一种用于犊牛饲喂的精确投料和采食监控系统
1.本实用新型涉及畜牧机械技术领域,尤其涉及一种用于犊牛饲喂的精确投料和采食监控系统。
背景技术:
2.犊牛采食属于饲养的一个环节,采食饲料的质量把控关乎着最终生牛的质量和价格,是社会经济中的重要一环,也是牛养殖产业的关键一步。犊牛在出生后,经过饲喂初乳阶段后,应尽早使犊牛采食犊牛草料,以利于犊牛生长。在犊牛生长初期阶段,对于饲喂草料的营养配比以及投喂次数、每次投喂质量都有严格的要求,同时养殖人员也需要对犊牛单次采食质量、单日采食次数、饲料利用率等养殖信息进行全面掌握,因此在犊牛饲喂阶段,有必要对饲喂草料的投料量以及单个犊牛的每次采食质量、单个犊牛单位时间的采食次数、饲料利用量进行精确监控,以实现对犊牛的精细化饲养。
3.现有的犊牛饲喂方式主要有以下三类:(1)人工投料,犊牛自行食料。人工将犊牛饲喂草料投料至饲喂槽,由犊牛自行采食;(2)人工结合草料输送带投料,犊牛自行食料。通过草料输送带将犊牛饲喂草料运送至饲喂槽前,人工进行投料,犊牛自行食料;(3)草料输送带循环进行犊牛饲喂草料输送,犊牛自行食料。
4.上述方法主要存在三个方面的问题:(1)人工投料多依赖于饲喂人员的经验,对于投料量的把控在不同投料环境下会有偏差,不能保证每次投料都严格按照配比质量进行投料,且人工投料效率低,投料不均匀,草料浪费大;(2)草料输送带循环输送犊牛饲喂草料,犊牛采食时,会受到惊扰,影响犊牛的有效采食量;(3) 犊牛自行食料过程中,个体犊牛单次采食质量及采食次数都有不同,饲喂人员无法全面掌握所有犊牛的采食信息,不能进行个性化精确饲喂方案制定。现有的犊牛饲喂方式,虽然已经实现草料配方营养配比,投料过程中有草料输送带参与,大大节省了劳动力,但仍存在无法实现精确投料,对犊牛的采食信息无法有效监控的问题。
技术实现要素:
5.有鉴于此,本实用新型提供一种用于犊牛饲喂的精确投料和采食监控系统,主要目的在于改善投料的精确性,掌握犊牛的采食信息。
6.为达到上述目的,本实用新型主要提供如下技术方案:
7.本实用新型的实施例提供一种用于犊牛饲喂的精确投料和采食监控系统,包括:机架、草料输送系统、推料系统、投料控制系统及网络监控系统;
8.草料输送系统包括:草料输送机构和限高机构;
9.所述草料输送机构设置在所述机架上;
10.所述限高机构设置在所述机架上,位于所述草料输送机构的一侧,用于限定所述草料输送机构上物料的高度;
11.所述推料系统设置在所述机架上,位于所述草料输送机构的一侧,用于推送所述
草料输送机构上的草料;所述推料系统为多个;多个所述推料系统沿所述草料输送机构的输送方向间隔设置;
12.所述推料系统包括:纵向移动机构、横向移动机构和推板;
13.所述纵向移动机构固定地设置在所述机架上;
14.所述横向移动机构设置在所述纵向移动机构上,能够被所述纵向移动机构驱动上下移动;
15.所述推板设置在所述横向移动机构上,能够被所述横向移动机构驱动在所述草料输送机构的上方横向移动,以将草料拨离所述草料输送机构;所述推板的移动方向与所述草料输送机构的输送方向垂直;
16.所述投料控制系统包括:称重机构、饲喂容器和投料控制机构;
17.所述称重机构包括:支架、称重传感器、水平仪和数据采集模块;
18.所述称重传感器固定地设置在所述支架上;
19.所述水平仪固定地设置在所述支架上;
20.所述数据采集模块固定地设置在所述支架上,分别与所述称重传感器和所述水平仪连接;
21.所述饲喂容器设置在所述称重传感器上;所述饲喂容器位于所述草料输送机构的一侧,用于接收被所述推料系统推出所述草料输送机构的物料;所述饲喂容器为多个;所述饲喂容器与所述推料系统一一对应设置;
