圆盘耙的运输和作业智能化切换控制系统及圆盘耙的制作方法
1.本技术涉及农业机械领域,尤其涉及一种圆盘耙的运输和作业智能化切换控制系统及圆盘耙。
背景技术:
2.大型农机具如圆盘耙等,为保障运输,往往会设计成为可折叠式的,在进入农田与停止耕作时,需要对机器进行姿态切换,当前主流的姿态切换方式可分为机械式与液压式,机械式一般需要手动进行姿态的调整,液压式一般通过手动控制油缸来实现姿态切换,这两种方法在姿态切换时均需要人的配合,智能化程度较低,需要设计一种更加智能的姿态切换方案。
技术实现要素:
3.为了提高圆盘耙的折叠和展开的智能化程度,实现圆盘耙的一键姿态切换,本技术公开了一种圆盘耙的运输和作业智能化切换控制系统及应用该控制系统的圆盘耙。
4.本技术由以下技术方案实现:
5.圆盘耙的运输和作业智能化切换控制系统,
6.该圆盘耙包括牵引架、中心架、耙架和中间镇压辊,所述牵引架铰接于所述中心架前侧,所述耙架铰接于所述中心架的左侧和右侧,所述中间镇压辊铰接于所述中心架后侧;
7.该控制系统包括控制器、牵引架角度传感器、耙架角度传感器、中间镇压辊角度传感器、牵引架油缸、耙架油缸和中间镇压辊油缸,所述牵引架角度传感器与控制器相连用于检测牵引架与中心架之间的夹角,所述耙架角度传感器与控制器相连用于检测耙架与中心架之间的夹角,所述中间镇压辊角度传感器与控制器相连用于检测中间镇压辊与中心架之间的夹角,所述牵引架油缸用于推动中心架相对牵引架转动,所述耙架油缸用于推动耙架相对中心架转动,所述中间镇压辊油缸用于推动中间镇压辊相对中心架转动,所述牵引架油缸、耙架油缸和中间镇压辊油缸上分别设有与所述控制器电连接的电磁阀。
8.如上所述的圆盘耙的运输和作业智能化切换控制系统,该圆盘耙包括行走轮,所述行走轮设于所述中间镇压辊上;该控制系统包括行走轮角度传感器和行走轮油缸,所述行走轮角度传感器与控制器相连用于检测中间镇压辊与行走轮之间的夹角,所述行走轮油缸用于推动行走轮相对中间镇压辊转动,所述行走轮油缸上设有与所述控制器电连接的电磁阀。
9.如上所述的圆盘耙的运输和作业智能化切换控制系统,该圆盘耙包括侧镇压辊,每个耙架后侧铰接有所述侧镇压辊;该控制系统包括侧镇压辊角度传感器和侧镇压辊油缸,所述侧镇压辊角度传感器与控制器相连并用于检测侧镇压辊与耙架之间的夹角,所述侧镇压辊油缸用于推动侧镇压辊相对耙架转动,所述侧镇压辊油缸上设有与所述控制器电连接的电磁阀。
10.如上所述的圆盘耙的运输和作业智能化切换控制系统,该圆盘耙包括限深轮,所
述限深轮铰接于所述耙架前侧,该控制系统包括限深轮角度传感器和限深轮油缸,所述限深轮角度传感器与控制器相连并用于检测耙架与限深轮之间的夹角,所述限深轮油缸用于带动所述限深轮相对所述耙架移动,所述限深轮油缸上设有与所述控制器电连接的电磁阀。
11.如上所述的圆盘耙的运输和作业智能化切换控制系统,所述控制器为ecu控制器。
12.如上所述的圆盘耙的运输和作业智能化切换控制系统,所述中心架上设有与所述耙架油缸相连通的仿形蓄能器,所述仿形蓄能器与控制器相连。
13.如上所述的圆盘耙的运输和作业智能化切换控制系统,所述耙架上设有配重机构。
14.如上所述的圆盘耙的运输和作业智能化切换控制系统,所述配重机构包括固定支架和配重块,所述固定支架设于所述耙架上,所述配重块与所述固定支架可拆卸连接。
15.本技术还公开了圆盘耙,包括如上所述的圆盘耙的运输和作业智能化切换控制系统。
16.与现有技术相比,本技术有如下优点:
