割草机的制作方法
1.本实用新型涉及一种割草机,属于园林工具领域。
背景技术:
2.目前,电驱动站立式零转向割草机正逐渐取代传统的汽油驱动站立式零转向割草机,其操控方式与传统汽油驱动站立式零转向割草机完全相同。
3.由于操作者是站立式驾驶,操作者的双手必须始终握紧扶手来维持身体平衡,而在前进和后退进行切换时,操作者需要换手握住前后不同的扶手才能切换操纵杆方向,在零转向转弯时更是需要左右分别操纵并且反向操作,给操作者带来了极大的不便。
4.有鉴于此,确有必要提出一种割草机,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种割草机,使得操控更加方便安全。
6.为实现上述目的,本实用新型提供了一种割草机,包括:主体部,所述主体部包括行走轮和电机,所述电机驱动所述行走轮行走;支撑部,所述支撑部连接在主体部上,供操作者双手握持;操作部,用以调节所述电机的转速和/或转向,所述操作部连接在所述支撑部上,且所述操作部被配置为在操作者握持所述支撑部时能够被操作。
7.作为本实用新型的进一步改进,所述操作部设有一对,并分别具有检测件以及与所述检测件电气连接的接插件,所述检测件用于根据操作者手部操作产生的位移发出操作信号。
8.作为本实用新型的进一步改进,所述检测件为电位计式传感器,可根据手部操作的幅度产生不同的位移并输出相应的电压值,所述位移包括线位移和/或角位移。
9.作为本实用新型的进一步改进,所述割草机还设有控制器,所述控制器通过所述接插件与所述操作部建立电气连接,根据所述检测件发出的操作信号向割草机发出控制指令,所述控制指令包括前进/后退指令、转弯指令以及零转向指令。
10.作为本实用新型的进一步改进,所述操作者的手部操作包括左右手同向操作所述一对操作部和左右手以相反方向操作所述一对操作部。
11.作为本实用新型的进一步改进,所述同向操作包括自初始位置移向前端位置的顺时针方向操作以及自初始位置移向后端位置的逆时针方向操作;
12.所述相反方向操作包括左手逆时针方向操作的同时右手顺时针方向操作,以及左手顺时针方向操作的同时右手逆时针方向操作。
13.作为本实用新型的进一步改进,当左右手同向操作相同幅度时,所述控制指令为前进/后退指令;
14.当左右手同向操作不同幅度时,所述控制指令为转弯指令;
15.当左右手以相反方向操作相同幅度时,所述控制指令为零转向指令。
16.作为本实用新型的进一步改进,所述一对操作部分别具有一个拇指卡槽,操作者
可以将手指放入所述拇指卡槽并拨动所述拇指卡槽以进行顺时针方向操作或逆时针方向操作;所述一对操作部还分别具有一个弹性组件,所述弹性组件用于将所述拇指卡槽复位至初始位置。
17.作为本实用新型的进一步改进,所述拇指卡槽可围绕所述一对操作部旋转并产生角位移,所述拇指卡槽相较于初始位置的旋转角度为
‑
30
°
~30
°
。
18.作为本实用新型的进一步改进,所述支撑部包括第一握持部和第二握持部,所述拇指卡槽镜像对称设置在所述第一握持部和所述第二握持部上。
19.作为本实用新型的进一步改进,所述支撑部为一个一体构件,所述第一握持部和第二握持部为水平倾斜且镜像对称设置,所述第一握持部和第二握持部在连接处的夹角为钝角。
20.作为本实用新型的进一步改进,所述支撑部为分体设置,所述第一握持部和第二握持部为竖直倾斜且镜像对称设置,所述第一握持部和第二握持部呈n型。
21.作为本实用新型的进一步改进,所述一对操作部设置在所述支撑部的两端。
22.作为本实用新型的进一步改进,还包括一对安全开关,所述一对安全开关用于控制所述割草机的电磁刹车的通断,并分别与所述一对操作部建立物理和电气连接,以使得操作者需要先按动所述一对安全开关以后才能操作所述一对操作部,从而操控所述割草机完成相应的动作。
23.本实用新型的有益效果是:本实用新型结构简单且仅需手部进行小幅度动作即可操控割草机的前进/后退、转弯和零转向,有效地保持人体重心稳定与平衡,使得操控更加方便安全。
附图说明
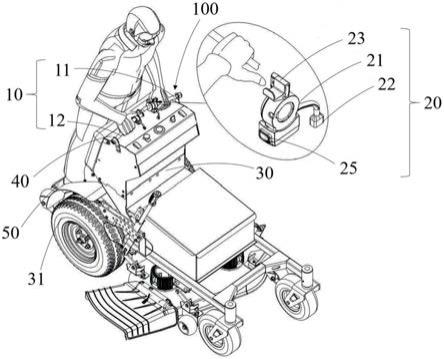
24.图1是本实用新型第一实施例的转向操控机构应用于割草机的结构图。
25.图2是本实用新型中转向操控机构的剖面结构图。
26.图3是本实用新型中转向操控机构的分解结构示意图。
27.图4是本实用新型中第一握持部的结构图。
