一种自走式电动智能遥控粪污铲运机的制作方法
1.本实用新型涉及畜牧养殖粪污处理技术领域,具体是一种自走式电动智能遥控粪污铲运机。
背景技术:
2.随着畜牧养殖业的快速发展,养殖机械也越来也受到养殖户的欢迎,尤其畜禽粪便作为最主要的环境污染源,为了防止养殖环境污染和疾病发生,粪污要及时清理,为适应粪污清理工作量,市场上出现了机械化粪污清运。目前,粪污清运机通常利用燃油机作为动力源,虽然能够实现自动化清粪作业,但在清粪作业过程仍存在以下不足之处:(1)现有粪污清运机主要通过人工操作作业,由于圈舍内粪污气味大,人工长时间操作作业时产生的臭味会对人体健康造成一定的影响;(2)现有粪污清运机由于机身大、转弯半径大,且受到空间影响需要多次前进倒退才能完成转弯,使机体操作灵活性变差;(3)现有粪污清运机通常很难一次性完成铲粪、装车、运输作业,粪污清理过程至少需要两种不同的作业机械,不仅会增加养殖成本,而且影响粪污清理效率。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种自走式电动智能遥控粪污铲运机,能够实现遥控操作,减少人工操作时间,避免环境对人体健康的影响;还能实现原地369
°
转弯掉头,提升操作灵活性,并且通过推铲的升降功能一次性完成铲粪、装车、运输作业,提高粪污清理效率。
4.为解决上述问题,本实用新型所述的一种自走式电动智能遥控粪污铲运机,包括机架主体、操作台、车厢和铲斗,其特征在于:所述机架主体内设有电池组、电池组分别连接的控制器、遥控装置接收器和液压动力单元以及液压动力单元连接的液压油箱,该控制器、遥控装置接收器以及液压动力单元之间相互连接,且该控制器还连接有电机;所述电机连接直角齿轮箱,该直角齿轮箱连接有电磁离合式齿轮泵;所述电磁离合式齿轮泵连接左右转向离合分泵,且该左右转向离合分泵连接有方向机;所述直角齿轮箱的输出轴末端连接有左侧单边锁死转向变速箱,该左侧单边锁死转向变速箱通过连轴连接倒顺档转换齿轮箱,且该倒顺档转换齿轮箱另一侧连轴连接有右侧单边锁死转向变速箱;所述左侧单边锁死转向变速箱的输出轴端安装有一组并排设置的右侧主动链轮,所述右侧单边锁死转向变速箱的输出轴端安装有一组并排设置的左侧主动链轮;所述左侧主动链轮和右侧主动链轮分别通过两条传动链连接有前后设置的从动链轮,且该从动链轮的转轴末端分别安装有行走轮;所述机架主体上部后侧设有操作台,其后端下部设有脚踏板,且该操作台内侧方设有车厢;所述车厢的底部靠前位置处通过连接销轴与所述机架主体前端上部连接,且该车厢的底部居中处安装有车厢升降油缸;所述车厢左右两侧部底边相对应处分别设有铲头升降油缸,该铲头升降油缸的末端分别连接有“y”字形状的铲头连接臂;所述铲头连接臂的上分叉内臂通过转轴连接于所述车厢两侧部底边,且下分叉臂末端分别与所述铲斗的斗背两侧
相连接。
5.所述电池组连接有电源开关,该电源开关安装于所述操作台上。
6.所述液压动力单元设为sd型整体式多路阀,其各路电磁阀通过控制线路i连接有液压控制旋钮,该液压控制旋钮安装于所述操作台上,且该液压控制单元通过多路油管分别与所述车厢升降油缸和铲头升降油缸相连接控制。
7.所述控制器连接有控制踏板,该控制踏板安装于所述脚踏板上。
8.所述遥控装置接收器连接遥控开关,该遥控开关安装于所述操作台上。
9.所述左侧单边锁死转向变速箱和右侧单边锁死转向变速箱上分别设有旋转操作杆,该旋转操作杆通过转换连杆安装有旋转操作手柄,且该旋转操作手柄安装于所述操作台上。
10.所述倒顺档转换齿轮箱上安装有变档操作杆,该变档操作杆连接有变档操作手柄,且该变档操作手柄安装于所述操作台上。
11.所述从动链轮的后方一组内侧安装有刹车装置,该刹车装置连接有刹车杆,且该刹车杆安装于所述操作台其中一侧部。
12.所述车厢的后端部上沿边通过连接销轴安装有厢门,其下沿边处设有闭门钩,所述车厢在平置过程中,该闭门钩将卡住厢门,所述车厢在倾斜卸粪过程中,该厢门将脱离闭门钩,厢门下边将被打开卸粪。