17.本技术中,控制器与圆盘耙设备上安装的角度传感器和油缸相连,并通过油缸调整圆盘耙中对应部件的位置,操作时角度传感器记录对应部件的运动位置信息,并将对应部件的角度位置信息传输给控制器,控制器根据相关部件角度位置信息通过控制各个电磁阀来控制各个油缸,使得对应部件能够相互独立的转动到指定的位置,从而使圆盘耙能够自动反映自身的运动情况以及有效响应外界给与的状态调整的命令,具有自主完成对应调节的能力,从而实现了大型圆盘耙展开和折叠姿态切换的智能自动控制和智能化操作。
附图说明
18.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是实施例公开的圆盘耙的俯视图。
20.图2是实施例公开的圆盘耙处于工作状态的侧视图。
21.图3是实施例公开的圆盘耙处于运输状态的侧视图。
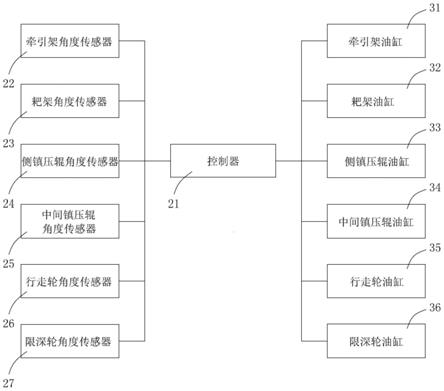
22.图4是实施例公开的圆盘耙的运输和作业智能化切换控制系统的原理框图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.实施例:本实施例公开了圆盘耙的运输和作业智能化切换控制系统,如图1至图3所示,该圆盘耙包括牵引架11、中心架12、耙架13、侧镇压辊14、中间镇压辊15和行走轮16,所述牵引架11铰接于所述中心架12前侧,所述耙架13铰接于所述中心架12的左侧和右侧,
每个耙架13后侧铰接有所述侧镇压辊14,所述中间镇压辊15铰接于所述中心架12后侧,所述行走轮16设于所述中间镇压辊15上;如图4所示,该控制系统包括控制器21、牵引架角度传感器22、耙架角度传感器23、侧镇压辊角度传感器24、中间镇压辊角度传感器25、行走轮角度传感器26、牵引架油缸31、耙架油缸32、侧镇压辊油缸33、中间镇压辊油缸34和行走轮油缸35,具体地,为了满足圆盘耙的使用需求,所述控制器21为ecu控制器。所述牵引架角度传感器22与控制器21相连并用于检测牵引架11与中心架12之间的夹角,所述耙架角度传感器23与控制器21相连并用于检测耙架13与中心架12之间的夹角,所述侧镇压辊角度传感器24与控制器21相连并用于检测侧镇压辊14与耙架13之间的夹角,所述中间镇压辊角度传感器25与控制器21相连并用于检测中间镇压辊15与中心架12之间的夹角,所述行走轮角度传感器26与控制器21相连并用于检测中间镇压辊15与行走轮16之间的夹角,所述牵引架油缸31用于推动中心架12相对牵引架11转动,所述耙架油缸32用于推动耙架13相对中心架12转动,所述侧镇压辊油缸33用于推动侧镇压辊14相对耙架13转动,所述中间镇压辊油缸34用于推动中间镇压辊15相对中心架12转动,所述行走轮油缸35用于推动行走轮16相对中间镇压辊15转动,所述牵引架油缸31、耙架油缸32、侧镇压辊油缸33、中间镇压辊油缸34和行走轮油缸35上分别设有与所述控制器21电连接的电磁阀。本实施例中,控制器与圆盘耙设备上安装的角度传感器和油缸相连,并通过油缸调整圆盘耙中对应部件的位置,操作时角度传感器记录对应部件的运动位置信息,并将对应部件的角度位置信息传输给控制器,控制器根据相关部件角度位置信息通过控制各个电磁阀来控制各个油缸,使得对应部件能够相互独立的转动到指定的位置,从而使圆盘耙能够自动反映自身的运动情况以及有效响应外界给与的状态调整的命令,具有自主完成对应调节的能力,从而实现了大型圆盘耙展开和折叠姿态切换的智能自动控制和智能化操作。
25.进一步地,为了方便智能调节耕作深度,该圆盘耙还包括限深轮17,所述限深轮17铰接于所述耙架13前侧,该控制系统包括限深轮角度传感器27和限深轮油缸36,所述限深轮角度传感器27与控制器21相连并用于检测耙架13与限深轮17之间的夹角,所述限深轮油缸36用于带动所述限深轮17相对所述耙架13移动,所述限深轮油缸36上设有与所述控制器21电连接的电磁阀。
