可控鱼智能钓鱼器的制作方法
1.本发明涉及钓鱼休闲领域,具体地说,涉及一种可控鱼智能钓鱼器。
背景技术:
2.随着人们生活水平的提高和工作压力的增大,很多人休息日想到野外休闲放松心情钓钓鱼,但钓鱼经验和技术有限,或事务缠身不能持续盯鱼漂,或多竿钓鱼盯不过来,特为此发明本发明,为人们提高休闲生活质量。
技术实现要素:
3.本发明的目的在于解决上述问题,提供可控鱼智能钓鱼器,通过智能控制器控制钓鱼器代替人盯漂和控鱼,钓鱼人享受溜鱼和收鱼的喜悦。
4.为实现上述目的,本发明采取以下技术方案。
5.可控鱼智能钓鱼器,包括钓鱼竿、钓鱼线、鱼钩、铅坠,所述钓鱼竿的握把前部安装有智能钓鱼轮组,所述智能钓鱼轮组上安装设置有鱼线轮、收线电机、同步齿形带轮组、测量滚轮、出线电机、传感装置、导线轮、控制盒、显示屏、手动摇把、齿轮传动组、离合器装置,所述鱼线轮前部安装有收线电机,所述收线电机输出轴通过同步齿形带轮组和齿轮组将旋转扭矩传递给所述鱼线轮进行钓鱼线的收线,所述同步齿形带轮组和齿轮组设置于所述鱼线轮的侧面,所述鱼线轮的侧面还安装有手动摇把和齿轮传动组以及离合器装置,所述鱼线轮前部设置有测量滚轮,所述测量滚轮测量所述钓鱼线被收线和被出线的长度,所述测量滚轮侧面安装连接有出线电机,所述出线电机驱动所述测量滚轮旋转拉动钓鱼线进行钓鱼线的出线,所述测量滚轮前部设置有钓鱼线受力传感装置,所述传感装置前部设置有导线轮,所述导线轮和所述测量滚轮和所述传感装置构成对钓鱼线的振动信号和钓鱼线的拉力信号的感应测量机构,所述传感装置侧面设置有控制盒,所述控制盒接收并运算处理所述传感装置和所述测量滚轮发送的信号,所述控制盒发出信号控制所述出线电机进行钓鱼线的出线,所述控制盒发出信号控制所述收线电机对钓鱼线进行高速或低速收线,所述控制盒侧面设置有显示屏,所述控制盒通过所述显示屏进行钓鱼人与可控鱼智能钓鱼器间的信息交流,并有声光报警装置,所述控制盒可通过无线信号与钓鱼人的移动通信设备连接并进行钓鱼人与可控鱼智能钓鱼器间的信息交流。
6.进一步,所述传感装置和所述测量滚轮和所述导线轮构成对钓鱼线的振动信号和钓鱼线的拉力信号的感应测量机构,所述传感装置采样收集钓鱼线的振动信号和钓鱼线的拉力信号,所述传感装置将收集的信号传送给所述控制盒。
7.进一步,所述测量滚轮测量钓鱼线被收线和被出线的长度,所述测量滚轮将测量的信号传送给所述控制盒。
8.进一步,所述测量滚轮旋转拉动钓鱼线进行钓鱼线的出线,所述测量滚轮侧面安装连接有出线电机,所述出线电机驱动所述测量滚轮旋转。
9.进一步,所述控制盒接收所述测量滚轮测量的钓鱼线被收线和被出线的长度信
号,所述控制盒经运算控制收线电机和出线电机对钓鱼线进行收线和出线,所述控制盒控制鱼钩在水中距离水面的深度。
10.进一步,所述控制盒接收并运算处理所述传感装置和所述测量滚轮发送的信号,所述控制盒判断鱼钩和铅坠的触底信号对水深进行测量。
11.进一步,所述控制盒不断接收所述传感装置发送的信号并运算判断鱼钩上的鱼饵是否存在,鱼饵不存在时所述控制盒进行声光报警,通知钓鱼人。