28.图5是图4中拇指卡槽的旋转角度与检测件输出的电压值对应的关系图。
29.图6是图5中检测件输出的电压值与控制器转速输出值的对应关系图。
30.图7是本实用新型中控制器与其他器件的电路结构图。
31.图8是本实用新型第二实施例中的转向操控机构的分解结构示意图。
32.图9是本实用新型第三实施例中的转向操控机构的结构示意图。
具体实施方式
33.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
34.本实用新型揭示了一种应用于园林工具上的转向操控机构100,该园林工具可以是割草机,也可以是其他种类的园林工具,此处不做详细描述,也不做任何限制。为了描述清楚,以下说明书部分将以转向操控机构100应用于割草机为例,对转向操控机构100的具体结构进行详细说明。
35.如图1所示,所述割草机包括主体部30、操作面板40以及踏板50,所述主体部30包括行走轮31和电机(未图示),所述电机用于驱动所述行走轮31行走。具体地,所述割草机中设有与电机相连的差速器,用于实现左右两侧的行走轮31以不同转速滚动。当然,所述行走轮31也可以是其他结构,包括但不限于轮毂电机等形式,在此不作限制。
36.所述操作面板40和所述踏板50设置在所述割草机的主体部30的后端,所述转向操控机构100设置在所述操作面板40上并与所述割草机的控制器(未图示)电气连接,便于操作者站立在所述踏板50上进行操作。
37.如图2和图3所示,所述转向操控机构100包括供使用者双手握持的支撑部10,所述支撑部10包括第一握持部11和第二握持部12,所述第一握持部11和第二握持部12分别设置在所述操作面板40的左右两侧,且所述第一握持部11和第二握持部12优选为镜像对称。具体地,所述支撑部10通过锁固机构13固定安装在所述操作面板40上,支撑部10两端与锁固机构13连接。本实施例的第一握持部11和第二握持部12水平倾斜设置,便于操作者分别用左手和右手横着握住所述第一握持部11和第二握持部12,以保持操作者在所述割草机晃动中的平衡,如此设置更符合人体工程学。
38.在本实用新型的实施例中,所述第一握持部11和第二握持部12可以固定连接,即所述第一握持部11和第二握持部12可以为一个一体构件,所述第一握持部11和第二握持部12在连接处所形成的夹角为钝角,使得所述第一握持部11和第二握持部12整体为倒v字型,便于双手进行握持。具体地,所述第一握持部11和第二握持部12可以为支撑杆等形式,可根据实际需要进行选择,在此不做限制。
39.具体地,所述第一握持部11和第二握持部12用于手持部分的长度设置为n1,所述第一握持部11和第二握持部12在水平方向上的长度设置为n2,其中n1大于等于140mm,n2位于225~450mm之间。根据经验可知,一般人的除拇指外的手指宽度为l1,虎口至拇指指尖距离l2,双手笔直前伸的手指外边缘距离,即成年人肩宽为l3,其中l1位于80~100mm之间,l2位于60~75mm之间,l3位于450mm左右。所述第一握持部11和第二握持部12用于手持部分的长度即为手指抓握范围,即n1≥l1+l2,n1≥140mm。在所述第一握持部11和第二握持部12在水平方向上的长度大于人体肩宽时,将使得操作不便,此时应使得0.5l3≤n2≤l3,即n2位于225~450mm之间。
40.所述支撑部10上还设有固定在支撑部10上的操作部20,所述操作部20被配置为在操作者握持所述支撑部10时能够被操作,以调节电机的转速并实现转向。
41.具体地,所述操作部20设有一对,该一对操作部20分别设置在所述第一握持部11和第二握持部12上且呈镜像对称设置,所述一对操作部20用于根据操作者手部操作产生的位移发出操作信号。所述一对操作部20用于操控所述割草机的行驶,操作者可在双手握持所述第一握持部11和第二握持部12时,通过手指操作所述一对操作部20,无需通过手臂前后运动进行操作,避免了在操作过程中导致的重心不稳等问题。
42.进一步地,所述一对操作部20分别具有一个拇指卡槽23,操作者可以将手指放入所述拇指卡槽23并拨动所述拇指卡槽23以进行顺时针方向操作或逆时针方向操作。所述手指可以是拇指,通过拇指的前后摆动以使下文所说的检测件21输出电压信号。
