用于联合收割机的智能混合动力传动系统的制作方法
1.本公开涉及优化联合收割机性能的各个方面同时实现内燃发动机小型化的智能混合动力传动系统。
背景技术:
2.联合收割机(也称为“农业联合收割机”)大大提高了收割、脱粒、清洁和收集玉米、油菜、大豆、小麦、燕麦、稻谷、向日葵和其他作物以便分发给消费者的效率。一般而言,联合收割机是在收割机在作物田地上行驶时能够收割大片作物同时将未破碎的谷物与破碎的谷物和除了谷物以外的材料(material other than grain,mog)分离的相对复杂的自推进式机器。在清洁之后,收割的谷物被递送到粮箱中(通常通过输送通过清洁谷物升运器来进行)。当对粮箱填装时,收割的谷物然后通过卸粮螺旋推运器从联合收割机上卸载。具体而言,在联合收割机静止时(静态卸载)的同时或者在联合收割机继续主动收割(活动式卸载)的同时,联合收割机可以将谷物卸载到谷物运输车辆,诸如由拖拉机牵引的谷物推车或货车。重复地对粮箱填装和卸载的这种过程在本文中被称为“联合收割机收割循环”。联合收割机的推进、谷物卸载和各种农作物材料处理功能通常利用联合收割机上的单个内燃发动机(诸如重型柴油发动机)提供动力。一般而言,联合收割机发动机的尺寸被确定成提供足够的动力输出能力,以适应相对较重或要求较高的发动机负载状况,当摄入和处理相对密集(高产量)的作物时,当在上坡收割时以及在联合收割机的活动式卸载期间,可能会周期性地遇到这种负载状况。
技术实现要素:
3.公开了用于在联合收割机上使用的智能混合动力传动系统。智能混合动力传动系统的实施例包括:发动机,该发动机被配置成产生用于为联合收割机的推进和粮箱卸载功能提供动力的发动机动力输出;控制器架构;以及电驱动子系统。电驱动子系统又包括电池电源和马达/发电机,该马达/发电机被配置为选择性地由电池电源供应动力以补充发动机动力输出、或者由发动机供应动力以对电池电源充电。在耦接到电池电源和发动机的情况下,控制器架构被配置成:(i)当联合收割机进入具有箱填装阶段和箱卸载阶段的联合收割机收割循环时,监测电池电源的当前充电状态(state of charge,soc);(ii)在箱填装阶段期间,操作马达/发电机以补充发动机动力输出并调节电池放电的速率,以防止在箱填装阶段完成之前电池电源的当前soc降低到预定soc下限阈值以下;以及(iii)在箱卸载阶段,操作马达/发电机对电池电源充电,直到电池电源的当前soc等于或大于第一预定soc上限阈值,从而使得联合收割机收割循环能够重复。
4.在另外的实施例中,智能混合动力传动系统包括:发动机,该发动机被配置为产生用于为联合收割机的推进和粮箱卸载功能提供动力的发动机动力输出;机载传感器,该机载传感器被配置为提供指示粮箱的填装水平的数据;以及电驱动子系统,该电驱动子系统具有电池电源和马达/发电机,该马达/发电机由电池电源供应动力以补充发动机动力输
出、或由发动机供应动力以对电池电源充电。控制器架构耦接到机载传感器和耦接到电驱动子系统。控制器架构被配置成:(i)当联合收割机进入具有箱填装阶段和箱卸载阶段的联合收割机收割循环时,监测电池电源的当前充电状态(soc);(ii)在箱填装阶段期间,操作马达/发电机以补充发动机动力输出,并调节电池电源的放电的速率,以将当前soc维持处于动态soc最低值或以上,该动态soc最低值具有与粮箱的当前填装水平相关地变化的值;以及(iii)在箱卸载阶段期间,操作马达/发电机以对电池电源充电。
5.一个或多个实施例的细节在附图和以下描述中阐述。根据说明书、附图和权利要求,其他特征和优点将变得显而易见。
附图说明
6.下文将结合以下附图描述本公开的至少一个示例:
7.图1是根据示例性实施例示出的配备有智能混合动力传动系统的联合收割机的示意图;
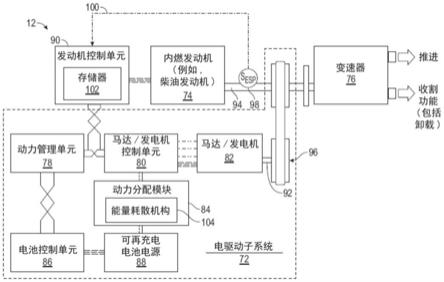