26.进一步地,所述中心架12上设有与所述耙架油缸32相连通的仿形蓄能器4,所述仿形蓄能器4与控制器21相连。当圆盘耙设备遇到起伏地块或斜坡时,由于圆盘耙设备两翼宽度较大,两翼的耙架13如果锁定在平行中心架12的状态,会导致两翼耙架13受力不均匀,因此需要仿形功能。在运输状态切换到工作状态后,仿形功能就会随着耙架13的展开同步开启。当两翼耙架13完全展开后,耙架角度传感器23反馈信号至控制器21,控制器21开启仿形蓄能器4使仿形蓄能器4充液,充液完成后,耙架仿形功能开启。当遇到地块存在斜坡或起伏不平时,两侧耙架13会落在两侧高度不同的地面上,这时落在较高的土地一侧的耙架13就会被土地顶起一定的角度,在这个外力的作用下,耙架油缸32联通仿形蓄能器,使耙架油缸32的大腔出油,小腔进油,缸杆收回一定的距离,达到仿形的效果。当地块两侧高度一致后,恢复原来的水平。
27.进一步地,为了防止圆盘耙在一些存在起伏情况的地块出现设备悬空的危险,且同时防止如果地块土质太硬而导致耕作深度无法满足要求的不良现象发生,所述耙架13上设有配重机构18。具体地,所述配重机构18包括固定支架181和配重块182,为了方便用户调
节配重机构上的配重重量,所述固定支架181设于所述耙架13上,所述配重块182与所述固定支架181可拆卸连接。
28.本实施例中,当圆盘耙整机处于运输状态时:
①
牵引架油缸31处于其油缸中间某一位置(需保证运输高度),且其上电磁阀关闭;
②
耙架油缸32完全缩回,此时圆盘耙处于折叠状态,仿形蓄能器4全部关闭;
③
中间镇压辊油缸34完全缩回(保证运输高度);
④
限深轮油缸36完全缩回(保证运输宽度);
⑤
侧镇压辊油缸33完全缩回(保证运输宽度);
⑥
行走轮油缸35完全伸出,此时行走轮16着地,此时镇压辊离地地。
29.当圆盘耙整机处于工作状态时:
①
牵引架油缸31无杆腔控制阀打开,此时牵引架油缸31大小腔均无压力;
②
耙架油缸32完全伸出,圆盘耙展开,此时仿形蓄能器4均打开,耙架油缸32的大小腔均和仿形蓄能器4接通,耙架油缸32随地势高低而伸缩;
③
中间镇压辊油缸34伸出保持在设定耕深;
④
限深轮油缸36伸出保持在设定耕深;
⑤
侧镇压辊油缸33伸出保持在设定耕深;
⑥
行走轮油缸35完全缩回,此时镇压辊着地,行走轮16升起。
30.当圆盘耙需要从运输状态切换到工作状态时,圆盘耙由运输状态切换为工作状态过程为:
31.(1)整体拱起:拖拉机或其他外部设备给出准备工作信号到控制器21,控制器21发出工作信号控制牵引架油缸31的缸杆伸出以及控制中间镇压辊油缸34的缸杆伸出,待牵引架油缸31和中间镇压辊油缸34分别完全伸出使中心架12相对牵引架11展开至预定角度及使中间镇压辊15相对中心架12展开至预定角度,牵引架角度传感器22和中间镇压辊角度传感器25发信号至控制器21,使控制器21控制牵引架油缸31和中间镇压辊油缸34上各自电磁阀关闭,断开油路。此时圆盘耙整体拱起,使圆盘耙整机下端留出足够的空间,以便耙架13顺利展开。
32.(2)行走轮折叠收回:圆盘耙整体拱起后,控制器21发出工作信号至行走轮油缸35,行走轮油缸35的油缸缸杆缩回使行走轮16相对中间镇压辊15折叠收回,待行走轮16相对中间镇压辊15移动至预设角度值位置后,行走轮角度传感器26发信号至控制器21,使控制器21控制行走轮油缸35的电磁阀关闭,断开油路。