22.所述投料控制机构设置在所述饲喂容器的一侧,用于抓取所述饲喂容器中的物料;
23.所述投料控制机构包括:投料驱动组件和饲料抓手;
24.所述投料驱动组件设置在所述机架上;
25.所述饲料抓手设置在所述投料驱动组件上,被所述投料驱动组件驱动抓取所述饲喂容器内的物料;
26.所述网络监控系统分别与所述草料输送系统、所述推料系统和所述投料控制系统连接,以进行信息采集和控制。
27.进一步地,所述限高机构包括:丝杆组件一、限高板和步进电机一;
28.所述丝杆组件一设置在所述机架上;
29.所述限高板固定地设置在所述丝杆组件一上,能够被所述丝杆组件一驱动上下移动;
30.所述步进电机一设置在所述机架上,与所述丝杆组件一传动连接。
31.进一步地,所述饲料抓手能够将抓取的物料放置在所述草料输送系统上;所述饲料抓手放置物料的位置位于所述限高板的前端。
32.进一步地,所述草料输送机构为带式输送机;
33.所述草料输送机构的输送带被构造成环形;所述输送带水平设置。
34.进一步地,所述输送带为一个或多个;
35.多个所述输送带首尾相接,形成环形。
36.进一步地,所述饲喂容器的下端设置有球面凸起;
37.所述称重传感器的上端设置有球面凹坑,以与所述球面凸起匹配,对所述饲喂容
器进行称重;
38.所述支架上设置有弹性复位构件;所述弹性复位构件水平设置,以将所述饲喂容器进行水平方向复位。
39.进一步地,所述支架上固定地设置有隔板;所述隔板水平设置;所述隔板位于所述称重传感器与所述饲喂容器之间,在所述饲喂容器被移动时,所述球面凸起脱离所述球面凹坑,被所述隔板支撑。
40.进一步地,所述限高板的下端设置有辊轴;所述辊轴能够相对所述限高板转动;所述辊轴的下端较所述限高板的下端低。
41.进一步地,所述推板的下端设置有橡胶条;
42.所述橡胶条的下端为锯齿结构。
43.借由上述技术方案,本实用新型用于犊牛饲喂的精确投料和采食监控系统至少具有下列优点:
44.能够改善投料的精确性,掌握犊牛的采食信息。
45.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
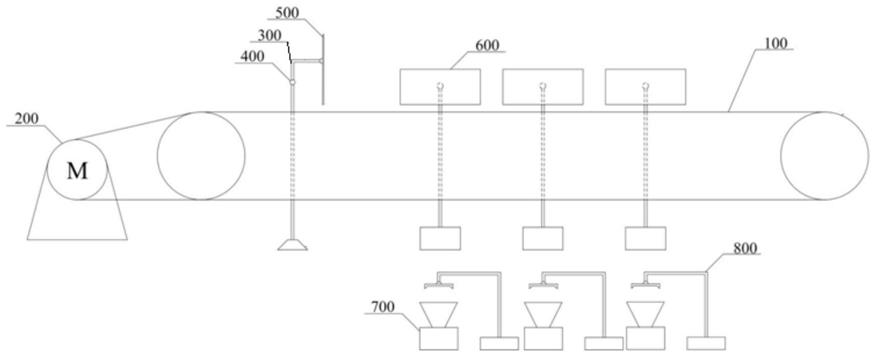
46.图1为本实用新型实施例提供的一种用于犊牛饲喂的精确投料和采食监控系统的示意图;
47.图2为本实用新型实施例提供的一种用于犊牛饲喂的精确投料和采食监控系统中推料系统的结构示意图;
48.图3为本实用新型实施例提供的一种用于犊牛饲喂的精确投料和采食监控系统中推料系统中投料控制系统的结构示意图;
49.图4为本实用新型实施例提供的一种用于犊牛饲喂的精确投料和采食监控系统中推料系统中网络监控系统的结构示意图;
50.图5为本实用新型另一实施例提供的一种用于犊牛饲喂的精确投料和采食监控系统中推料系统中投料控制系统的结构示意图。
51.图中所示:
52.100
‑
草料输送机构,200
‑
三相异步电动机,300
‑
丝杆组件一,400
‑
步进电机一,500
‑
限高板,600
‑
推料系统,601
‑
推板,602
‑
丝杆组件二,603
‑
步进电机二, 604
‑
滑杆组件,605
‑
步进电机三,607
‑
限位开关一,608
‑
限位开关二,700
‑‑
称重机构,701
‑
隔板,702
‑
饲喂容器,703
‑
弹性复位构件,704
‑
支架,706
‑
数据采集模块,707
‑
显示屏,708
‑
水平仪,709
‑
称重传感器,711
‑
lora模块,800
‑
投料控制机构,801
‑
饲料抓手,802