8.图2更详细地示意性地示出了智能混合动力传动系统的示例性实施例,并且除了其他部件之外,还包括发动机、电驱动子系统和共同形成处理子系统或控制器架构的处理部件;
9.图3是由智能混合动力传动系统(图1和图2)的控制器架构适当实施以在不同操作模式之间主动切换电驱动子系统的示例方法的流程图;
10.图4和图5是示出由智能混合动力传动系统(图1和图2)的控制器架构在动力辅助和快速再充电模式之间选择性地切换电驱动子系统时适当应用的示例性混合动力管理方案的曲线图;
11.图6是绘制多个扭矩曲线的曲线图,每个扭矩曲线对应于可再充电电池电源的不同充电状态(soc)范围,并且当电驱动子系统在动力辅助模式下操作时潜在地由控制器架构用于控制马达/发电机的动力输出;
12.图7是绘制示例方式的曲线图,响应于联合收割机的箱填装水平方面的变化,可以由控制器架构以所述方式建立并主动调节用于约束可再充电电池电源的放电的动态soc最低值;以及
13.图8和图9是在位于联合收割机的驾驶室中的显示设备上合适地生成以视觉上表达与智能混合动力传动系统相关的不同参数的图形的示例。
14.不同附图中相同的参考符号指示相同的元件。为了说明的简单和清楚,可以省略众所周知的特征和技术的描述和细节,以避免不必要地模糊在随后的详细描述中描述的本发明的示例和非限制性实施例。还应当理解的是,除非另有说明,否则出现在附图中的特征或元件不一定按比例绘制。
具体实施方式
15.本公开的实施例在上面简要描述的附图中示出。如所附权利要求中所阐述那样,在不脱离本发明的范围的情况下,本领域技术人员可以设想对示例实施例的各种修改。
16.概述
17.如上所述,现代联合收割机通常装备有其尺寸被确定为适应联合收割机操作期间
周期性遇到的峰值发动机负载需求的重型柴油发动机或其他内燃发动机。例如,根据联合收割机的整体尺寸和能力,现代中型联合收割机可能配备有最大额定动力输出能力超过74千瓦(kw)的柴油发动机。虽然现代柴油发动机可以配备有用于减少排放(例如,排气气体再循环系统)和提升发动机输出动力(例如,涡轮增压模块)的各种系统,但是当相对较大的内燃发动机在联合收割机操作的大部分阶段期间,包括联合收割机收割循环(在联合收割机收割循环期间,联合收割机执行将谷物收集在粮箱中(本文中为“箱填装阶段”)以及然后当装满时将保存在粮箱中的谷物卸载到谷物推车或其他谷物运输容器中(本文中为“箱卸载阶段”)的动作)期间,以次优动力输出水平操作时,导致低效率。更一般而言,随着联合收割机的内燃发动机的尺寸和最大额定动力输出增加,燃油效率水平和排放倾向于恶化。虽然可以简单地小型化部署在特定联合收割机上的柴油发动机(或其他内燃发动机),以实现更高的燃料效率、节省重量和成本并减少排放,但是使用较小的柴油发动机有在较重发动机负载期间动力输出可用性不足的风险,这可能导致失速状况和其他负面结果,从而降低整体收割效率和客户满意度水平。
18.混合动力传动系统提供了联合收割机上内燃发动机(发动机)的小型化的潜力。特别地,通过结合能够作为电动马达操作的电动机器(e-machine),电动机器的机械动力输出(轴速度和扭矩)可以通过合适的传动系布置将这些机械动力输出相加来补充发动机的动力输出。可以利用包含在电驱动子系统中的合适的电池源或电源(例如,包括多个互连电池单元的电池组)来选择性地驱动电动机器。当也能够由发动机反向驱动以产生电力时,该电动机器可以被具体称为“马达/发电机”,当拥有可再充电化学物质(诸如锂离子化学物质或镍-钴-铝(nickel-cobalt-aluminum,nca)化学物质时,该电力然后可以被用于对电池电源充电。处理子系统或“控制器架构”(其可以由任意数量的单独控制器(例如,发动机控制单元、动力管理控制单元和马达/发电机控制单元)构成)可以操作马达/发电机来补充发动机动力输出,并在某些状况下调节电池放电的速率,诸如在联合收割机收割循环的箱填装阶段期间。为了便于参考,这个动作在这本文被称为将电驱动系统置于“动力辅助模式”。相反,控制器架构可以在其他状况下,诸如在联合收割机收割循环的箱填装阶段期间,操作马达/发电机来对电池电源充电。这在本文被称为将电驱动系统置于“快速充电模式”。
