一种全自动树木解伐一体机的制作方法
[0001]
本实用新型涉及一种解伐树木的智能机器,具体来说是设计一种智能化机器来代替伐木工人的伐木工作,实现待砍伐树木的快速安全解伐,提高工作效率。
背景技术:
[0002]
传统砍伐树木的装置可归类为以下几种:传统手锯、现代汽油机锯、现代电锯(含可延伸型电锯),以及大型的伐木机车,其中,传统手锯没有动力装置,耗时耗力;现代汽油机锯和电锯虽然有动力装置,但仍需人手持操控,还要有一定的切割技巧来控制树倒下的方向以保证工人自身的安全性;而大型伐木机车虽然自动化水平高、效率高,但是具有高昂的成本并且对工作的地形有要求,局限性大,由此可见,目前市面上的砍树装置并不能满足这些需求。
[0003]
近年来,林业设备大多是露天作业,受到自然条件的影响,具有一定的区域性,在伐木过程中通常需要工人先进行伐木,之后去除枝桠,最后堆积运输,伐木过程繁琐,耗费的人力物力大,浪费时间而且有一定危险性,此外,现有的伐木设备活动区域有限,在树木较密集的区域,大型伐木设备很难工作,在这种情况下,若伐木工序可由一台机器完成,则能够节约大量劳动力,并大大提高工作效率,因此,为了克服现有技术的不足,研究设计出一款具有除枝和锯切功能的综合性高效伐木一体机,不仅能够代替人工实现伐木、除枝以及切段的功能,还能降低伐木工人工作的危险程度,提高工作效率。
技术实现要素:
[0004]
为解决以上问题,针对实际情况,本实用新型提供了一种全自动树木解伐一体机,该实用新型主要针对树干较笔直的树木,本实用新型所要解决的技术问题是:如何使待砍伐的树木得到自动化、高效率的砍伐。
[0005]
所述全自动树木解伐一体机包括:骨架、螺旋爬升机构、左侧支撑架、右侧支撑架、切割机构、茬口打磨机构、收紧机构、红外线测距离传感器和限位开关,所述螺旋爬升机构与骨架固定连接,所述切割机构通过左侧支撑架与骨架固定连接,所述茬口打磨机构通过右侧支撑架与骨架固定连接,所述收紧机构安装在在骨架上,所述红外线测距离传感器和限位开关固定安装在骨架上,该全自动树木解伐一体机由自身所携带的蓄电池为各机构的运作提供电能。
[0006]
所述骨架包括左半骨架、右半骨架和合页;合页有五个,左半骨架通过合页与右半骨架相连接,合页的左页和右页分别固定在左半骨架与右半骨架上,左半骨架与右半骨架均为上下两层的半椭圆型结构,左半骨架单独承载了左侧支撑架、切割机构和限位开关的安装,右半骨架单独承载了右侧支撑架、茬口打磨机构和红外线测距离传感器的安装,左半骨架与右半骨架共同承载了螺旋爬升机构和收紧机构的安装。
[0007]
所述螺旋爬升机构包括动力摩擦轮、辅助摩擦轮、电动机、轮毂支架和支架连杆;动力摩擦轮有两个,辅助摩擦轮有四个,电动机有两个,轮毂支架有六个,支架连杆有六个;
[0008]
进一步的,所述动力摩擦轮和辅助摩擦轮分别安装在轮毂支架内,轮毂支架通过支架连杆固定安装在骨架的圆形凸台上,电动机固定安装在安装有动力摩擦轮的轮毂支架的一侧,用来驱动动力摩擦轮的旋转;
[0009]
优选的,所述动力摩擦轮的尺寸略大于辅助摩擦轮,动力摩擦轮和辅助摩擦轮均通过轮毂支架和支架连杆斜向安装在骨架上,倾斜方向一致且角度相同,支架连杆和骨架上的圆形凸台均开有便于调节摩擦轮倾斜角度的弧形槽;所述左半骨架和右半骨架的内侧为其半椭圆型结构的圆心一侧,左侧支撑架固定安装在左半骨架的内侧,右侧支撑架固定安装在右半骨架的内侧。
[0010]
所述切割机构包括底座、伺服电动机-、伺服电动机-、推力滚子轴承、旋转座、电锯、左端盖、右端盖、深沟球轴承、连接头和联轴器-;深沟球轴承有两个,连接头有两个;
[0011]
