一种智能推拉式防蟑螂自动宠物喂食器的制作方法
1.本发明涉及宠物用具,尤其涉及一种智能推拉式防蟑螂自动宠物喂食器。
背景技术:
2.中国专利申请号202020140664.9公开了一种小型宠物自动喂食器,其包括储粮桶、机身主体、设置于所述机身主体内部的落粮系统,以及宠物喂食碗,或者还包括用于与所述机身主体连接的挂笼组件;所述储粮桶的漏粮口与所述落粮系统的入粮口连通,所述落粮系统的出粮口与所述宠物喂食碗直接连通或者通过所述挂笼组件与所述宠物喂食碗连通。
3.中国专利申请号201320357788.2公开了一种宠物喂食器,包括壳体,壳体上设有装食口,装食口通过管道连接出食口,所述的管道与出食口的连接处设有一平板,所述的平板分别连接有弹簧和拉压件,并且所述的壳体内设有电子发声器,所述的电子发声器连接壳体上的控制按钮。
4.中国专利申请号201821365439.4公开了一种宠物喂食器,包括喂食器壳体、喂食碗、保鲜罩、单片机信息处理模块和红外线感应器,喂食碗设置在喂食器壳体中,红外线感应器设置在喂食器壳体的前端,保鲜罩罩设在喂食碗上,保鲜罩可开合的设置在喂食器壳体上,红外线感应器、单片机信息处理模块相连接。
5.上述发明创造结构复杂,不易运输,易出现卡粮情况,且防潮及防虫性能较差。
技术实现要素:
6.本发明的目的在于,克服现有技术的上述缺陷,提供一种智能推拉式防蟑螂自动宠物喂食器。
7.为实现上述目的,本发明提供的技术方案如下:一种智能推拉式防蟑螂自动宠物喂食器,包括喂食器主体,喂食器主体包括底座,底座内设有驱动装置,底座上设有底座盖,底座盖上方设有粮桶,粮桶上方设有粮桶盖,底座盖内设有运粮槽,运粮槽内滑动设有运粮推块,运粮推块上方设有拨粮片,底座前侧对应运粮槽方向设有出粮口,运粮推块前端设有粮食防漏挡片,粮食防漏挡片前端设有防蟑螂密封条,驱动装置顶部与运粮推块相互连接,底座前侧对应出粮口下方设有喂食盆,包装时,粮桶放置在喂食盆上方,底座放置于粮桶内部。
8.进一步的,驱动装置包括齿轮箱,齿轮箱内设有马达,马达输出端设有涡轮,涡轮上连接设有若干减速齿轮,减速齿轮之间相互啮合连接,一减速齿轮延伸并暴露于齿轮箱外连接设有驱动齿轮,齿轮箱上方活动连接设有齿条,驱动齿轮与齿条啮合连接,齿条与运粮推块相互连接。
9.进一步的,齿条上横向间隔设有第一运粮推块位置控制点、第二运粮推块位置控制点及第三运粮推块位置控制点。
10.进一步的,底座前侧开设有操作窗,底座位于操作窗内侧设有主控板,主控板前侧
设有盖板,盖板前侧设有薄膜按键。
11.进一步的,出粮口外侧连接设有喂食盆,喂食盆内设有不锈钢盆。
12.进一步的,底座位于出粮口内侧还设有红外感应器。
13.进一步的,底座底部设有电池腔。
14.进一步的,主控板分别与电池腔、驱动装置及薄膜按键电性连接。
15.进一步的,底座底部设有脚垫。
16.本发明的有益之处是:结构简单,能够实现防虫及防潮功能,且采用推拉式出粮,出粮扭力小,不卡粮,在不使用时,还能进行叠加放置,节省空间体积小,减少运输成本。
附图说明
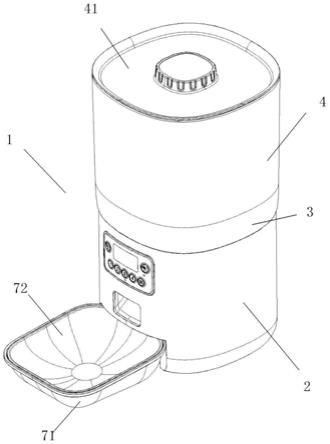
17.图1是本发明一种智能推拉式防蟑螂自动宠物喂食器的立体示意图;
18.图2是本发明一种智能推拉式防蟑螂自动宠物喂食器的第一实施例底座盖及粮桶爆炸示意图;
19.图3是本发明一种智能推拉式防蟑螂自动宠物喂食器的第一实施例底座爆炸示意图;
20.图4是本发明一种智能推拉式防蟑螂自动宠物喂食器底座顶视图;
21.图5是本发明一种智能推拉式防蟑螂自动宠物喂食器的第二实施例驱动装置与运粮推块爆炸示意图;
22.图6是本发明一种智能推拉式防蟑螂自动宠物喂食器的运输放置爆炸示意图。
具体实施方式
23.下面结合附图及较佳实施例就本发明的技术方案作进一步的说明。
24.如图1
‑
