重玻纤(27)隔开;气泵(29)位于pla外壳(8)的上部,通过t型pvc管(15)接通连接气缸(13)以及电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关(12);所述的的供弹机构包括有电机钢柱(19)、拨弹盘(21)、整流盖(20)、弹药舱(18),出弹口(22)与炮台进弹口(15)用软管(17)相连,由供弹电机(19)控制拨弹盘(21)的旋转,弹丸进入弹药舱(18)后自动整流,控制出弹丸的数量、速率、流入炮台的进弹口(15)。
[0005]
所述的基于二轴平台的宠物互动系统,其特征在于,所述的承重电机(1)与俯仰电
机(2)之间通过法兰(4)、5mm碳纤悬吊片(3)、底座(5)相连。
[0006]
所述的基于二轴平台的宠物互动系统,其特征在于,所述的电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关(12)、气缸(13)、陀螺仪传感器(28)和电磁阀(10)都位于所述的承重玻纤(27)上。
[0007]
所述的基于二轴平台的宠物互动系统,其特征在于,所述的出弹口(22)与炮台进弹口(15)用软管(17)相连。
[0008]
与现有技术相比,本发明的有益效果是:
[0009]
1、本发明设置云台机构:
[0010]
炮台体积小,高度集成的各种传感器为炮台性能的发挥提供保障。气压传感器以及陀螺仪的运用,使得炮台无论处于什么样的姿态,都可以具有安全的,精准的,可靠的实际表现。同时高度集成的炮台,与云台配合时将会联动炮台中的陀螺仪,更高的兼容性,更低的成本,更好的用户体验。t型通连接气泵,直通式电磁阀门和气缸,实现了一阀多用,同时兼备安全阀门的作用,结构简单,可靠性强,响应速度快,节省成本。
[0011]
2、本发明设置炮台机构:
[0012]
此系统基于二轴云台,可以实现空间上的旋转俯仰,提供了更多的发射方案。该系统可发射空气柱以及特制肉丸或鱼丸,这样宠物可以追着食物跑,同时也可以直接吃掉。既实现了传统产品涵盖的所有功能,又能实现无门槛上手。在炮台处加入了陀螺仪传感器和控制器以及通信模块,使得用户可以远程控制此产品,实现人与宠物的远程互动。
[0013]
两轴固定,主要由线性轴承以及轴承法兰构成,电机带动法兰转动控制云台面的俯仰,另一侧线性轴承与钢轴连接,与轴承法兰共同支撑上云台面。电机与底座相切,自身并不需要承受自重,有效的提升了实际载重能力,理论上相较传统悬吊结构承载能力提升50%。并且通过两轴固定的方式,使得电机转动所造成的震动几乎可以忽略不计,极大的提升了上云台面的稳定性,可靠性。
[0014]
3、本发明整机机构:
[0015]
炮台与云台为模块化设计,用户可以根据自己的喜好单独选装或者整套购买。并且单个产品具有优良的性能,保姆级前期设置,用途广泛,移植性高。
[0016]
结构方面,采用了竖直分布极大的节省了水平空间。承重电机采用悬吊式固定可以嵌入载体,固定片为5mm碳纤,具有一定的减震效果。承重电机所受的力与轴同心,提升了电机的使用寿命。底座以及云台面均可使用3d打印,其他固定片可采用雕刻机雕刻,便于加工。同时这样的布局可以实现全方位俯仰,提升了机动性。
附图说明
[0017]
为了更清楚地说明本发明实施例的技术方案,以下将对实施例描述中所需要使用的附图作简单地介绍。
[0018]
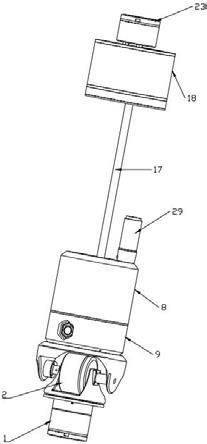
图1为本发明的结构示意图;
[0019]
图2为本发明云台机构示意图;
[0020]
图3为本发明炮台机构示意图;
[0021]
图4为本发明供弹机构示意图。
[0022]
图中,各个标号分别表示:承重电机1、俯仰电机2、5mm碳纤悬吊片3、法兰4、底座5、
法兰6、云台7、钢柱24、电机轴25、线性滚轴26、电控舱8、发射舱9、电磁阀10、气压传感器11、陀螺仪传感器12、单片机28、气缸13、炮管14、炮台进弹口15、炮台供气管16、3mm玻纤板27、软管17、弹药舱18、电机钢柱19、整流盖20、拨弹盘21、出弹口22、供弹电机23。
具体实施方式
[0023]
为使本申请实施方式的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的图1-4,对本申请实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。基于本申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。因此,以下对在附图中提供的本申请的实施方式的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施方式。
[0024]
