一种基于PWM的植保无人机机载变量控制系统
一种基于pwm的植保无人机机载变量控制系统
技术领域
1.本发明属植保无人机变量施药控制技术领域,具体涉及一种基于pwm的植保无人机机载变量控制系统。
背景技术:
2.植保无人机的变量施药技术是人类重要的研究课题之一。随着植保无人机的普及和应用,对植保无人机的作业质量提出了更高的要求。在植保作业过程中,要实现精准施药这一目的,提高农药的有效利用率,就需要变量喷洒控制器来针对不同工况做出判断并计算施药量。
3.我国农业植保最主要的作业方式是人工喷药和地面植保喷雾机械喷药,人工植保投入人力多,劳动强度大,还常常发生施药人员中毒事件。地面植保喷雾机械比人工喷药的效率高,但经常会受到地形地貌、作物种植环境及作物后期长势等因素制约,无法很好的进入田间完成施药作业,与此相比,植保无人机作业具有一系列的优势,体积小、重量轻、作业效率高、防治效果好等。
4.但目前我国的航空技术发展仍在发展阶段,市面上大部分植保无人机的喷洒控制器仍然采用较为落后的开关式控制,无法对无人机喷洒流量进行变量控制,导致了农药的过量使用和对环境的污染。因此,研发一款植保无人机专用的机载变量控制系统可为精准施药提供重要技术保障。
技术实现要素:
5.本发明的目的在于提供一种利用pwm调速电路对植保无人机的施药量进行变量控制的技术。首先基于输入采集电路7和温度采集电路8对输入信号进行采集,再通过pwm电压放大电路4控制植保无人机水泵的输入电压,最终实现植保无人机的变量施药。
6.本发明的一种基于pwm的植保无人机机载变量控制系统由单片机核心电路1、电源电路2、iic接口电路3、pwm电压放大电路4、wifi接口电路5、sd卡接口电路6、输入采集电路7、温度采集电路8、通信接口电路9、植保无人机电池10和植保无人机水泵11组成,其中,单片机核心电路1通过stm32单片机控制芯片u18的11引脚与输入采集电路7连接,在+3.3v和gnd之间串联一个滑动变阻器,可采用手动控制滑动变阻器的方式改变stm32单片机控制芯片u18单元的11引脚端的电压值并采用输入采集电路7进行电压采集。单片机核心电路1通过stm32单片机控制芯片u18的15引脚与温度采集电路8连接,通过15引脚返回的data值测得温度信号。供电方式:单片机核心电路1中stm32单片机控制芯片u18的1、9、24、36、48引脚与电源电路2输出的正极+3.3v连接,单片机核心电路1中stm32单片机控制芯片u18的8、20、23、35、44、47引脚与电源电路2输出的负极连接。单片机核心电路1通过stm32单片机控制芯片u18的12、13引脚与wifi接口电路5的接口p10连接可实现远程通信功能。单片机核心电路1通过stm32单片机控制芯片u18的21、22引脚与iic接口电路3的1、2引脚连接可实现实时采集无人机的飞行速度和飞行高度信息。单片机核心电路1通过stm32单片机控制芯片u18的
30、31引脚与通信接口电路9的接口p12连接、单片机核心电路1通过stm32单片机控制芯片u18的34、37引脚与通信接口电路9的接口p11连接,为单片机核心电路1提供了两种程序烧录方式。
7.所述的单片机核心电路1的控制芯片选择stm32单片机u18,所述的单片机核心电路1包括stm32单片机控制芯片u18单元、复位按键s2、电容c22、电阻r16、晶振y2、电容c23、电容c24共同组成单片机最小工作电路;所述stm32单片机控制芯片u18单元的5,6,7引脚分别与晶振y2两端的osc_in、osc_out和复位按键s2的nrst引脚连接;所述复位按键s2与r5和c7连接作为单片机核心电路1的复位按钮。
8.所述的输入采集电路7的电位器输入接口p8单元的2引脚与单片机核心电路1的stm32单片机控制芯片u18中的11引脚连接用以将滑动变阻器的电阻值转化为电压信号并采集。
9.所述的电源电路2中的低压差电压调节器u10单元的in引脚通过二极管d6与植保无人机电池10+12v连接实现供电,u10的out引脚输出电压值为+5v;低压差电压调节器u11单元的in引脚与+5v连接实现供电,u11的out引脚输出电压值为+3.3v,植保无人机的电源电压+12v经过连续两次降压处理以得到两个不同的电压值+5v、+3.3v实现整个系统的供电。
10.所述的pwm电压放大电路4中的光电耦合器d10左侧两引脚分别与单片机核心电路1的stm32单片机控制芯片u18的16引脚和+5v连接,可以接收单片机核心电路116引脚输出的pwm信号,可根据单片机核心电路1中mcu_mosi引脚给出的信号实时调节输出电压。d10右侧两引脚分别与+12v和r13、r15并联,后通过q2与p9端口连接转化为0
‑
12v的电压信号并将p9输出口与植保无人机水泵11连接,最终完成植保无人机的变量喷洒控制。其中d10光耦隔离器元件的作用是隔离不同电压+5v、+12v两个电路以避免它们的相互干扰,电压的调节方式是通过q2元件的通断来执行的。