图4所示,本发明所述的一种智能推拉式防蟑螂自动宠物喂食器,包括喂食器主体1,喂食器主体1包括底座2,底座2内设有驱动装置,底座2上设有底座盖3,底座盖3上方设有粮桶4,粮桶4上方设有粮桶盖41,底座盖3内设有运粮槽32,运粮槽32内滑动设有运粮推块33,运粮推块33上方设有拨粮片3310,底座2前侧对应运粮槽32方向设有出粮口331,运粮推块33前端设有粮食防漏挡片34,粮食防漏挡片34前端设有防蟑螂密封条35,驱动装置顶部与运粮推块33相互连接。
25.进一步的,驱动装置包括齿轮箱51,齿轮箱51内设有马达52,马达52输出端设有涡轮53,涡轮53上连接设有第一减速齿轮54,第一减速齿轮54侧方啮合设有第二减速齿轮55,第二减速齿轮55侧方啮合设有第三减速齿轮56,第三减速齿轮56顶部延伸并暴露于齿轮箱51外连接设有驱动齿轮57,齿轮箱51上方活动连接设有齿条58,驱动齿轮57与齿条58啮合连接,齿条58与运粮推块33相互连接。
26.进一步的,齿条58上横向间隔设有第一运粮推块位置控制点581、第二运粮推块位置控制点582及第三运粮推块位置控制点583。
27.进一步的,底座2前侧开设有操作窗61,底座2位于操作窗61内侧设有主控板62,主控板62前侧设有盖板63,盖板63前侧设有薄膜按键64。
28.进一步的,出粮口331外侧连接设有喂食盆71,喂食盆71内设有不锈钢盆72。
29.进一步的,底座2位于出粮口331内侧还设有红外感应器81。
30.进一步的,底座2底部设有电池腔。
31.进一步的,主控板62分别与电池腔、驱动装置及薄膜按键64电性连接。
32.进一步的,底座2底部设有脚垫。
33.进一步的,粮食防漏挡片34两侧分别通过转轴36连接,转轴36外侧分别设有旋转弹簧盖37。
34.以上,本发明结构简单,将宠物粮放置于粮桶4内,由于设置的红外感应器81及第一运粮推块位置控制点581、第二运粮推块位置控制点582与第三运粮推块位置控制点583,第一运粮推块位置控制点581为起始位置,在不工作时红外感应器81控制马达52将齿条58运动在第一运粮推块位置控制点581位置,由于齿条58与运粮推块33连接,此时运粮推块33和防蟑螂密封条35抵贴,能够效防止蟑螂及潮气通过出粮口331进入到粮桶4内,底座盖3上由于设有运粮槽32,运粮推块33在运粮槽32内往复运动出粮,第二运粮推块位置控制点582与第三运粮推块位置控制点583是出粮运动控制点,出粮时,红外感应器81控制马达52转动,齿条58运动到第三运粮推块位置控制点583时,粮桶4内的粮食落入运粮槽32内,马达52再推动齿条58运动到第二运粮推块位置控制点582,此时粮食被运粮推块33推动到出粮口331,出粮口331采用倾斜设计,通过出粮口331,粮食会漏到喂食盆71内,到第二运粮推块位置控制点582之后,马达52将齿条58运动到第三运粮推块位置控制点583准备出第二份粮食,这个动作完成后就完成一份出粮,出第二份粮食时红外感应器81控制马达52将齿条58从第三运粮推块位置控制点583运动到第二运粮推块位置控制点582后,再运动回到第三运粮推块位置控制点583准备出第三份粮食,如此反复,每个控制点转换的时停顿时间设定为0.5秒,当出完用户设定的粮食份数之后,红外感应器81控制马达52将齿条58从第三运粮推块位置控制点583运动到第一运粮推块位置控制点581,运粮推块33和防蟑螂密封条35抵贴出粮口331,出粮工作全部完成,在不使用时,粮桶4放置到喂食盆71内,底座2放到粮桶4内,这种叠加设计大大缩小体积,方便运输及搬运。
35.更进一步的,如图5所示,在本发明的第二实施例中,运粮推块33底部沿滑动方向改设有啮合齿3311。驱动齿轮57通过固定螺丝与第三减速齿轮56连接,马达52转动,动力输出经过齿轮箱51减速后传递给驱动齿轮57,驱动齿轮57驱动带有啮合齿3311的运粮推块33沿啮合齿3311作往复运动进行推粮操作。
36.以上所述的仅是本发明的原理和较佳实施例。应当指出,对本领域的普通技术人员来说,在不脱离本发明原理的前提下,还能做出若干的变型和改进,也应视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1