‑
投料驱动组件,900
‑
lora网关,110
‑
上位pc机, 120
‑
计算机集控数据平台。
具体实施方式
53.为更进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型申请的具体实施方式、结构、特征及其功
效,详细说明如后。在下述说明中,不同的“一实施例”或“实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
54.如图1至图4所示,本实用新型的一个实施例提出的一种用于犊牛饲喂的精确投料和采食监控系统,包括:机架、草料输送系统、推料系统600、投料控制系统及网络监控系统;机架可以为框架结构,可以为成型钢材焊接或紧固而成,也可以为地面等支撑物。
55.草料输送系统包括:草料输送机构100和限高机构;草料输送机构100设置在机架上;草料输送系统包括输送带和三相异步电动机200;三相异步电动机200 用于驱动输送带;
56.限高机构设置在机架上,位于草料输送机构100的一侧,用于限定草料输送机构100上物料的高度;本实施例优选,限高机构包括:丝杆组件一300、限高板 500和步进电机一400;
57.丝杆组件一300设置在机架上;限高板500固定地设置在丝杆组件一300上,能够被丝杆组件一300驱动上下移动;步进电机一400设置在机架上,与丝杆组件一300传动连接。步进电机一400通过丝杆组件一300带动限高板500上下移动。步进电机一400的动作可以通过单片机控制。
58.推料系统600设置在机架上,位于草料输送机构100的一侧,用于推送草料输送机构100上的草料;推料系统600为多个;多个推料系统600沿草料输送机构100的输送方向间隔设置;
59.推料系统600包括:纵向移动机构、横向移动机构和推板601;纵向移动机构固定地设置在机架上;纵向移动机构包括:丝杆组件二602和步进电机二603;步进电机二603与丝杆组件二602传动连接,以驱动丝杆组件二602动作;
60.横向移动机构设置在纵向移动机构上,能够被纵向移动机构驱动上下移动;横向移动机构包括:滑杆组件604和步进电机三605;步进电机三605与滑杆组件 604传动连接;滑杆组件604设置在纵向移动机构上,被纵向移动机构驱动上下移动;滑杆组件604可以为齿轮齿条结构。
61.机架上设置有限位开关一607和限位开关二608,限位开关一607和限位开关二608分别设置在输送带的两侧,以限定推板601的移动范围。步进电机二603 和步进电机三605可以通过单片机控制。
62.推板601设置在横向移动机构上,能够被横向移动机构驱动在草料输送机构 100的上方横向移动,以将草料拨离草料输送机构100;推板601的移动方向与草料输送机构100的输送方向垂直;
63.投料控制系统包括:称重机构700、饲喂容器702和投料控制机构800;称重机构700包括:支架704、称重传感器709、水平仪708和数据采集模块706;称重传感器709固定地设置在支架704上,用于采集饲喂容器702的重量数据;水平仪708固定地设置在支架704上,用于采集支架704的倾斜数据;数据采集模块706固定地设置在支架704上,分别与称重传感器709和水平仪708连接;数据采集模块706含单片机和lora模块711;支架704上设置有显示屏707;显示屏707优选为oled显示屏707。水平仪708检测饲喂容器702是否与基准面水平,称重传感器709采集各个饲喂容器702中的投料质量信号;数据采集板(含单片机3和lora模块711)将质量信号转化为电信号给lora模块711,lora模块711 通过无线方式将信号传输至
