割草机器人的制作方法
1.本发明属于机器人技术领域,具体涉及一种割草机器人。
背景技术:
2.现有的割草机的割刀高度调整不易,无法满足不同草场或同一草场不同位置的割草需求。且现有的割草机分为手持式割草机和遥控割草机,均不能完全脱离人员,无法将工人由割草工作中完全解放,而恶劣的草场环境以及割草时的噪音均会对工作人员的健康带来危害。
技术实现要素:
3.为解决上述问题,发明提供一种新型结构的割草机器人,使其不仅能够自动行走进行割草作业,而且还具有简单易操作的割刀位置调整结构,满足使用需求。
4.本发明的目的及解决其技术问题是采用以下技术方案来实现的。依据本发明提出的一种割草机器人,包括行走车架以及固定在该行走车架上的割刀升降机构和控制系统,其中所述割刀升降机构包括连接在两个交叉布置的连杆两端的固定架和升降架,两连杆上下两端分别滑动连接在固定架上沿水平方向延伸的固定导轨和升降架上沿水平方向延伸的活动导轨内,固定在固定导轨上的电推杆两端分别与两连杆上端连接并通过使两连杆上端沿固定导轨的互相远离和互相靠近实现升降架的上升和下降,固定在升降架上的汽油机驱动其输出轴上的割刀安装柄旋转,该割刀安装柄上安装有割刀片;所述控制系统包括自主导航控制器、rtk模块以及车辆控制器;所述自主导航控制器通过rtk模块获取定位信息,并通过车辆控制器实现对行走车架行走路线和行走速度的控制;该自主导航控制器还能够通过车辆控制器控制电推杆的推出行程,从而实现对割刀高度的调整。
5.本发明的目的及解决其技术问题还可采用以下技术措施进一步实现。
6.前述的割草机器人,其中所述的固定架上还设有沿竖直方向延伸的滑块导轨,所述升降架上设有相应的滑块,所述升降架通过滑块与滑块导轨的配合实现无偏移升降。
7.前述的割草机器人,其中所述的滑块导轨一侧还设有刻度尺,所述滑块上装有刻度指针。
8.前述的割草机器人,其中所述的连杆两端均通过销轴实现与导轨的滑动连接。
9.前述的割草机器人,其中所述的两个连杆中部的交叉位置通过销轴连接。
10.前述的割草机器人,其中所述的行走车架包括车架和固定在该车架两侧的行走机构,该行走机构为履带行走机构。
11.前述的割草机器人,其中所述的升降架底部还固定有用于防止草屑飞溅的挡尘板,该挡尘板上设有供汽油机输出轴穿过的通孔。
12.前述的割草机器人,其中所述的割刀安装柄两端各安装一个割刀片,且两个割刀片的刃口指向同一个转向。
13.前述的割草机器人,其中所述的控制系统还包括通过固定在行走车架上的遥控天
线接收遥控器信号的接收机,该接收机将接收的遥控信号输送至自主导航控制器,该自主导航控制器将车辆状态数据传送至主控室内的智能终端。
14.前述的割草机器人,其中所述的控制系统还包括固定在行走车架上、采集图像信息并将该图像信息传送至智能终端的摄像头。
15.本发明与现有技术相比具有明显的优点和有益效果。借由上述技术方案,本发明可达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有下列优点:
16.本发明割草机器人同时可通过无人驾驶功能实现自主作业,可以解放人力,统一作业效果,提高工作效率。且本发明割草机器人能够通过智能操作实现对割刀位置的精准调整,且割刀升降装置结构简单且稳定可靠。且本发明割草机器人还具有遥控功能,遥控是辅助功能,可用于转场和进仓库时的灵活操作,使得该机器人的使用更加方便。
附图说明
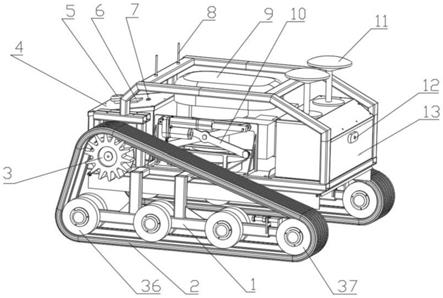
17.图1为本发明割草机器人总成;
18.图2为本发明割草机器人割刀升到最高位置时的割刀升降机构总成;
19.图3为本发明割草机器人割刀降到最低位置时的割刀升降机构总成;
20.图4为图3的旋转视图;
21.图5为本发明割草机器人电控原理图一;
22.图6为本发明割草机器人电控原理图二。
23.【主要元件符号说明】
[0024]1‑
车架
[0025]2‑
橡胶履带
[0026]3‑
驱动轮
[0027]4‑
电气柜
[0028]5‑
急停开关
[0029]6‑
电量显示屏
[0030]7‑
开关按钮
[0031]8‑
遥控天线
[0032]9‑
汽油机
[0033]
10
‑
割刀升降机构总成
[0034]
11