12.进一步,所述控制盒发出信号控制所述出线电机进行钓鱼线的出线,所述控制盒发出信号控制所述收线电机对钓鱼线进行低速收线,实现钓鱼过程中的逗鱼动作反复循环。
13.进一步,所述控制盒发出信号控制所述收线电机对钓鱼线进行高速收线,实现鱼钩刺鱼动作。
14.进一步,所述控制盒完成刺鱼程序动作后,所述控制盒不断接收所述传感装置发送的信号并运算判断刺鱼动作是否成功,在刺鱼动作不成功后,所述控制盒进行鱼饵是否存在的判断程序,鱼饵存在时所述控制盒恢复钓鱼人设定的鱼钩的水深进行钓鱼程序。
15.进一步,所述控制盒接收并运算处理所述传感装置和所述测量滚轮发送的信号,在刺鱼动作成功后,鱼带动鱼钩用力拉动钓鱼线时,所述控制盒控制所述收线电机停止收钓鱼线,所述收线电机保持磁阻尼缓慢被动放出钓鱼线,在鱼回游时所述控制盒发出信号控制所述收线电机对钓鱼线进行收线,保持钓鱼线存在拉力,实现控鱼动作。
16.进一步,所述控制盒通过所述显示屏进行钓鱼人与可控鱼智能钓鱼器的信息交流,所述控制盒可通过无线信号与钓鱼人的移动通信设备连接并进行钓鱼人与可控鱼智能钓鱼器的信息交流,所述控制盒在鱼咬钩后发出声光报警通知钓鱼人。
17.进一步,所述鱼线轮的侧面还安装有所述手动摇把和齿轮传动组以及离合器装置,实现可控鱼智能钓鱼器随时与钓鱼人的切换。
18.本发明可控鱼智能钓鱼器的积极效果是:(1)本发明提高人们休闲时的乐趣和质量;(2)本发明钓鱼时可以与家人在野外活动互动,不用持续守竿;(3)本发明可以多竿多点同时垂钓;
19.为了更清楚的说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
附图说明
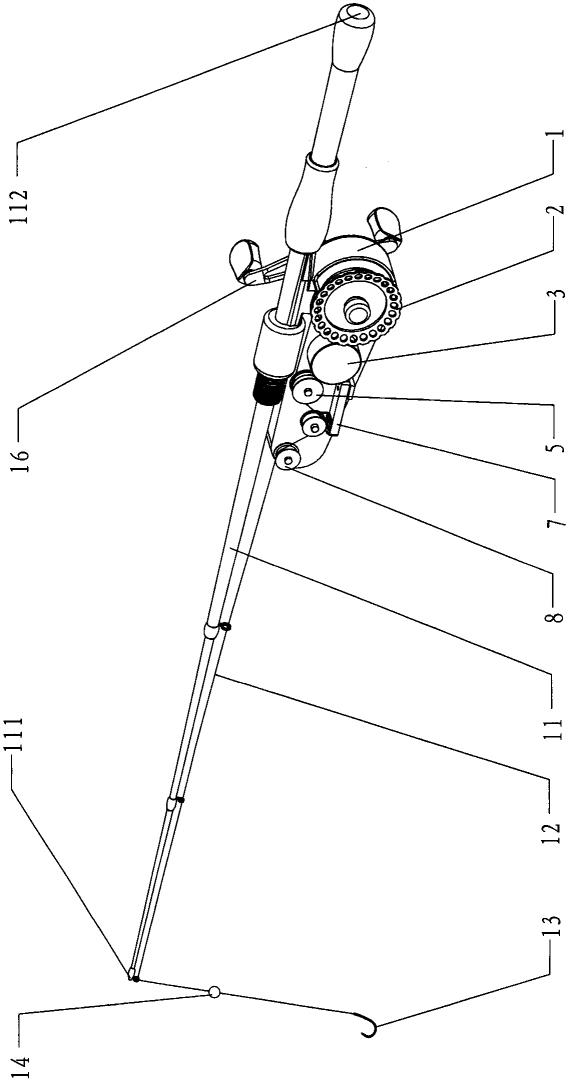
图1是本发明可控鱼智能钓鱼器的左侧三维示意图;图2是本发明可控鱼智能钓鱼器的右侧三维示意图;图3是本发明可控鱼智能钓鱼器的左侧局部三维示意图;图4是本发明可控鱼智能钓鱼器的右侧移除盖板和手动摇把的局部三维示意图。
20.图中的标号分别为:1.智能钓鱼轮组;2.鱼线轮;3.收线电机;4.同步齿形带轮组;41.大同步齿形带
轮;42.小同步齿形带轮;5.测量滚轮;6.出线电机;7.传感装置;8.导线轮;9.控制盒;10.显示屏;11.钓鱼竿;111.钓鱼竿前端;112.钓鱼竿后端;12.钓鱼线;13.鱼钩;14.铅坠;15.盖板;16.手动摇把。
具体实施方式
21.为了便于理解本发明,下面将参照相关附图对可控鱼智能钓鱼器进行更全面的描述,附图中给出了可控鱼智能钓鱼器的首选实施例,但是,可控鱼智能钓鱼器可以以许多不同的形式来实现,并不限于本文所描述的实施例,相反的,提供这些实施例的目的是使对可控鱼智能钓鱼器的公开内容更加透彻全面。在本发明的描述中,需要理解的是,术语“上”,“下”,“左”,“右”,“前”,“后”,“侧面”,“出线”,“收线”,“水面”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”,“设置”,“连接”,“相连”,“传送”,“接收”等应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接连接,也可以通过中间媒介间接连接,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