19.本公开的实施例利用这种电驱动子系统的能力来在电驱动子系统的操作模式之间策略性地切换时以及在联合收割机操作期间当被置于特定模式时控制电驱动子系统的行为时引入智能水平。出于这个原因,本公开的实施例通常被称为“智能混合动力传动系统”。智能混合动力传动系统的实施例包括电驱动子系统,其包含可再充电电池电源和呈马达/发电机的形式的电动机器。如上所述,电驱动子系统可在(i)动力辅助模式(在该动力辅助模式下,马达/发电机通过可再充电电池电源驱动,以补充由联合收割机的发动机(例如,重型柴油发动机)提供的动力输出)以及(ii)快速充电模式(在该快速充电模式下,马达/发电机由发动机反向驱动以对可再充电电池电源充电)下操作。如术语“快速充电模式”中的描述符“快速”所指示那样,快速充电模式下的电池再充电的速率(r
再充电
)通常将超过动力辅助模式下的电池放电的速率(r
放电
)。例如,在某些实施例中,r
放电
可以具有受控的变量值(例如,根据下面描述的扭矩曲线由控制器架构改变),而r
再充电
可以具有基本恒定的值,该值至少是r
放电
的绝对最大值的两倍。
20.控制器架构还可操作地耦接到电驱动子系统的各种部件,并确定何时将电驱动子
系统模式置于动力辅助模式、快速充电模式以及潜在地其他操作模式,诸如静态或待机操作模式。在某些实施方式中,例如控制器架构在联合收割机进入具有箱填装阶段和箱卸载阶段的联合收割机收割循环时监测电池电源的当前充电状态(soc);在联合收割机收割循环的箱填装阶段期间操作马达/发电机以补充发动机动力输出;并且进一步操作马达/发电机以在联合收割机收割循环的箱卸载阶段期间对电池电源充电。进一步,在箱填装阶段期间,控制器架构可以操作马达/发电机以补充发动机动力输出,同时调节电池放电的速率以防止电池电源的当前soc在箱填装阶段完成之前下降到预定soc下限阈值以下。相比之下,在箱卸载阶段期间,控制器架构可以操作马达/发电机来对电池电源充电,直到电池电源的当前soc等于或大于第一预定soc上限阈值,从而使得联合收割机收割循环能够重复。箱卸载阶段可以在联合收割机的“低动力卸载”期间进行。如本文出现的术语“低动力卸载”指的是从联合收割机的粮箱卸载散装谷物,同时联合收割机保持静止(静态卸载)或者同时当联合收割机进入主动收割时以显著小于联合收割机的典型地面速度的较低速度(例如低于每小时一英里(mph)的地面速度)行驶。
21.借助于上述混合动力管理方案,智能混合动力传动系统的实施例使得联合收割机发动机能够小型化以提供燃料经济性方面的增强、降低的排放、成本节省以及其他益处。同时,在联合收割机的联合收割机收割循环的箱填装阶段期间,通过动力辅助模式的策略性应用来解决动力限制问题;并且,具体而言,通过以受控(可变或非可变)速率对可再充电电池电源放电来驱动马达/发电机,并且在联合收割机收割循环的箱填装阶段期间补充发动机的动力输出。进一步,控制可再充电电池电源在箱填装阶段期间放电的速率以确保在每个粮箱填装阶段中的足够动力供应;也就是说,在联合收割机摄入和处理足够的作物材料以利用散装谷物填装或基本上填装粮箱的时间段内,使联合收割机准备好进行箱卸载阶段。随后,在箱卸载阶段(例如,当联合收割机静止或以其他方式具有小于1mph的地面速度时进行),控制器架构将电驱动子系统转变到快速充电模式下的操作(即,操作马达/发电机以对电池电源充电)中,以利用联合收割机(车辆负载)的相对低的动力输出需求,并将可再充电电池电源快速再充电到足以重复以上描述的过程或循环的水平。计算表明,电池电源可以在相对短的卸载时段内(通常在约两分钟的量级)快速再充电到足够的水平,以允许这个电源管理循环以基本上无限期的方式重复。进一步,尽管在联合收割机收割循环的箱填装阶段期间,可再充电电池电源以较慢的速率放电,但是可以向马达/发电机提供足够的电动力,以提供足够的动力辅助水平,从而实现了联合收割机发动机尺寸方面的明显减小,如下面结合图4和图5进一步描述的那样。