lora网关900;lora网关900通过usb方式与上位pc 机110通讯,上位pc机110将接收的各类电信号在计算机集控数据平台120统一汇集、处理和发出,上位pc机110通过lora网关900向lora模块711传输控制指令,lora模块711接收到控制指令后给单片机输入,由单片机控制各个步进电机驱动执行相应动作。
64.饲喂容器702设置在称重传感器709上;饲喂容器702位于草料输送机构100 的一侧,用于接收被推料系统600推出草料输送机构100的物料;饲喂容器702 为多个;饲喂容器702与推料系统600一一对应设置;
65.投料控制机构800设置在饲喂容器702的一侧,用于抓取饲喂容器702中的物料;投料控制机构800包括:投料驱动组件802和饲料抓手801;投料驱动组件 802设置在机架上;饲料抓手801设置在投料驱动组件802上,被投料驱动组件 802驱动抓取饲喂容器702内的物料;投料控制机构800可以为机械手。
66.网络监控系统分别与草料输送系统、推料系统600和投料控制系统连接,以进行信息采集和控制。网络监控系统包括:lora网关900、上位pc机110及计算机集控数据平台120;
67.草料输送系统将草料沿输送带进行输送,输送带始端上部设置限高板500,限高板500由单片机控制步进电机一400驱动,可上、下调整其限高位置;当输送带将草料向前输送时,始端限高板500由步进电机一400驱动至合适位置,可对输送带上的草料进行平推、限高;草料经过限高板500推平后送至推料系统600,推料系统600的每个推板601由两个步进电机进行驱动控制,步进电机三605控制推板601在前后方向运动,步进电机二603控制推板601在上、下方向运动;步进电机二603和步进电机三605由单片机发出控制信号,推板601先由单片机控制步进电机三605驱动向前,将输送带上的草料推进犊牛饲喂容器702的同时触碰限位开关一607,关闭步进电机三605,单片机控制步进电机二603将推板601 抬高至一定高度后关闭步进电机二603,而后单片机控制步进电机三605将草料推板601收回,之后单片机关闭步进电机三605,控制步进电机二603将草料推板 601降至原来位置,重复上述过程进行下一次推料;草料经推板601推入犊牛饲喂容器702后启动投料控制系统,称重机构700通过称重传感器709由a/d转换为数字信号送给单片机,单片机将数据传给lora模块711,通过无线信号给lora网关900,上位pc机110通过系统设定值与传回数据对比,若未超出投料设定值,则通过lora模块711传送指令给单片机,继续控制推料系统600将草料输送带上的草料继续推入饲喂容器702,若超出投料设定值,将通过lora模块711传送指令给单片机,控制饲料抓手801抓取草料,直到称重传感器709测量数据达到投料设定值后停止;网络监测系统汇总称重机构700的数据,通过上位pc机110中的计算机集控数据平台120对各个饲喂容器702中的投料质量、单个犊牛的每次采食质量、单个犊牛单位时间的采食次数、饲料利用量等关键数据进行监控。
68.本实用新型的一个实施例提出的一种用于犊牛饲喂的精确投料和采食监控系统,能够改善投料的精确性,掌握犊牛的采食信息。
69.本实用新型的一个实施例提出的一种用于犊牛饲喂的精确投料和采食监控系统,实现了对犊牛饲喂过程中的输送草料量、单个犊牛饲喂容器中的投料质量、单个犊牛的每次采食质量、单个犊牛单位时间的采食次数、饲料利用量等关键参数的全流程可视化,具有关键参数可控可调、设备成本低等突出优势,为犊牛投料、采食过程优化与监测提供良好借鉴。