‑
多星多频gnss天线
[0035]
12
‑
摄像头
[0036]
13
‑
电池柜
[0037]
14
‑
固定架
[0038]
15
‑
连杆一
[0039]
16
‑
过渡安装管
[0040]
17
‑
升降架
[0041]
18
‑
升降导轨
[0042]
19
‑
连杆二
[0043]
20
‑
挡尘板
[0044]
21
‑
刻度尺
[0045]
22
‑
滑块导轨
[0046]
23
‑
滑块
[0047]
24
‑
滑块安装板
[0048]
25
‑
固定导轨
[0049]
26
‑
电推杆
[0050]
27
‑
销轴一
[0051]
28
‑
销轴二
[0052]
29
‑
销轴三
[0053]
30
‑
销轴四
[0054]
31
‑
销轴五
[0055]
32
‑
刻度指针
[0056]
33
‑
轴套
[0057]
34
‑
割刀安装柄
[0058]
35
‑
割刀片
[0059]
36
‑
支重轮
[0060]
37
‑
张紧轮
[0061]
38
‑
接收机
[0062]
39
‑
自主导航控制器
[0063]
40
‑
数传电台a2
[0064]
41
‑
电机驱动器
[0065]
42
‑
驱动电机
[0066]
43
‑
车辆控制器
[0067]
44
‑
数传电台a1
[0068]
45
‑
数传天线
[0069]
46
‑
遥控器
[0070]
47
‑
数传电台b
[0071]
48
‑
智能终端
具体实施方式
[0072]
为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的割草机器人其具体实施方式、结构、特征及其功效,详细说明如后。
[0073]
请参阅图1
‑
6,其为本发明割草机器人的各部分示意图,该割草机器人包括车架1和固定在该车架1上的行走机构、割刀升降机构10以及控制系统,其中所述的行走机构固定装配在车架1两侧,其包括装配在车架1两侧的驱动电机42和与该驱动电机42输出轴连接的驱动轮3,行走机构还包括与驱动轮3啮合传动的履带2和支撑在车架1底部两侧、用于支撑和张紧该履带2的支重轮36和张紧轮37。其中所述支重轮36和张紧轮37沿车架1行走方向分布,所述驱动轮3通过履带2带动支重轮36和张紧轮37转动。在本发明实施例中,所述履带2
在驱动轮3、支重轮36以及张紧轮37的支撑下呈三角形布置,且该三角形非直角三角形。较佳的,所述车架1是以碳素钢矩管为主要构件焊接而成的。
[0074]
所述割刀升降机构10包括割刀旋转部件和升降部件,所述升降部件包括固定在车架1上的固定架14和连接在该固定架14上的升降架17,其中固定架14上设有沿水平方向延伸的固定导轨25和沿竖直方向延伸的滑块导轨22。所述固定导轨25上固定设置有电推杆26,销柱四30和销轴五31分别装配在电推杆26两端的安装孔内,该销柱四30和销柱五31另一端穿过固定导轨25,且分别转动穿设在连杆二19和连杆一15上端的孔内。当电推杆26两端向外推出时,销柱四30和销柱五31分别带动连杆二19和连杆一15上端沿固定导轨25向外侧相背移动,当电推杆26两端向内收缩时,所述销柱四30和销柱五31分别带动连杆二19和连杆一15上端沿固定导轨25向内侧相向移动。
[0075]
所述升降架17上固定有沿水平方向延伸的升降导轨18和固定在该升降架17一侧的滑块23,其中滑块23滑动装配在固定架上的滑块导轨22上,所述连杆一15和连杆二19下端分别通过销轴二28和销轴一27实现与升降导轨18的滑动连接,且所述连杆一15和连杆二19交叉布置,从而使得固定架14和升降架17能够通过连杆一和连杆二之间角度的变化(端部间距的变化)来实现二者之间高度的差的调整。而滑块23与滑块导轨22的配合使得所述升降架17能够相对固定架14沿竖直方向移动,防止其水平偏摆。
[0076]
在本发明实施例中,所述连杆一15和连杆二19中部交叉,并在交叉的位置通过销轴三29连接,所述连杆一15和连杆二19均能够绕销轴三灵活转动,但并不限定于此。
[0077]
在本发明实施例中,所述固定架14上的滑块导轨22一侧还设有用于显示升降架17升降高度的刻度尺21,所述滑块上23安装有刻度指针32,可以指示刻度尺21上面的刻度,以直观查看割刀高度,但并不限定于此。