所述底座为一个圆环形结构,其上方设置有环形凹槽,用于放置推力滚子轴承的下半部分,同时旋转座的下方设置有大小形状相同的环形凹槽,用于放置推力滚子轴承的上半部分;底座固定安装在左侧支撑架的上方,伺服电动机-固定安装在底座的下方,推力滚子轴承的下半部分置于底座的环形凹槽中,旋转座通过联轴器-与伺服电动机-的动力输出轴固定连接,旋转座的环形凹槽与推力滚子轴承的上半部分紧密接触,伺服电动机-与旋转座组成了转动副-;在旋转座上从左到右依次安装有伺服电动机-、左端盖、联轴器-、深沟球轴承、连接头、电锯、连接头、深沟球轴承和右端盖,伺服电动机-固定安装在旋转座的左侧,左端盖安装在旋转座与伺服电动机-之间,连接头通过联轴器-与伺服电动机-的动力输出轴固定连接,在左端盖与连接头之间安装有深沟球轴承,连接头固定安装在电锯的左侧,电锯右侧的对称处安装有另一个连接头和深沟球轴承,在旋转座的右侧安装有用来固定深沟球轴承的右端盖,伺服电动机-与电锯组成了转动副-;
[0012]
优选的,所述转动副-的转动角度范围为0
°
——360
°
,转动副-的转动角度范围为0
°
——94
°
,转动副-实现了链锯在倾斜状态与水平状态之间的转换,转动副-则实现了水平状态下的链锯对树干的横向切断。
[0013]
所述茬口打磨机构包括底盘、滑块、丝杠、光杠、步进电机、步进电机座、支架、电机、联轴器-、打磨棒和支架盖;光杠和联轴器-各有两个;
[0014]
所述底盘固定安装在右侧支撑架上,底盘上开有三个通孔,用于安装丝杠和光杠,步进电机通过步进电机座固定安装在底盘的一侧,丝杠通过联轴器-与步进电机的动力输出轴固定连接,滑块上开有与底盘相对应的通孔,其中,其中间的通孔攻有与丝杠相配合的螺纹,滑块在丝杠和光杠的约束下安装在底盘的上方,支架固定安装在滑块的上方,支架呈倾斜的y字形,其倾斜角度为94
°
,电机固定安装在支架上,电机通过联轴器-与打磨棒连接,支架盖固定安装在y字形支架的上方,所述丝杠滑块可以调节打磨棒相对于该装置中心的位置,从而控制茬口的高度。
[0015]
所述收紧机构包括双输出轴电动机、联轴器-、转轴、挡圈、尼龙带、卡扣、拉力传感器、t型连接块和l型角铁;联轴器-、转轴、挡圈、尼龙带、卡扣和t型连接块各有两个,l型角铁有四个;
[0016]
所述双输出轴电动机固定安装在左半骨架上,该电机的两侧输出轴均通过联轴器-与转轴相连接,两个挡圈分别安装于两个转轴的远离电机一端,用来限制转轴的轴向移动,两条尼龙带的一端分别缠缚在两个转轴上,尼龙带的另一端与卡扣形成易拆卸的卡扣
式连接,上方的卡扣通过拉力传感器与t型连接块相连接,而下方的卡扣直接与t型连接块相连接,t型连接块通过轴端的两个l型角铁铰接在右半骨架上。
[0017]
所述红外线测距离传感器通过传感器支架固定安装在右半骨架上;所述限位开关通过限位开关卡槽固定安装在左半骨架上。
[0018]
综上所述,本实用新型的有益效果是:研究设计出一款同时具有去除侧枝和树干切断功能的综合性高效伐木一体机,不仅能够代替人工完成树木伐倒、去除侧枝以及切段等伐木过程,降低了伐木工人工作时的危险程度,而且还能提高伐木的效率。
附图说明
[0019]
为了更清楚的说明本实用新型实施例的技术方案,下面对实施例中需要使用的附图作简单介绍,应当理解,以下附图仅示出了本实用新型的某些实施方式,不应被看作是对本实用新型范围的限制,对于本领域技术人员而言,在不付出创造性劳动的情况下,能够根据这些附图获得其他附图;
[0020]
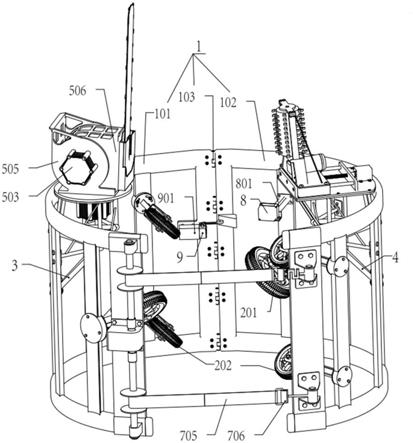
图1是本实用新型全自动树木解伐一体机的结构示意图;
[0021]
图2是本实用新型全自动树木解伐一体机的俯视结构示意图;
[0022]
图3是本实用新型全自动树木解伐一体机左半骨架及其上面安装零件的结构示意图;
[0023]