70.应用本实用新型的一个实施例提出的一种用于犊牛饲喂的精确投料和采食监控系统,可以采用如下步骤:
71.s1:启动三相异步电动机200驱动草料输送系统的输送带运转,人工或出料机将待饲喂草料投送至输送带的始端;
72.s2:利用上位pc机110的计算机集控数据平台120设置输送带上部的限高板500的高度,单片机接收到控制指令后控制步进电机一400驱动限高板500至指定位置,将输送带上输送的草料推平,此时可根据相应的限高板500高度,由计算机集控数据平台120计算出输送带上单位时间的输送草料量。设限高板500 的设置高度为h米,输送带的宽度为b,草料输送带的速度为v米/分钟,草料输送带的运转时间为t分钟,输送草料的密度为ρ千克/立方米,则输送草料量为 m=bvthρ千克;
73.s3:打开上位pc机110的计算机集控数据平台120,启动网络监测系统,人工输入此次犊牛饲喂的单次饲喂草料质量,为了避免执行机构频繁动作,网络监测系统在进行监测时,允许实际数值与设定数值上下浮动5%;
74.s4:单片机根据上位pc机110设置的犊牛饲喂草料质量,控制步进电机三605 驱动单个草料推板601向前运动,将草料输送带上的草料推进单个犊牛饲喂容器 702,草料推板601向前运动至极限位触碰限位开关一607,单片机关闭步进电机三605,启动步进电机二603将草料推板601抬高至一定高度后,关闭步进电机二 603,重启步进电机三605,驱动草料推板601收回,收回至极限位触碰限位开关二608,单片机再次关闭步进电机三605,启动步进电机二603,驱动草料推板601 下将至原来位置,重复上述过程进行下一次推料;
75.s5:草料经推板601推入饲喂容器702后启动投料控制系统,实时称重机构 700通过称重传感器709由a/d转换为数字信号送给单片机,单片机驱动oled显示屏707进行实时质量显示,同时将数据传给lora模块711,通过无线信号给lora 网关900,实现数据的可视化和实时监控;
76.s6:上位pc机110通过草料质量设定值与传回数据对比,若未超出投料设定值(
±
5%),则通过lora模块711传送指令给单片机2,继续控制推料系统600 将输送带上的草料继续推入饲喂容器702,若超出设定值(
±
5%),将通过lora 模块711传送指令给单片机,单片机停止推料系统600工作,同时传送指令给饲料抓手801抓取草料,直到达到设定值范围之内,上位pc机110发出停止信号,终止饲料抓手801工作;
77.s7:犊牛采食草料时,网络监测系统实时接收称重机构700的上传数据,通过对称重传感器709所检测的犊牛饲喂容器702中的草料质量数据进行对比,判断犊牛是否开始采食以及单次采食过程是否结束。假设计算机集控数据平台120 接收的犊牛饲喂容器702中的草料质量数据为m1千克,且此数据在t1=10分钟内无变化,则将此质量数据设定为一次采食的起始数据,此后,网络监测系统实时接收称重传感器709所检测的质量数据为m2千克,如果m1‑
m2>3%m1,计算机集控数据平台120则判定犊牛开始一次饲喂,并启动单片机内部计时器开始计时,直到m2在t2=3分钟内无变化时,计算机集控数据平台120判断犊牛单次采食结束,停止单片机内部计时器计时,并计算此过程时间间隔δt,以δt记为单个犊牛的每次采食时间,同时启动单片机内部计数器进行一次计数n,计算机集控数据平台120计算犊牛饲喂容器702起始质量m1与采食结束时的质量m2的差值作为单个犊牛的单次采食质量,即单次采食质量:δm=m1‑
m2。以24小时作为计量单位,计算机集控数据平台120可记录单个犊