22.作为上述混合动力管理方案的另一益处,联合收割机的发动机以更高的优化速度范围操作的持续时间被延长,以获得发动机性能、燃料经济性和减少排放方面的进一步提高。例如,考虑部署在联合收割机上并且包括超大(高动力输出)柴油发动机的常规非混合动力传动系统。在大多数客户使用应用中,这种超大发动机在大多数主动收割场景期间通常远低于其峰值动力输出能力操作,并且在联合收割机的低动力(例如静态)卸载期间更是如此。相比之下,通过使用较小的主内燃发动机,智能混合动力传动系统的实施例使得发动机能够在更接近发动机的最大额定动力输出的更高效率动力输出水平下以及在日益优化的轴速度范围内操作。进一步,在联合收割机的低动力卸载(对应于联合收割机收割循环的箱卸载阶段)期间,通过进一步加载发动机以反向驱动马达/发电机并支持上述快速充电功
能,发动机的发动机轴输出速度可以被维持处于相对高的优化水平。因此,在本公开的至少一些实施例中,这种智能混合动力管理方案不仅能够小型化联合收割机发动机,而且通过减少发动机轴输出速度方面的变化和使轴输出速度趋向混合联合收割机动力管理循环中的最佳速度范围,来进一步优化发动机效率。
23.当部署在联合收割机上时,智能混合动力传动系统可以进一步被利用来帮助最小化或减少(通俗地说,“消除”)发动机负载状况中的明显的瞬态变化。在这样的实施方式中,智能混合动力传动系统的控制器架构可以通过例如监测发动机的输出轴速度和/或指示置于发动机上的当前负载的任何附加传感器输入来监测发动机负载状况中的暂时峰值或间歇。当检测到发动机在期间被放置在超过上限发动机负载阈值的增加的负载下的瞬态重负载状况(例如,由于上坡行驶、堵塞清除或所摄入的作物材料的密度或一致性方面的暂时增加)时,控制器架构可以增加电驱动子系统补充发动机动力输出的水平,直到瞬态重负载状况过去。相反,当检测到发动机在期间暂时被放置在小于下限发动机负载阈值的降低负载下的轻微瞬态负载状况(例如,由于下坡行驶或在联合收割机收割循环期间摄入到联合收割机中的作物材料流方面的暂时中断)时,控制器架构暂时将电驱动子系统置于快速充电模式。虽然这个示例混合动力管理方案本质上是反应性的,但是混合动力管理方案的各方面也可能在快速充电和动力辅助操作模式之间的转变中是主动的。例如,当预测到放置在发动机上的负载方面的暂时增加时(例如,由于分离器滚筒或滚筒响应于操作员输入命令的初始旋转启动),控制器架构还可以暂时将电驱动子系统置于动力辅助模式(例如,与分离器滚筒的激活同时或稍早于分离器滚筒的激活)以补充发动机动力输出,直到重瞬时负载状况过去。
24.在智能混合动力传动系统的另外实施例中,并且以类似于刚刚描述的方式,控制器架构可以操作马达/发电机或者以其他方式控制电驱动子系统,以促进(更好地维持)发动机输出轴在优化的准等时范围内的旋转。发动机输出轴的这种优化速度范围可以由下限速度阈值和上限速度阈值来界定,这两个阈值存储在控制器架构可访问的计算机可读存储器中。在这样的实施例中,当发动机输出轴的旋转速度在联合收割机收割循环期间增加到上限速度阈值以上时,控制器架构可以将电驱动子系统置于快速充电模式;并且当发动机输出轴的旋转速度下降到下限速度阈值以下时,进一步将电驱动子系统置于动力辅助模式。同样,通过在联合收割机操作期间使发动机的发动机输出轴能够在日益优化的一致的速度范围内旋转,或者以其他方式利用电驱动子系统来提供联合收割机发动机的负载均衡,发动机性能和效率被提升,同时排放被降低。
