一种机械自动化控制装置的制作方法
1.本实用新型涉及自动化捕鱼设备领域,具体是一种机械自动化控制装置。
背景技术:
2.自动化控制是指机器设备、系统或过程在没有人或较少人的参与下,按照要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。自动化技术在现代社会得到广泛的运用。自动化技术可以把人从繁重的体力劳动中解放出来,极大地提高劳动生产率。
3.传统的捕鱼多为人工操作,需要耗费较多的人力和时间,同时不能实时的收网,导致捕鱼效率较为低下。因此,本领域技术人员提供了一种机械自动化控制装置,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种机械自动化控制装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种机械自动化控制装置,包括机箱,所述机箱一侧开设有一组滑槽,所述机箱一侧通过滑槽连接有一组齿条,所述机箱一侧的上端连接有连接板,所述机箱顶部连接有控制器,所述机箱底部连接有浮板,所述机箱内部的两侧连接有一组轴承座,所述机箱内部通过轴承座连接有传动杆,所述机箱内部的顶部连接有电机,所述机箱内部的底部的一侧连接有蓄电池,所述机箱内部的底部的另一侧连接有控制主机,所述齿条一侧的下端连接有支撑杆,两个所述支撑杆内侧共同连接有框架,所述框架底部连接有网兜。
7.作为本实用新型再进一步的方案:所述传动杆两端连接有传动齿轮,所述传动杆通过传动齿轮与齿条相连接,所述传动杆中部连接有从动齿轮。
8.作为本实用新型再进一步的方案:所述电机一端连接有主动齿轮,所述电机通过主动齿轮与从动齿轮相连接。
9.作为本实用新型再进一步的方案:所述连接板底部的一端连接有摄像头,所述连接板底部的中部连接有led灯管。
10.作为本实用新型再进一步的方案:所述浮板底部的两侧均连接有沙袋。
11.作为本实用新型再进一步的方案:所述摄像头、led灯管、电机通过控制主机与控制器相连接。
12.与现有技术相比,本实用新型的有益效果是:
13.通过电机和传动杆实现齿条的高速升降,能够带动框架和网兜随之进行升降,利用机械代替人力,能够有效地解放人力,同时通过摄像头和控制主机内部的识别程序,能够识别水面变化,在辨识到鱼群进入后能够启动升降系统将进入网兜的鱼从水中捞出,实现自动捕鱼,本实用新型易于安装和操作使用,能够利用自动化程序实现自动捕鱼操作,不仅
能够提高捕鱼效率,同时也能够解放人力,一个人即可完成多个装置的管理和控制。
附图说明
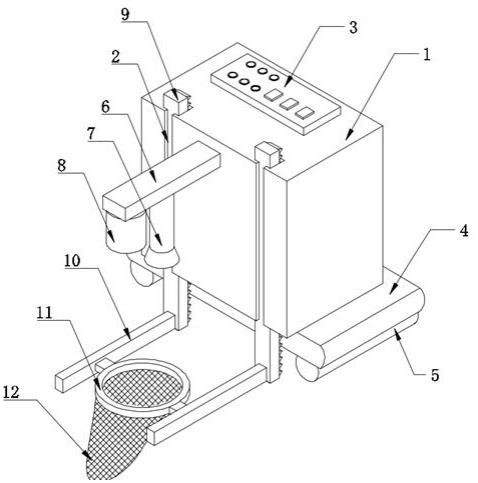
14.图1为一种机械自动化控制装置的结构示意图;
15.图2为一种机械自动化控制装置中机箱的剖面图;
16.图3为一种机械自动化控制装置中机箱的内部结构示意图。
17.图中:1、机箱;2、滑槽;3、控制器;4、浮板;5、沙袋;6、连接板;7、led灯管;8、摄像头;9、齿条;10、支撑杆;11、框架;12、网兜;13、蓄电池;14、控制主机;15、传动杆;16、电机;17、轴承座;18、主动齿轮;19、从动齿轮;20、传动齿轮。
具体实施方式
18.请参阅图1~3,本实用新型实施例中,一种机械自动化控制装置,包括机箱1,机箱1一侧开设有一组滑槽2,机箱1一侧通过滑槽2连接有一组齿条9,齿条9能够在滑槽2内进行滑动,机箱1一侧的上端通过焊接固定有连接板6,连接板6底部的一端连接有摄像头8,摄像头8能够每隔0.5秒拍摄一张下方的照片,并将数据传输至控制主机14内进行处理,连接板6底部的中部连接有led灯管7,led灯管7能够产生光线,照亮附近水面,不仅为摄像头8拍摄提供良好的光线条件,同时利用鱼群的趋光性吸引鱼群靠近,机箱1底部连接有浮板4,浮板4可选用eva塑料制成的板材,为装置整体提供足够的浮力,浮板4底部的两侧均连接有沙袋5,沙袋5能够增强浮板4在水面上的稳定性,减少装置晃动,齿条9一侧的下端焊接连接有支撑杆10,两个支撑杆10内侧共同连接有框架11,框架11底部连接有网兜12,通过齿条9可以带动支撑杆10进行垂直方向的移动,在网兜12内进入鱼群后,通过支撑杆10带动框架11向上提升,将鱼从水中捞出。