33.(3)耙架展开:行走轮折叠收回后,控制器21控制耙架油缸32的缸杆伸出,待两侧耙架13相对中心架12均完全展开后,耙架角度传感器23发信号至控制器21,使控制器21控制耙架油缸32上的电磁阀关闭,完成耙架13展开。
34.(4)中间镇压辊下降:耙架展开后,控制器21控制中间镇压辊油缸34的缸杆伸出,待中间镇压辊15相对中心架12的转动角度达到对应的角度使中间镇压辊15落地后中间镇压辊角度传感器25发信号至控制器21,使控制器21控制中间镇压辊油缸34的电磁阀关闭。
35.(5)侧镇压辊下降:中间镇压辊下降后,控制器21控制侧镇压辊油缸33的缸杆伸出,使侧镇压辊14相对耙架13展开,待侧镇压辊角度传感器24检测到展开的角度分别达到设定耕深对应的角度后发送信号至控制器21,使控制器21控制侧镇压辊油缸33上的电磁阀关闭。
36.(6)圆盘耙整体下降:侧镇压辊下降后,控制器21控制牵引架油缸31的缸杆缩回,牵引架11和中心架12之间的夹角角度达到设定角度后(该角度恰好使圆盘耙完全落地),此时圆盘耙处于工作状态。
37.如此完成一次姿态切换过程。
38.机器由工作状态切换为运输状态过程为:
39.(1)整体拱起:拖拉机或其他外部设备给出折叠信号到控制器21,控制器21控制牵引架油缸31的缸杆伸出以及控制中间镇压辊油缸34的缸杆伸出,待牵引架油缸31和中间镇压辊油缸34分别完全伸出使中心架12相对牵引架11展开至预定角度及使中间镇压辊15相对中心架12展开至预定角度,牵引架角度传感器22和中间镇压辊角度传感器25发信号至控制器21,使控制器21控制牵引架油缸31和中间镇压辊油缸34上各自电磁阀关闭,断开油路。此时圆盘耙整体拱起,使圆盘耙整机下端留出足够的空间,以便耙架13顺利折叠。
40.(2)耙架折叠:圆盘耙整体拱起后,控制器21控制耙架油缸32的缸杆缩回使两侧耙架13相对中心架12向上转动收折,待两侧耙架13相对中心架12均完全收折后,耙架角度传感器23发信号至控制器21,使控制器21控制耙架油缸32上的电磁阀关闭,完成耙架折叠。
41.(3)侧镇压辊折叠:耙架折叠后,控制器21控制侧镇压辊油缸33的缸杆缩回,使侧镇压辊14相对耙架13转动折叠,待侧镇压辊角度传感器24检测到折叠的角度分别达到设定的角度后发送信号至控制器21,使控制器21控制侧镇压辊油缸33上的电磁阀关闭。
42.(4)行走轮展开:耙架折叠后,控制器21控制行走轮油缸35的缸杆伸出,使行走轮16相对中间镇压辊15展开,待展开角度到达一定角度(该数值和运输高度有关)后,行走轮角度传感器26发信号至控制器21,使控制器21控制行走轮油缸35上的电磁阀关闭,断开油路。
43.(5)中间镇压辊上升:行走轮展开后,控制器21控制中间镇压辊油缸34的缸杆缩回,待中间镇压辊15相对中心架12的转动角度达到对应的角度使中间镇压辊15离地后中间镇压辊角度传感器25发信号至控制器21,使控制器21控制中间镇压辊油缸34的电磁阀关闭。
44.(6)圆盘耙整体下降:中间镇压辊上升后,控制器21控制牵引架油缸31的缸杆缩回,牵引架11和中心架12之间的夹角角度达到设定角度后(该角度恰好使圆盘耙完全落地),此时圆盘耙处于运输状态。
45.在整个过程中,控制器21通过控制电磁阀通断电控制对应油缸的伸缩,从而完成姿态切换的过程。
46.应当理解的是,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。此外,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和变形,这些改进和变形也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1