11.本发明的工作过程如下:
12.手动控制方式:首先使用p5或p6接口为stm32芯片烧录手动控制方式的软件程序,再接通电源,将机载变量控制系统分别接通植保无人机电源10和植保无人机水泵11,打开电源开关u13,系统开始工作。电源电路的2的低压差电压调节器u10接收植保无人机电源10的+12v信号并转化为+5v信号输出,+5v输出再通过低压差电压调节器u11转化为+3.3v信号输出,旋转与p8的2引脚连接的滑动变阻器旋钮,输入采集电路7开始工作并采集到电压信号,单片机核心电路1通过stm32单片机控制芯片u18将电压信号转化为数值信号作为输出pwm信号的占空比,pwm电压放大电路4的d10接收+5v的pwm电压信号并将其转化为+12v输出给q2,连接q2和+12v的p9接口接收+12v的pwm输出信号,接口p9连接植保无人机水泵11即可实现调速功能。
13.自动控制方式:首先使用p5或p6接口为stm32芯片烧录自动控制方式的软件程序,再接通电源,将机载变量控制系统分别接通植保无人机电源和水泵,打开电源开关u13系统开始工作。电源电路2的低压差电压调节器u10接收植保无人机电源10的+12v信号并转化为+5v信号输出,+5v输出再通过低压差电压调节器u11转化为+3.3v信号输出,iic接口电路3的u7采集飞行高度和飞行速度信息,温度采集电路8的u6采集环境温度信息,并根据单片机核心电路1嵌入已有的经验模型计算得到输出pwm信号的占空比,pwm电压放大电路4的d5接
收+5v的pwm电压信号并将其转化为+12v输出给q1,连接q1和+12v的p4接收+12v的pwm输出信号,p4连接植保无人机水泵11即可实现调速功能。
14.本发明的有益效果在于:通过手动和自动两种控制方式可实现植保无人机的变量调速功能,手动控制方式可根据需求手动调节施药量,自动控制方式可实时采集飞行高度和飞行速度信息,进而根据经验模型实时调节施药量,达到精准施药的目的,提高农药的有效利用率,减少对环境的污染。
附图说明
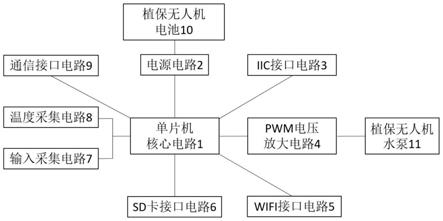
15.图1为机载变量控制系统的结构示意图;
16.图2为单片机核心电路1的电路图;
17.图3为单片机晶振及复位系统的电路图;
18.图4为滤波电路的电路图;
19.图5为输入采集电路7的电路图;
20.图6为电源电路2的电路图;
21.图7为一级降压(输出+5v)电路的电路图;
22.图8为二级降压(输出+3.3v)电路的电路图;
23.图9为pwm电压放大电路4的电路图;
24.图10为温度采集电路8的电路图;
25.图11为iic接口电路3的电路图;
26.图12为sd卡接口电路6的电路图;
27.图13为wifi接口电路5的电路图;
28.图14为串口通信接口电路9的swd接口电路图;
29.图15为串口通信接口电路9的串口电路图;
30.图16为机载变量控制系统的整体电路图面板;
31.其中:1.单片机核心电路2.电源电路3.iic接口电路4.pwm电压放大电路5.wifi接口电路6.sd卡接口电路7.输入采集电路8.温度采集电路9.通信接口电路10.植保无人机电池11.植保无人机水泵r9
‑
r16.电阻c23
‑
c24.电容y2.晶振s2.按键u9
‑
u18.电路元件d6
‑
d9.二极管d10.光电耦合器p7
‑
p12.接口。
具体实施方式
32.下面结合附图对本发明进行描述。
33.如图1所示,本发明由单片机核心电路1、电源电路2、iic接口电路3、pwm电压放大电路4、wifi接口电路5、sd卡接口电路6、输入采集电路7、温度采集电路8、通信接口电路9、植保无人机电池10和植保无人机水泵11组成,主体为输入采集电路7和pwm电压放大电路4,外围电路为电源电路2、wifi接口电路5、iic接口电路3、通信接口电路9、sd卡接口电路6。其中,单片机核心电路1通过stm32单片机控制芯片u18的11引脚与输入采集电路7连接,在+3.3v和gnd之间串联一个滑动变阻器,可采用手动控制滑动变阻器的方式改变stm32单片机控制芯片u18单元的11引脚端的电压值并采用输入采集电路7进行电压采集。单片机核心电路1通过stm32单片机控制芯片u18的15引脚与温度采集电路8连接,通过15引脚返回的data