43.如图4所示,具体地,所述拇指卡槽23至所述支撑部10的手指抓握中心的距离(即拇指卡槽23的高度)为n3,本实用新型的实施例将拇指卡槽23的高度n3设置为50~70mm。由
于拇指的长度有限,在通过拇指控制所述拇指卡槽23可围绕所述一对操作部20旋转的角度α也有限,在本实用新型中旋转角度α设置为
‑
30
°
~30
°
。
44.所述一对操作部20还均设有弹性组件24,所述弹性组件24一端与所述拇指卡槽23相连,另一端设置在支撑部10上。所述弹性组件24用于将所述拇指卡槽23复位至初始位置,便于控制器精准的实现停车制动。在本实用新型中,所述弹性组件24可为回位弹簧或扭簧等结构,具体设置形式可根据实际需要进行选择,在此不作限制。
45.进一步地,所述一对操作部分别具有检测件21以及与所述检测件21电气连接的接插件22,所述检测件21用于根据操作者手部操作产生的位移发出操作信号,所述控制器通过接插件22与操作部20建立电气连接,从而可根据检测件21发出的操作信号向割草机发出控制指令。本实施例中,所述检测件21为电位计式传感器,可根据手部操作的幅度产生不同的位移并输出相应的电压值,以输出电压信号。所述位移包括线位移和/或角位移,在本实用新型中可通过所述拇指卡槽23来产生角位移,即所述一对操作部20可将自身的操作状态通过所述检测件21产生角位移并转化为相应的电压值,向控制器发出操作信号,以便于控制器根据相应的电压值发出控制指令,以此控制所述割草机的前进/后退、转弯或零转向,并根据具体角位移的幅度控制所述割草机的速度。当然,在其他实施例中,所述检测件21也可以为其他用于检测手部操作的器件,包括但不限于位移传感器、光传感器或压力传感器等形式,在此不做限制。
46.具体地,所述操作者的手部操作包括左右手同向操作所述一对操作部20和左右手以相反方向操作所述一对操作部20。所述同向操作包括自初始位置移向前端位置的顺时针方向操作以及自初始位置移向后端位置的逆时针方向操作;所述相反方向操作包括左手逆时针方向操作的同时右手顺时针方向操作,以及左手顺时针方向操作的同时右手逆时针方向操作。
47.更进一步地,操作部20包括固定部211和转动部212,其中,固定部211固定在支撑部10上,转动部212可相对于固定部211转动,检测件21用于检测转动部212相对于固定部211转动的角度。具体地,转动部212可相对于固定部211双向转动,所述拇指卡槽23设置在转动部212上并带动转动部212同步转动,便于通过手指进行操作。固定部211上设有第一位置、第二位置和第三位置,其中,第二位置为转动部212的初始位置且第二位置位于第一位置和第三位置之间,第三位置为转动部212转动的最大位置,第一位置为转动部212反向转动的最大位置。当转动部212位于第一位置时,检测件21输出的电压值最小;当转动部212位于第三位置时,检测件21输出的电压值最大。
48.如图5和图6所示,在本实用新型的一较佳的实施例中,可将所述检测件21输出的电压值范围设为0~5v,即当转动部212位于第一位置时,检测件21输出的电压值为0v,转动部212位于第三位置时,检测件21输出的电压值为5v。相应地,转动部212的旋转角度α设置为
‑
20
°
~20
°
,所述检测件21输出的电压值范围与旋转角度α呈正线性相关,即,当所述一对操作部20的旋转角度α分别为
‑
20
°
、0
°
和20
°
时,分别对应后端位置、初始位置和前端位置,同时检测件21对应输出的电压值分别为0v、2.5v和5v。换言之,所述一对操作部20进行顺时针旋转可以输出高电压信号,进行逆时针旋转可以输出低电压信号。
49.在本实用新型的具体实施例中,所述一对操作部20均顺时针旋转输出高电压信号时,所述控制器通过向所述割草机发送控制指令,从而分别驱动左轮胎和右轮胎前进;所述
一对操作部20均逆时针旋转输出低电压信号时,所述控制器通过向所述割草机发送控制指令,从而分别驱动左轮胎和右轮胎后退。
50.进一步地,当左右手同向操作相同幅度时,所述控制指令为前进/后退指令;当左右手同向操作不同幅度时,所述控制指令为转弯指令;当左右手以相反方向操作相同幅度时,所述控制指令为零转向指令。