牛的单次采食质量δm,单次采食时间δt,采食次数n,将单个犊牛的单次采食质量相加即可得到总采食量δm,即δm=δm1+δm2+
…
+δm
n
,将每个犊牛的日总采食量相加即可得到养殖场的日总采食量m2,即m2=δm1+δm2+
…
+δm
n
,单日的饲料利用率为
78.作为上述实施例的优选,饲料抓手801能够将抓取的物料放置在草料输送系统上;饲料抓手801放置物料的位置位于限高板500的前端,以使被饲料抓手801 抓取的物料能够再次回到输送带上,进行饲喂。
79.作为上述实施例的优选,机架上设置有位置传感器,用于检测草料输送系统上物料的位置;位置传感器与网络监控系统连接,以方便对草料进行推送。位置传感器可以为红外传感器,以检测物料的位置。
80.作为上述实施例的优选,草料输送机构100为带式输送机;草料输送机构100 的输送带被构造成环形;输送带水平设置,以使没有被推送到草料能够再次转至推送位置。进一步优选,输送带为一个或多个;多个输送带首尾相接,形成环形,以首尾相接对物料形成环形输送。当然,草料输送机构100也可以为普通皮带输送机;输送带被两个输送辊支撑驱动,对物料进行输送。
81.作为上述实施例的优选,参考图5,饲喂容器702的下端设置有球面凸起;称重传感器709的上端设置有球面凹坑,以与球面凸起匹配,对饲喂容器702进行称重;球面凸起与球面凹坑一一对应设置;可以为一个或多个;优选为四个;
82.支架704上设置有弹性复位构件703;弹性复位构件703水平设置,以将饲喂容器702进行水平方向复位,使球面凸起进入球面凹坑与球面凹坑匹配;减少犊牛在进食时对饲喂容器702的挤压造成称重传感器709的损伤。饲喂容器702在受到侧向力时,球面凸起即可从球面凹坑中滑出,避免对称重传感器709的挤压,在饲喂容器702的受力消失后,在弹性复位构件703的作用下,饲喂容器702回复至原始位置,可以对物料进行称重。弹性复位构件703可以为弹簧等。
83.作为上述实施例的优选,支架704上固定地设置有隔板701;隔板701水平设置;隔板701位于称重传感器709与饲喂容器702之间,在饲喂容器702被移动时,球面凸起脱离球面凹坑,被隔板701支撑,以使饲喂容器702受到侧向力时,不会挤压称重传感器709。隔板701上具有可供球面凸起穿过的孔。
84.作为上述实施例的优选,限高板500的下端设置有辊轴;辊轴能够相对限高板500转动;辊轴的下端较限高板500的下端低,以对输送带上的物料高度进行限定,且可以防止对物料造成堆积推动。
85.作为上述实施例的优选,推板601的下端设置有橡胶条;橡胶条的下端为锯齿结构,以减少对输送带的磨损。
86.进一步说明,虽然术语第一、第二等在本文中可以用于描述各种元件,但是这些术语不应该限制这些元件。这些术语仅用于区别一个元件与另一元件。例如,第一元件可以被称为第二元件,并且,类似地,第二元件可以被称为第一元件,这些术语仅用于区别一个元件与另一元件。这没有脱离示例性实施例的范围。类似地,元件一、元件二也不代表元件的顺序,这些术语仅用于区别一个元件与另一元件。如本文所用,术语“和/或”包括一个或多个相关联的列出项目的任意结合和所有结合。
87.在本实用新型的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
88.本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
89.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1