值测得温度信号。供电方式:单片机核心电路1通过stm32单片机控制芯片u18的1、9、24、36、48引脚与电源电路2输出的正极+3.3v连接,单片机核心电路1通过stm32单片机控制芯片u18的8、20、23、35、44、47引脚与电源电路2输出的负极连接。单片机核心电路1通过stm32单片机控制芯片u18的12、13引脚与wifi接口电路5的接口p10连接可实现远程通信功能。单片机核心电路1通过stm32单片机控制芯片u18的21、22引脚与iic接口电路3的u16接口连接可实现实时采集无人机的飞行速度和飞行高度信息。单片机核心电路1通过stm32单片机控制芯片u18的30、31引脚与通信接口电路9的接口p12连接、单片机核心电路1通过stm32单片机控制芯片u18的34、37引脚与通信接口电路9的接口p11连接,为单片机核心电路1提供了两种程序烧录方式。
34.如图2至图4所示,所述的单片机核心电路1由stm32芯片、晶振电路、复位电路和滤波电路组成,其中stm32芯片的具体型号为stm32f103c8t6,其尺寸为32位,程序存储器容量是64kb,需要电压2v
‑
3.6v,工作温度为
‑
40℃
‑
85℃。晶振电路的晶振频率为8mhz,由有源晶振y2和两个20pf的电容c23和c24组成,复位电路由复位按键s2、电容c22和电阻r16组成。滤波电路由三个100uf的电容c19、c20和c21组成。
35.如图5所示,所述的输入采集电路7由电位器接口p8和外接电位器组成,p8中的2引脚与stm32单片机控制芯片u18中的11引脚连接。
36.如图6至图8所示,所述电源电路2经过两次降压处理以得到两个不同的电压值+5v、+3.3v,其中低压差电压调节器u10单元的in引脚通过d6与+12v连接,u10的out引脚与+5v连接;所述的低压差电压调节器u11单元的in引脚与+5v连接,u11的out引脚与+3.3v连接。
37.如图9所示,所述的pwm电压放大电路4由光耦隔离电路(左)和三极管导通电路(右)组成,光耦隔离器d10左侧两引脚分别与stm32单片机控制芯片u18的16引脚和+5v连接用以接收单片机核心电路1输出的电压信号,d10右侧两引脚分别与+12v和r13、r15并联,后通过q2与p9连接。其中d10元件的作用是隔离不同电压+5v、+12v两个电路以避免它们的相互干扰,q2元件的作用是通过其通断时间比来执行调压。
38.如图10所示,所述的温度采集电路8由外接传感器、u15元件和电阻r12组成,外接传感器的3引脚与u15的data引脚连接用以接收温度值。
39.如图11所示,所述的iic接口电路3由u16元件和四引脚接线实现,其中1、2引脚用来接收无人机飞行数据,3、4引脚用来接通电源。
40.如图12所示,所述的sd卡接口电路6由u4元件和两引脚接线实现,其中1、3引脚用来接通电源。
41.如图13所示,所述的wifi接口电路5由p10元件和四引脚接线实现,其中1、8引脚用来无线接收外部数据,2、7引脚用来接通电源。
42.如图14和图15所示,所述的通信接口电路9分为两个部分,下载接口由p11元件和四引脚接线实现,其中2、3引脚用来与上位机进行数据交互,1、4引脚用来接通电源;串口通信接口由p12元件和四引脚接线实现,其中2、3引脚用来与上位机进行串口通信,1、4引脚用来接通电源。
43.本发明的具体连接过程和工作过程如下:
44.本发明由单片机核心电路1、输入采集电路7、pwm电压放大电路4、温度采集电路8、
电源电路2、wifi接口电路5、iic接口电路3、通信接口电路9、sd卡接口电路6组成,该变量控制系统的核心为单片机核心电路1,主体为输入采集电路7,温度采集电路8和pwm电压放大电路4,外围电路为电源电路2、wifi接口电路5、iic接口电路3、通信接口电路9、sd卡接口电路6。其中,单片机核心电路1通过stm32单片机控制芯片u18的11引脚与输入采集电路7连接,在+3.3v和gnd之间串联一个滑动变阻器,可采用手动控制滑动变阻器的方式改变stm32单片机控制芯片u18单元的11引脚端的电压值并采用输入采集电路7进行电压采集。单片机核心电路1通过stm32单片机控制芯片u18的15引脚与温度采集电路8连接,通过15引脚返回的data值测得温度信号。供电方式:单片机核心电路1通过stm32单片机控制芯片u18的1、9、24、36、48引脚与电源电路2输出的正极+3.3v连接,单片机核心电路1通过stm32单片机控制芯片u18的8、20、23、35、44、47引脚与电源电路2输出的负极连接。单片机核心电路1通过stm32单片机控制芯片u18的12、13引脚与wifi接口电路5中的p10连接可实现远程通信功能。单片机核心电路1通过stm32单片机控制芯片u18的21、22引脚与iic接口电路3的u16连接可实现实时采集无人机的飞行速度和飞行高度信息。单片机核心电路1通过stm32单片机控制芯片u18的30、31引脚与通信接口电路9的p11接口连接、单片机核心电路1通过stm32单片机控制芯片u18的34、37引脚与通信接口电路9的p12接口连接,为单片机核心电路1提供了两种程序烧录方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1