图4是本实用新型全自动树木解伐一体机右半骨架及其上面安装零件的结构示意图;
[0024]
图5是本实用新型全自动树木解伐一体机切割机构的结构示意图;
[0025]
图6是本实用新型全自动树木解伐一体机茬口打磨机构的结构示意图。
[0026]
图中标注:1—骨架、101—左半骨架、102—右半骨架、103—合页、201—动力摩擦轮、202—辅助摩擦轮、203—电动机、204—轮毂支架、205—支架连杆、3—左侧支撑架、4—右侧支撑架、501—底座、502—伺服电动机-、503—伺服电动机-、504—推力滚子轴承、505—旋转座、506—电锯、507—左端盖、508—右端盖、509—深沟球轴承、510—连接头、511—联轴器-、601—底盘、602—滑块、603—丝杠、604—光杠、605—步进电机、606—步进电机座、607—支架、608—电机、609—联轴器-、610—打磨棒、611—支架盖、701—双输出轴电动机、702—联轴器-、703—转轴、704—挡圈、705—尼龙带、706—卡扣、707—拉力传感器、708—t型连接块、709—l型角铁、8—红外线测距离传感器、801—传感器支架、9—限位开关、901—限位开关卡槽。
具体实施方式
[0027]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。
[0028]
实施例1
[0029]
如图1~6所示,本实用新型实施例中,一种全自动树木解伐一体机,包括骨架1、螺旋爬升机构、左侧支撑架3、右侧支撑架4、切割机构、茬口打磨机构、收紧机构、红外线测距离传感器8和限位开关9,所述螺旋爬升机构通过螺栓和螺母与骨架1固定连接,所述切割机
构通过左侧支撑架3与骨架1固定连接,所述茬口打磨机构通过右侧支撑架4与骨架1固定连接,所述收紧机构活动连接在骨架1上,所述红外线测距离传感器8和限位开关9固定连接在骨架1上。
[0030]
所述骨架1包括左半骨架101、右半骨架102和合页103,左半骨架101通过合页103与右半骨架102相连接。
[0031]
所述螺旋爬升机构包括动力摩擦轮201、辅助摩擦轮202、电动机203、轮毂支架204和支架连杆205,动力摩擦轮201和辅助摩擦轮202分别安装在轮毂支架204中,轮毂支架204通过支架连杆205固定安装在骨架1的圆形凸台上,电动机203固定安装在轮毂支架204的一侧来驱动动力摩擦轮201转动。
[0032]
所述左侧支撑架3固定安装在左半骨架101的内侧,右侧支撑架4固定安装在右半骨架102的内侧。
[0033]
所述切割机构包括底座501、伺服电动机-502、伺服电动机-503、推力滚子轴承504、旋转座505、电锯506、左端盖507、右端盖508、深沟球轴承509、连接头510和联轴器-511;底座501固定安装在左侧支撑架3的上方,伺服电动机-502固定安装在底座501的下方,旋转座505通过联轴器-511与伺服电动机-502的动力输出轴固定连接,伺服电动机-502与旋转座505组成了转动副-;在旋转座505上从左到右依次安装有伺服电动机-503、左端盖507、联轴器-511、深沟球轴承509、连接头510、电锯506、连接头510、深沟球轴承509和右端盖508,伺服电动机-503固定安装在旋转座505的左侧,左端盖507安装在旋转座505与伺服电动机-503之间,连接头510通过联轴器-511与伺服电动机-503的动力输出轴固定连接,在左端盖507与连接头510之间安装有深沟球轴承509,连接头510固定安装在电锯506的左侧,电锯506的右侧对称处安装有另一个连接头510和深沟球轴承509,在旋转座505的右侧安装有用来固定深沟球轴承509的右端盖508,伺服电动机-503与电锯506组成了转动副-。