22.以下结合附图详细介绍本发明可控鱼智能钓鱼器的优选具体实施方式。
23.参见图1-4,本发明可控鱼智能钓鱼器,包括钓鱼竿11、钓鱼线12、鱼钩13、铅坠14,所述钓鱼竿11的握把前部安装有智能钓鱼轮组1,所述智能钓鱼轮组1上安装设置有鱼线轮2、收线电机3、同步齿形带轮组4、测量滚轮5、出线电机6、传感装置7、导线轮8、控制盒9、显示屏10、手动摇把16、齿轮传动组、离合器装置,所述鱼线轮2前部安装有收线电机3,所述收线电机3输出轴通过同步齿形带轮组4和齿轮组将旋转扭矩传递给所述鱼线轮2进行钓鱼线12的收线,所述同步齿形带轮组4和齿轮组设置于所述鱼线轮2的侧面,所述鱼线轮2的侧面还安装有手动摇把16和齿轮传动组以及离合器装置,所述鱼线轮2前部设置有测量滚轮5,所述测量滚轮5测量钓鱼线12被收线和被出线的长度,所述测量滚轮5侧面安装连接有出线电机6,所述出线电机6驱动所述测量滚轮5旋转拉动钓鱼线12进行钓鱼线12的出线,所述测量滚轮5前部设置有钓鱼线12受力传感装置7,所述传感装置7 前部设置有导线轮8,所述导线轮8和所述测量滚轮5和所述传感装置7构成对钓鱼线12的振动信号和钓鱼线12的拉力信号的感应测量机构,所述传感装置7侧面设置有控制盒9,所述控制盒9接收并运算处理所述传感装置7和所述测量滚轮5发送的信号,所述控制盒9发出信号控制所述出线电机6进行钓鱼线12的出线,所述控制盒9发出信号控制所述收线电机3对钓鱼线12 进行高速或低速收线,所述控制盒9侧面设置有显示屏10,所述控制盒9通过所述显示屏10进行钓鱼人与可控鱼智能钓鱼器间的信息交流,并有声光报警装置,所述控制盒9可通过无线信号与钓鱼人的移动通信设备连接并进行钓鱼人与可控鱼智能钓鱼器间的信息交流。
24.参见图1-4,所述传感装置7位于所述测量滚轮5和所述导线轮8的中间下部,所述钓鱼线12从所述鱼线轮2上拉出,在所述测量滚轮5上缠绕通过后绕过所述传感装置7上的滚轮再绕过所述导线轮8穿向钓鱼竿前端111,所述测量滚轮5和所述导线轮8使测量环境稳定并使钓鱼线12的合力对所述传感装置7的拉力增加,构成感应测量机构,当钓鱼线12受力
振动和受拉力时,钓鱼线12向上牵拉所述传感装置7,这时所述传感装置7感应到向上的牵拉力,达到感应测量的目的,所述传感装置7采样收集钓鱼线12的振动信号和钓鱼线12的拉力信号,并将收集的信号传送给所述控制盒9进行运算处理。
25.参见图1-4,所述测量滚轮5测量所述钓鱼线12被收线和被出线的长度,钓鱼线12在所述测量滚轮5上缠绕后再向前绕过所述传感装置7,当钓鱼线12被收线和被出线时,缠绕在所述测量滚轮5上的钓鱼线12的摩擦力使所述测量滚轮5旋转,嵌入在所述测量滚轮5内的磁性元件跟着旋转,所述控制盒9通过信号采集探头采集所述测量滚轮5的旋转方向及旋转圈数,并进行运算得到钓鱼线12的收线和出线长度。
26.参见图1-4,所述测量滚轮5旋转拉动缠绕在所述测量滚轮5上的钓鱼线12进行钓鱼线12的出线,所述测量滚轮5侧面安装连接有所述出线电机6,所述出线电机6驱动所述测量滚轮5旋转。