19.在图2中:机箱1顶部连接有控制器3,机箱1内部的底部的一侧安装固定有蓄电池13,机箱1内部的底部的另一侧固定安装有控制主机14,摄像头8、led灯管7、电机16通过控制主机14与控制器3相连接,通过控制器3和控制主机14对装置整体进行控制操作。
20.在图3中:机箱1内部的两侧连接有一组轴承座17,机箱1内部通过轴承座17连接有传动杆15,传动杆15能够在机箱1内部自由转动,传动杆15两端连接有传动齿轮20,传动杆15通过传动齿轮20与齿条9相连接,传动杆15中部连接有从动齿轮19,机箱1内部的顶部连接有电机16,电机16一端连接有主动齿轮18,电机16通过主动齿轮18与从动齿轮19相连接,在确认鱼进入网兜12后,通过电机16带动主动齿轮18高速转动,从而带动从动齿轮19和传动杆15在轴承座17内转动,通过传动杆15两端的传动齿轮20带动齿条9在滑槽2内垂直移动,实现机械驱动提升。
21.本实用新型的工作原理是:首先将装置整体放置到水面上,通过底部的浮板4和沙袋5保持装置在水面上稳定的漂浮,通过控制器3启动电机16,将齿条9和支撑杆10下调到水中,在网兜12中添加吸引鱼群的饵料,开启led灯管7,吸引鱼群靠近,通过摄像头8拍摄一张初始照片,摄像头8每隔0.5秒自动拍摄一张新的照片,通过机箱1内部的控制主机14对前后两张照片进行对比,利用编写的识别程序对照片内容进行识别分析,当系统判定网兜12中进入鱼群后,立即启动电机16,通过电机16向上提升网兜12,将网兜12拉出水面,实现自动判定捕鱼。
22.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种机械自动化控制装置,包括机箱(1),其特征在于,所述机箱(1)一侧开设有一组滑槽(2),所述机箱(1)一侧通过滑槽(2)连接有一组齿条(9),所述机箱(1)一侧的上端连接有连接板(6),所述机箱(1)顶部连接有控制器(3),所述机箱(1)底部连接有浮板(4),所述机箱(1)内部的两侧连接有一组轴承座(17),所述机箱(1)内部通过轴承座(17)连接有传动杆(15),所述机箱(1)内部的顶部连接有电机(16),所述机箱(1)内部的底部的一侧连接有蓄电池(13),所述机箱(1)内部的底部的另一侧连接有控制主机(14),所述齿条(9)一侧的下端连接有支撑杆(10),两个所述支撑杆(10)内侧共同连接有框架(11),所述框架(11)底部连接有网兜(12)。2.根据权利要求1所述的一种机械自动化控制装置,其特征在于,所述传动杆(15)两端连接有传动齿轮(20),所述传动杆(15)通过传动齿轮(20)与齿条(9)相连接,所述传动杆(15)中部连接有从动齿轮(19)。3.根据权利要求1所述的一种机械自动化控制装置,其特征在于,所述电机(16)一端连接有主动齿轮(18),所述电机(16)通过主动齿轮(18)与从动齿轮(19)相连接。4.根据权利要求1所述的一种机械自动化控制装置,其特征在于,所述连接板(6)底部的一端连接有摄像头(8),所述连接板(6)底部的中部连接有led灯管(7)。5.根据权利要求1所述的一种机械自动化控制装置,其特征在于,所述浮板(4)底部的两侧均连接有沙袋(5)。6.根据权利要求4所述的一种机械自动化控制装置,其特征在于,所述摄像头(8)、led灯管(7)、电机(16)通过控制主机(14)与控制器(3)相连接。
技术总结
本实用新型涉及自动化捕鱼设备领域,公开了一种机械自动化控制装置,包括机箱,所述机箱一侧开设有一组滑槽,所述机箱一侧通过滑槽连接有一组齿条,所述机箱一侧的上端连接有连接板,所述机箱顶部连接有控制器,所述机箱底部连接有浮板,所述齿条一侧的下端连接有支撑杆,两个所述支撑杆内侧共同连接有框架,所述框架底部连接有网兜。本实用新型通过电机和传动杆实现齿条的高速升降,能够带动框架和网兜随之进行升降,利用机械解放人力,同时通过摄像头和控制主机内部的识别程序,在辨识到鱼群后能够自动将鱼从水中捞出,利用自动化程序实现自动捕鱼操作,不仅能够提高捕鱼效率,同时也能够解放人力,一个人即可完成多个装置的管理和控制。理和控制。理和控制。
技术研发人员:高华栋
受保护的技术使用者:天津和汇能源科技发展有限公司
技术研发日:2020.11.05
技术公布日:2021/9/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1