请参照图2,云台机构采用两台6025步进电机,一台作为承重电机1,负责水平旋转,电机1上三个定位孔与5mm碳纤悬吊片3连接,电机处于悬吊状态,电机轴上安装法兰4与底座5相连,另一台电机2作为俯仰电机,控制俯仰角,坐于底座5上,底座5包含两支撑架,一侧为u形状支撑电机轴25,另一侧为圆孔状连接线性滚轴26,电机轴25上连接法兰6与上云台7固定,另一侧线性滚轴26与钢柱25连接,钢柱25支撑上云台7;两台6025 bldc分别通过两片6025电机24v电调控制,电调连接24v电源进行供电,同时电调的信号线连接单片机,由单片机发出pwm信号进行控制。规定两种电机操控模式:1.云台模式2.舵机模式。承重电机1采用云台模式,俯仰电机2采用舵机模式。云台模式下,高电平脉宽为1ms表示停转,高电平脉宽为2ms表示满油门运转,中间每隔0.1ms设置一档。舵机模式,规定高电平高电平脉宽1.5ms为居中2ms为右满舵,1ms为左满舵,中间每隔0.1ms设置一档,满舵角度为
±
72
°
。俯仰电机2通过内置陀螺仪进行水平矫正以及限位。用户通过手机app上的模拟摇杆控制上下左右发出信号,由单片机28通信模块接收并分出上下,左右两种信号组,转化为两种模式的pwm信号,进而控制对应电调。再由陀螺仪传感器12识别此时云台的姿态,发送给单片机28,单片机28再将此信号由通信模块发送给用户手机,实时反馈此时的姿态。至此便实现了该云台的远程操控。
[0025]
请参照图3,所述的炮台机构包括有气缸13、pvc管16、pvc管17、电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10、3mm玻纤板27、气压传感器11、陀螺仪传感器12、pla外壳8、pla外壳9,气泵29;炮台分为电控舱和发射舱被承重玻纤27隔开,气泵29是位于pla外壳8的上部,通过t型pvc管15接通连接气缸13以及电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10。电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10,气压传感器11,陀螺仪传感器12连接单片机28,单片机28连接24v供电口。
[0026]
气缸13充气时,电磁阀10关闭,气泵29将只为气缸13充气。当需要发射时,气泵29关闭,电磁阀10开启,气体通过电磁阀10进入炮管14,小球被压缩气体挤出。当气缸13的压力低于安全值,电磁阀10将关闭,自动为气缸13补气。当气缸13压力高于安全值时,电磁阀10将开启,自动为气缸13泄压,同时气泵29断气。
[0027]
高电平视为开,低电平视为关,通过高低电平的变化实现阀门的开关。当单片机28通信模块接受到用户手机app“开炮”指令时,按键锁定,并将信号传递给主板arm芯片stm32f103zet6。由于l9352b为5v供电,不能直接stm32f103相接,因此中间使用四通道数字
隔离器adum1402进行电平转换以及输入输出隔离,以避免驱动电路对主控芯片产生影响。l9352b接到主控arm芯片发出的指令后,直接向气压传感器11供电,当气压不大于阈值时,启动外部时钟开始计时,0.1s后,激活通道1拉高电平,像稳压模块发出信号。当收到信号时,稳压模块将以24v恒定电压,向电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10供电,此时阀门打开进行放气,射出弹丸。当计时器达到0.2s时,此时关闭通道1,激活通道2,稳压模块儿停止供电,此时电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10处于关闭状态。当计时达到0.5s时,l9352b向供弹电机23供电,此时供弹电机23工作,主板arm芯片stm32f103zet6向供弹电机23发出信号,并由单片机28控制供弹电机旋转15
°
。当完成时,供弹电机23停止旋转,并向主板arm芯片stm32f103zet6发出信号,计时停止,主控芯片再向单片机28发出信号,由单片机通信模块发送指令到用户手机app,按键解锁。至此可进行下一次发射。
[0028]
当用户选择连发模式时,供弹电机23供电持续开启,计时器时间将会相应延长,当气压传感器11监测到气压小于阈值,发出信号至主控arm芯片stm32f103zet6,此时立即停止对供弹电机23供电,电磁阀2v025-08二位二通控制阀换向阀dc24v气阀开关10供电,并向单片机28发送信号,由单片机通信模块发送“冷却”信息用户手机app。
[0029]
当用户选择喷气模式时,主控arm芯片stm32f103zet6关闭通道1,2。电磁阀10的阀门常开,直至气缸13气压安全值最低值,电磁阀10关闭。
[0030]
(补充说明:上述所有过程均建立在气缸13气压处于安全值范围内,当气缸13内气压高于或低于安全的最大值和最小值时,气压传感器11将直接向主板arm芯片stm32f103zet6发出信号,根据实际情况自动控制电磁阀10的开关。)
[0031]
请参照图4,供弹机构由电机钢柱19,拨弹盘21,整流盖20,供弹电机23和弹药舱18组成,出弹口22与炮台进弹口15用软管17相连。由供弹电机23控制拨弹盘21的旋转,弹丸进入弹药仓18将自动整流,控制出弹丸的数量,速率、流入炮台的进弹口15。
[0032]
本发明未尽事宜为公知技术。
[0033]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1