27.参见图1-4,钓鱼人开始钓鱼时,手动放出钓鱼线12,当鱼钩13接触水面时,钓鱼人将所述测量滚轮5测量的长度信号置零并将可控鱼智能钓鱼器切换到自动钓鱼状态,所述控制盒9接收所述测量滚轮5测量的钓鱼线 12被收线和被出线的长度信号,所述控制盒9经运算并控制所述收线电机3 和所述出线电机6对钓鱼线12进行收线和出线,实现控制鱼钩在水中距离水面的深度距离,达到定深垂钓的目的。
28.参见图1-4,当鱼钩13和铅坠14接触到水底时,钓鱼线12上的拉力小于所述控制盒9程序设置的拉力值下线,所述控制盒9接收并运算处理所述传感装置7和所述测量滚轮5发送的信号,所述控制盒9运算判断鱼钩 13和铅坠14的触底信号对水深进行测量。
29.参见图1-4,所述控制盒9不断接收所述传感装置7发送的信号并运算比较钓鱼线12上的拉力值,判断鱼钩13上的鱼饵是否存在,鱼饵不存在时所述控制盒9进行声光报警,通知钓鱼人检查鱼饵并更换。
30.参见图1-4,所述控制盒9发出信号控制所述出线电机6进行钓鱼线12的出线,所述控制盒9发出信号控制所述收线电机3对钓鱼线12进行低速收线,反复循环出线和收线指令实现钓鱼过程中的逗鱼动作。
31.参见图1-4,所述控制盒9发出信号控制所述收线电机3对钓鱼线 12进行高速收线,实现鱼钩13的刺鱼动作。
32.参见图1-4,所述控制盒9完成刺鱼程序动作后,所述控制盒9不断接收所述传感装置7发送的信号并运算判断刺鱼动作是否成功,在刺鱼动作不成功后,所述控制盒9进行鱼饵是否存在的判断程序,鱼饵存在时所述控制盒9恢复钓鱼人设定的鱼钩13的水深进行钓鱼程序。
33.参见图1-4,所述控制盒9接收并运算处理所述传感装置7和所述测量滚轮5发送的信号,在刺鱼动作成功后,鱼带动鱼钩13用力拉动钓鱼线12 时,所述控制盒9控制所述收线电机3停止收钓鱼线12,所述收线电机3保持磁阻尼缓慢被动放出钓鱼线12,在鱼回游时所述控制盒9发出信号控制所述收线电机6对钓鱼线12进行收线,保持钓鱼线12存在拉力,实现控鱼动作。
34.参见图1-4,所述控制盒9通过显示屏10进行钓鱼人与可控鱼智能钓鱼器的信息交流,所述控制盒9可通过无线信号与钓鱼人的移动通信设备连接并进行钓鱼人与可控鱼智能钓鱼器的信息交流,控制盒在鱼咬钩后发出声光报警通知钓鱼人。
35.参见图1-4,所述鱼线轮2的侧面还安装有所述手动摇把16和齿轮传动组以及离合器装置,钓鱼人按下离合器按钮,所述鱼线轮2与所述手动摇把16传动齿轮分离,同时行程开关接通,所述控制盒9开始控制可控鱼智能钓鱼器进行垂钓,如钓鱼人摇动所述手动摇把16则离合器装置使所述鱼线轮2与所述手动摇把16传动齿轮结合,同时行程开关断开,即切换为人工状态,但所述控制盒9任然测量运算鱼钩在水中的深度,实现可控鱼智能钓鱼器随时与钓鱼人的切换。
36.以上所述仅是本发明的优选实施方式,但本发明并不局限于上述的具体实施方式,上述具体实施方式仅仅是示意性的,而不是限制性的,对于本技术领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1