13.本实用新型与现有技术相比具有以下优点:
14.(1)本实用新型采用电池组作为动力源,使机型具有节能环保的优点。
15.(2)本实用新型通过电池组连接控制器和遥控装置接收器,利用控制器控制电机,开启遥控装置接收器后,遥控器向其发出指令后控制电机和液压动力单元进行工作,代替人工控制各功能单元电路,实现智能遥控操作,减少人工操作时间,避免环境对人体健康的影响。
16.(3)本实用新型采用滑移转向原理,通过控制左右转向离合分泵带动电磁离合式齿轮泵,分离左侧单边锁死转向变速箱和右侧单边锁死转向变速箱,实现作业平台在行走过程中转向,使转向方便快捷。
17.(4)本实用新型通过控制旋转操作手柄,由左、右的旋转操作杆操作倒顺档转换齿轮箱,使其一侧连轴带动左侧单边锁死转向变速箱正向旋转,另一侧连轴带动右侧单边锁死转向变速箱反向旋转,左侧单边锁死转向变速箱和右侧单边锁死转向变速箱分别带到右侧主动链轮与右侧主动链轮反方向旋转,实现原地旋转转向,使提升操作灵活性。
18.(5)本实用新型通过在机架主体上部设有车厢,车厢两侧设置铲斗,充分利用机架主体遥控自走功能的同时通过遥控装置接收器接收遥控指令传送给液压动力单元完成各路液压阀的关闭开启,并结合液压油箱的给油和断油,实现车厢底部设置的车厢升降油缸和车厢侧部设置的铲斗升降油缸的升降作业,使其能够一次性完成铲粪、装车、运输作业,提高粪污清理效率。
附图说明
19.下面结合附图对本实用新型的具体实施方式作进一步详细的说明。
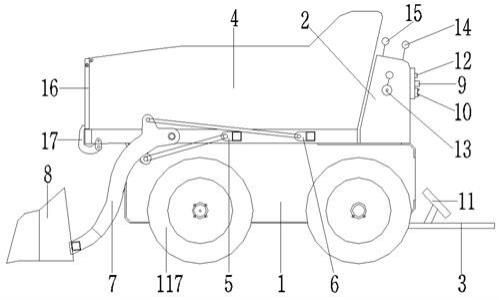
20.图1为本实用新型的侧视结构示意图;
21.图2为本实用新型的机架主体传动结构示意图。
22.图中:1.机架主体,101.电池组,102.控制器,103.遥控装置接收器,104.液压动力单元,105.液压油箱,106.电机,107.直角齿轮箱,108.电磁离合式齿轮泵,109.左右转向离合分泵,110.方向机,111.左侧单边锁死转向变速箱,112.倒顺档转换齿轮箱,113.右侧单边锁死转向变速箱,114.右侧主动链轮,115.左侧主动链轮,116.从动链轮,117.行走轮,118.旋转操作杆,119.变档操作杆,120.刹车装置,2.操作台,3.脚踏板,4.车厢,5.车厢升降油缸,6.铲头升降油缸,7.铲头连接臂,8.铲斗,9.电源开关,10.液压控制旋钮,11.控制踏板,12.遥控开关,13.旋转操作手柄,14.变档操作手柄,15.刹车杆,16.厢门,17.闭门钩。
具体实施方式
23.如图1、2所示,一种自走式电动智能遥控粪污铲运机,包括机架主体1、操作台2、车厢4和铲斗8,机架主体1内设有电池组101、电池组101分别连接的控制器102、遥控装置接收器103和液压动力单元104以及液压动力单元104连接的液压油箱105,该控制器102、遥控装置接收器103以及液压动力单104元之间相互连接,且该控制器102还连接有电机106;电机106连接直角齿轮箱107,该直角齿轮箱107连接有电磁离合式齿轮泵108;电磁离合式齿轮泵108连接左右转向离合分泵109,且该左右转向离合分泵109连接有方向机110;直角齿轮箱107的输出轴末端连接有左侧单边锁死转向变速箱111,该左侧单边锁死转向变速箱111通过连轴连接倒顺档转换齿轮箱112,且该倒顺档转换齿轮箱112另一侧连轴连接有右侧单边锁死转向变速箱113;左侧单边锁死转向变速箱111的输出轴端安装有一组并排设置的右侧主动链轮114,右侧单边锁死转向变速箱113的输出轴端安装有一组并排设置的左侧主动链轮115;左侧主动链轮115和右侧主动链轮114分别通过两条传动链连接有前后设置的从动链轮116,且该从动链轮116的转轴末端分别安装有行走轮117;从动链轮116的后方一组内侧安装有刹车装置120,该刹车装置120连接有刹车杆15,且该刹车杆15安装于操作台2其中一侧部;机架主体1上部后侧设有操作台2,其后端下部设有脚踏板3,且该操作台2内侧方设有车厢4;车厢4的后端部上沿边通过连接销轴安装有厢门16,其下沿边处设有闭门钩17;车厢4的底部靠前位置处通过连接销轴与机架主体1前端上部连接,且该车厢4的底部居中处安装有车厢升降油缸5;车厢4左右两侧部底边相对应处分别设有铲头升降油缸6,该铲头升降油缸6的末端分别连接有“y”字形状的铲头连接臂7;铲头连接臂7的上分叉内臂通过转轴连接于车厢4两侧部底边,且下分叉臂末端分别与铲斗8的斗背两侧相连接。