51.相应地,所述割草机的控制器转速输出,即左右轮胎前进或后退的速度取决于检测件21输出的具体电压值。当所述检测件21输出的电压值范围在(2.5,5]时,随着电压值的增大,控制器转速输出增大,相应的控制器转速输出范围为0~100%;当所述检测件21输出的电压值范围在[0,2.5)时,随着电压值的减小,控制器转速输出反向增大,相应的控制器转速输出范围为0~
‑
100%。也就是说,所述电压值范围(2.5,5]为前进区间,所述电压值范围[0,2.5)为后退区间,当所述检测件21输出的电压值在2.5v左右时,一对操作部20处于初始位置,控制器转速输出为0,处于中间区间。所述中间区间的具体范围可以根据需要进行设置,当然,所述中间区间的范围不可设置过小,以便于操作者进行操控。
[0052]
如图4和图7所示,所述一对操作部20还设有安全开关25,所述安全开关25可以用于控制所述园林工具的电磁刹车的通断,并分别与所述一对操作部20建立物理和电气连接,以使得操作者需要先按动所述一对安全开关25以后才能操作所述一对操作部20,从而操控所述园林工具完成的相应动作。所述一对操作部20在所述安全开关25触发前处于锁定状态,对任何操作均无响应,只有在触发安全开关25后,即操作者在确保操作安全的状态下启动安全开关25,方可对所述一对操作部20进行操作使用,其目的是为了实现“双动作”操作,能够有效避免误操作。
[0053]
如图8所示,在本实用新型的第二实施例中,本实用新型还提供了一种转向操控机构200,包括支撑部10,所述支撑部10包括一体设置的第一握持部11和第二握持部12。其中,所述第一握持部11和第二握持部12为水平倾斜且镜像对称设置,并且所述第一握持部11和第二握持部12在连接处的夹角为钝角。所述第一握持部11和第二握持部12上还均设有一对操作部20。其中,所述第一握持部11和第二握持部12的结构与上述第一实施例转向操控机构100的结构相同,所述一对操作部20是调速转把。所述调速转把20设置在所述支撑部10的两端,包括如图3所示第一实施例中的检测件21、弹性组件24和安全开关25,由于所述检测件21、弹性组件24和安全开关25的结构与第一实施例中的结构相同,在此不再赘述。所述调速转把分别设置在所述第一握持部11和第二握持部12上,且两个所述调速转把20镜像对称。在本实施例中,所述调速转把20的旋转角度优选设置为
‑
20
°
~20
°
,操作者通过顺时针或逆时针转动调速转把即可实现控制对应轮胎的前进或后退。
[0054]
如图9所示,在本实用新型的第三实施例中,本实用新型还提供了一种转向操控机构300,包括支撑部10,所述支撑部10包括分体设置的第一握持部11和第二握持部12。其中,所述第一握持部11和第二握持部12为竖直方向倾斜且优选为镜像对称设置,并且所述第一握持部11和第二握持部12呈n型,便于操作者分别用左手和右手竖着握住所述第一握持部11和第二握持部12,以保持操作者在所述割草机晃动中的平衡。此时所述第一握持部11和第二握持部12用于手持部分的长度仍设置为n1,所述第一握持部11和第二握持部12在水平方向上的长度仍设置为n2,其中n1大于等于140mm,n2位于225~450mm之间。
[0055]
本实用新型还揭示了一种具有转向操控机构100的割草机的控制方法,主要包括
以下步骤:
[0056]
s1、当左右手均顺时针以相同幅度操作转向操控机构时,所述割草机处于前进状态;
[0057]
当左右手均逆时针以相同幅度操作转向操控机构时,所述割草机处于后退状态;
[0058]
s2、当左手顺时针或逆时针操作转向操控机构,右手任意方向进行操作且操作幅度小于左手操作幅度时,此时转弯中心处于右侧,所述割草机处于前右转弯或后右转弯状态;
[0059]
当右手顺时针或逆时针操作转向操控机构,左手任意方向进行操作且操作幅度小于右手操作幅度时,此时转弯中心处于左侧,所述割草机处于前左转弯或后左转弯状态;
[0060]
s3、当左手顺时针且右手逆时针以相同幅度操作转向操控机构时,所述割草机处于向右零转向转弯状态;
[0061]
当右手顺时针且左手逆时针以相同幅度操作转向操控机构时,所述割草机处于向左零转向转弯状态。
[0062]
综上所述,本实用新型结构简单且仅需手部进行小幅度动作即可操控园林工具的前进/后退、转弯和零转向,有效地保持人体重心稳定与平衡,使得操控更加方便安全。
[0063]
以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1