[0078]
在本发明实施例中,所述滑块23位于升降架17一侧竖直延伸的固定杆上,且当升降架17降至最低位置时,所述滑块23滑动至滑块导轨22底部,但并不限定于此。
[0079]
所述旋转部件包括固定装配在升降架17上的汽油机9,该汽油机9的输出轴伸至升降架17底部并通过轴套33与割刀安装柄34连接,该割刀安装柄34左右两端分别固定安装有一个割刀片35,且该割刀安装柄34上的割刀片的刃口指向同一个转向。在本发明实施例中,所述轴套33与割刀安装柄34焊合为一体,该轴套33套装在汽油机9输出轴上。割刀片35在汽油机的驱动下随割刀安装柄34旋转,从而实现割草的目的。
[0080]
在本发明实施例中,所述升降架17底部还固定有用于防止杂草等影响升降机构升降性能的挡尘板22,该挡尘板能够将升降架17与割刀片完全隔离,防止割下的草上扬进入升降架中。所述挡尘板22上设有供汽油机9输出轴穿过的通孔。
[0081]
本发明割草机器人的割刀升降机构总成的工作原理介绍如下:当电推杆26推出到最大行程时,连杆一15和连杆二19绕销轴三29开叉最大,使升降架17升到最高位置,因为安装着割刀片35的汽油机9安装在升降架17上,所以割刀片35升到最高位置;当电推杆26收回到最小行程,连杆一15和连杆二19绕销轴三29开叉最小,使升降架17降到最低位置,割刀片35降到最低位置。在升降的过程中,滑块23在滑块导轨22上上下滑动,起到给升降架17导向稳定作用。挡尘板20用于防止草屑飞溅,它通过过渡安装管16和螺栓安装在升降架17下方。
[0082]
在本发明实施例中,所述固定架14和升降架17均为焊合件,固定架14用于使整个机构通过螺栓安装在车架1上。
[0083]
所述控制系统固定在车架1上,且该控制系统包括电器柜4、摄像头12、用于接收遥控器信号,以实现遥控功能的遥控天线8、用于定位,以实现自动驾驶功能的多星多频gnss天线11以及存放有用于供电的锂电池的电池柜13,其中所述电器柜4内设有用于驱动驱动电机42的电机驱动器41和用于控制电机驱动器41和电推杆26的车辆控制器43,该电器柜4内还设有自主导航控制器39、接收机38、rtk模块49以及数传电台a1,其中所述接收机38能够通过遥控天线8接收遥控器46发送的指令信息,并将该信息发送至自主导航控制器,该自主导航控制器39通过车辆控制器43控制机器人移动,该自主导航控制器39能够通过车辆控制器43实现对割草机器人行走路线、行进方向、行进速度以及割刀高度等的控制。rtk模块将差分定位数据和通过多星多频gnss天线接收到的坐标数据进行求差解算,得到机器人的定位数据并传送至自主导航控制器39。所述自主导航控制器39通过数传电台a1将割草机器人的状态数据经数传天线45传送至控制室的智能终端48中,该智能终端48通过数传电台b47接收割草机器人端数传电台传递的状态数据。且该智能终端48还可以为机器人设计作业点并将控制数据经数传电台b发送出去。
[0084]
所述摄像头12采集视频数据并将其通过数传电台a2传递至数传电台b,数传电台b将该适配数据传递至智能终端,有利于在自动驾驶状态进一步掌握行车情况,也用于遥控操作时掌握路况。
[0085]
所述控制系统还包括装配在车架1上的急停开关5,该急停开关5能够在整机出现失控或其他意外情况下,用于紧急断电的装置,在停机存放时也保持断电,在整机正常运行时保持连通。
[0086]
该控制系统还包括装配在车架1上的电量显示屏,该电量显示屏用于显示电池的电量。
[0087]
该控制系统还包括位于车架1上的开关按钮7,该开关按钮7包含上电指示灯,在急停开关5保持连通的情况下,按下开关按钮7,上电指示灯亮起,整机通电,再按开关按钮7,上电指示灯熄灭,整机断电。
[0088]
本发明割草机器人在使用时,在急停开关5为通电状态,打开按钮开关7,整机上电。此时可以通过遥控功能把整机开入作业场地,从rtk设备获取gps数据,等待进入固定解状态,通过智能终端规划作业场景及作业航点,执行作业任务,执行运动控制指令。
[0089]
以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1