24.优选地,该电池组101连接有电源开关9,电源开关9安装于操作台2上;该控制器102连接有控制踏板11,控制踏板11安装于脚踏板3上;该左侧单边锁死转向变速箱111和右侧单边锁死转向变速箱113上分别设有旋转操作杆118,旋转操作杆118通过转换连杆安装有旋转操作手柄13,旋转操作手柄13安装于操作台2上;该倒顺档转换齿轮箱112上安装有变档操作杆14,变档操作杆119连接有变档操作手柄14,且变档操作手柄14安装于操作台2上。
25.本实用新型的工作原理可分为行走系统原理、转向系统原理、液压升降系统原理、遥控无人驾驶系统原理:
26.行走系统原理为:操作控制踏板11和变档操作杆14,通过控制器102控制电机106工作,动能通过直角齿轮箱107传送,利用变档操作手柄14和旋转操作手柄13分别通过变档
操作杆119、旋转操作杆118将左侧单边锁死转向变速箱111、倒顺档转换齿轮箱112、右侧单边锁死转向变速箱113调整至空档档位,使动力分别传送至左侧主动链轮115和右侧主动链轮114,然后通过链条带动左右侧前后的从动链轮116转动,并带动行走轮117行走,实现四轮驱动行走;
27.转向系统原理为:当自走过程需要转向时,通过遥控器控制方向机110,带动左右转向离合分泵109工作,传递左右方向指令于电磁离合式齿轮泵108,根据转向方向,将左侧单边锁死转向变速箱111或右侧单边锁死转向变速箱113其中一个锁死实现机架主体1在行走过程中转向功能;当需要原地旋转转向时,通过控制变档操作手柄14,操作倒顺档转换齿轮箱112的左右输出轴倒档机构,使其一侧输出轴反向旋转,另一侧输出轴正向旋转,并分别通过左侧单边锁死转向变速箱111、右侧单边锁死转向变速箱113向右侧主动链轮114和左侧主动链轮115输出反向动力,实现行走轮117原地旋转;
28.液压升降系统原理为:当需要升降铲斗8进行铲粪或装粪时,先开启液压控制旋钮10,通过电池组101连接液压动力单元104,使整个控制单元工作,根据需要打开车厢升降油缸5和铲斗升降油缸6的多路阀,当开启铲斗升降油缸6多路阀时,铲斗升降油缸6延伸,带动铲头连接臂7下降至水平,利用行走系统原理使机架主体1前进过程铲斗8进行铲粪作业;当铲粪作业过程需要转弯或原地转动时,可以通过转向系统原理控制行走轮117实现转向或原地旋转;当铲粪作业完成后,通过关闭铲斗升降油缸6的多路阀使其油缸回缩,带动铲头连接臂7上升至竖直方向,使铲斗8内倾将粪污倒入车厢4内;依次反复作业至车厢4内粪污装满后时,通过行走系统原理使机架主体1将车厢4内的粪污运输到粪污卸载处,然后开启车厢升降油缸5的多路阀使其油缸延伸,带动车厢4前部上升,当车厢升降油缸5延伸值最大时厢门16将自动脱离闭门钩17,车厢4内的粪污将倾斜倒出进行卸粪作业;当完成卸粪作业时,关闭车厢升降油缸5的多路阀使油缸回缩,带动车厢4前部下降至水平,回缩值为最小时,厢门16自动卡入闭门钩17内继续进行运输铲粪作业,以上作业过程可以通过人工手动操作完成,也可以通过遥控器控制液压动力单元104进行作业。
29.遥控无人驾驶系统原理为:通过遥控器发出指令,遥控装置接收器103接收到命令后通过控制器102控制电机106、液压动力单元104控制车厢升降油缸5和铲斗升降油缸6,电机106控制左侧单边锁死转向变速箱111、倒顺档转换齿轮箱112、右侧单边锁死转向变速箱113等单元的不同档位工作,实现行走系统、转向系统和液压升降系统的智能遥控作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1