[0034]
所述茬口打磨机构包括底盘601、滑块602、丝杠603、光杠604、步进电机605、步进电机座606、支架607、电机608、联轴器-609、打磨棒610和支架盖611,底盘601固定安装在右侧支撑架4上,滑块602在丝杠603和光杠604的约束下安装在底盘601的上方,支架607固定安装在滑块602的上方,支架607呈倾斜的y字形,其倾斜角度为94
°
,电机608固定安装在支架607上,电机608通过联轴器-609与打磨棒610连接,支架盖611上开有与打磨棒610转轴直径相同的通孔,其作用是使打磨棒610转动的更加平稳,支架盖611固定安装在y字形支架607的上方,所述滑块602可以调节打磨棒610的位置,来控制茬口的高度。
[0035]
所述收紧机构包括双输出轴电动机701、联轴器-702、转轴703、挡圈704、尼龙带705、卡扣706、拉力传感器707、t型连接块708和l型角铁709,双输出轴电动机701固定安装在左半骨架101上,该电机的两侧输出轴均通过联轴器-702与转轴703相连接,两个挡圈704分别安装于两个转轴703的远离电机一端,用来限制转轴703的轴向移动,两条尼龙带705的一端分别缠缚在两个转轴703上,尼龙带705的另一端与卡扣706形成易拆卸的卡扣式连接,上方的卡扣706通过拉力传感器707与t型连接块708相连接,而下方的卡扣706直接与t型连接块708相连接,t型连接块708通过轴端的两个l型角铁709铰接在右半骨架102上。
[0036]
所述红外线测距离传感器8通过传感器支架801固定安装在右半骨架102上。
[0037]
所述限位开关9通过限位开关卡槽901固定安装在左半骨架101上。
[0038]
实施例2
[0039]
如图1~6所示,一种基于实施例1所述全自动树木解伐一体机的解伐方法,步骤如下:
[0040]
s1、打开收紧机构中的卡扣,使机器环抱树干;
[0041]
s2、关闭卡扣,打开电源,收紧机构中的电机工作,带动尼龙带收紧,使机器抱紧待砍伐的树木,对于机器上下运行时树干直径大小的变化问题,收紧机构中的拉力传感器会实时监测,使尼龙带时刻保持收紧的状态,保证机器在爬升过程中摩擦轮受到一定的压力,从而产生足够的摩擦力来克服机器自身的重力,使机器不至于打滑;
[0042]
s3、螺旋爬升机构中的电机带动斜向安装的摩擦轮旋转,机器环抱树干螺旋爬升;
[0043]
s4、在上升过程中,红外线测距离传感器可以监测该机器与上方侧枝之间的距离,当机器与上方侧枝尚有一段距离时,倾斜状态的电锯工作,在螺旋爬升的过程中将侧枝清理掉;
[0044]
s5、侧枝修剪掉以后会存在一定高度的茬口,机器继续螺旋爬升,此时安装在右半骨架上的茬口打磨机构会在机器螺旋上升的过程中对茬口进行打磨,保证了机器上行时的流畅平稳;
[0045]
s6、上升至指定高度以后,切割机构中的伺服电动机-带动电锯转动,使电锯由倾斜状态变为水平状态;
[0046]
s7、伺服电动机-带动水平状态的电锯旋转一周实现树干的横向切断;
[0047]
s8、机器螺旋下降一段距离,通过红外线测距离传感与无线电遥控相结合的方式,实现机器下行时在树干上的精确定位,重复s7;
[0048]
s9、重复s8,直到机器到达地面,关闭电源,打开卡扣,将机器取下。
[0049]
本实用新型的有益效果是:本实用新型的自动化程度高,效率高,相比于传统的砍树方式,本实用新型同时具有去除侧枝和树干切断的功能,不仅能够代替人工完成树木伐倒、去除侧枝以及切段等伐木过程,降低了伐木工人工作时的危险程度,而且还能提高伐木的效率,大大解放了人力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1