25.智能混合动力传动系统的实施例可以实行另外的功能来优化电池存储特性,特别是在给定可再充电电池电源通常拥有小于电池电源的全部存储容量的最佳充电状态(soc)范围的情况下。因此,在实施例中,智能混合动力传动系统的控制器架构可被配置成在联合收割机操作期间监测可再充电电池电源的当前soc,并执行以下动作中的至少一个:(i)当可再充电电池电源的当前soc达到比智能混合动力传动系统的存储在控制器架构可访问的存储器中的上述第一预定阈值大的第二预定阈值(例如,最大的最佳soc阈值)时,阻止可再充电电池电源的进一步充电;以及(ii)当可再充电电池电源的当前soc达到如进一步存储在存储器中的下限阈值(例如,最小的最佳soc阈值)时,阻止可再充电电池电源的进一步放电。如本文出现的那样,提及“阻止”电池电源的进一步充电或放电表示与当电驱动子系统
被置于快速充电模式时电池电源的典型充电或当电驱动子系统被置于动力辅助模式时电池电源的典型放电相比,完全阻止或至少显著减缓了电池电源的附加充电或放电。值得注意的是,在某些实施例中,电驱动子系统可以配备有能量耗散机构(例如,将电能转换为废热的电阻器),该能量耗散机构电耦接在马达/发电机和可再充电电池电源之间,并且可以由控制器架构选择性地激活,以实现发动机输出轴的马达/发电机制动(例如,以支持上述等时辅助模式),同时当电池电源的当前soc接近或超过最大的最佳soc阈值时,防止或至少最小化可再充电电池电源的充电。
26.在本公开的其他实施方式中,控制器架构可以进一步执行其他充电和放电控制方案,以增强混合动力管理和智能混合动力传动系统的整体性能。例如,在实施例中,智能混合动力传动系统可以包括多个扭矩曲线存储在其中的存储器,其中每个扭矩曲线与可再充电电池电源的不同soc范围相关联。在智能联合收割机动力传动系统的操作期间,控制器架构监测可再充电电池电源的当前soc,并根据对应于可再充电电池电源的当前soc的多个扭矩曲线中的所选择的一个来改变马达/发电机的动力输出。具体而言,在后一方面,控制器架构可以改变马达/发电机的动力输出,使得马达/发电机的动力输出和发动机的动力输出的总和基本上等于发动机输出轴的当前转速的扭矩目标,如所选择的扭矩曲线所指示那样。这样,控制器架构可以更好地保存或管理可再充电电池电源的soc,同时根据联合收割机操作员熟悉的扭矩曲线或廓线产生总动力输出。
27.补充或替代上述的其他过程和功能,智能混合动力传动系统的实施例可以应用另外的混合动力管理技术。例如,在其中在联合收割机的箱填装阶段外允许电池放电的情况下,智能混合动力传动系统的实施例可以采取某些保扩性措施,以确保在可再充电电池电源中维持足够的能量储备,从而在联合收割机收割循环的给定箱填装阶段中完全为马达/发电机供应动力。至少在某些情况下,这可以利用动态soc最低值方法来实现。在这方面,在智能混合动力传动系统的操作期间,控制器架构可以基于由控制器架构利用联合收割机上的合适传感器(例如包含在联合收割机的粮箱中的称重传感器和/或质量流率传感器)所监测的粮箱的当前填装水平来调节动态soc最低值的位置。控制器架构还监测可再充电电池电源的当前soc并且,当可再充电电池电源的当前soc达到(或接近)其当前位置的动态soc最低值时,控制器架构阻止(防止或显著减缓)可再充电电池电源的进一步放电。这样,控制器架构确保维持足够的电池动力储备以在联合收割机收割循环的箱填装阶段提供所期望的动力辅助;并且注意,当联合收割机的粮箱装满散装谷物时,动态soc最低值可以等于上述最小的最佳soc阈值。下面结合图6描述用于增强的soc管理的示例性动态soc最低值方法的附加描述。
28.如下文结合图1所示和讨论的那样,下面将描述示例性联合收割机的场景中的智能混合动力传动系统的示例。附加地,可以由智能混合动力传动系统的控制器架构实行以执行本文所述的各种任务或过程的方法或过程将在下文结合图2至图7进行阐述。最后,在下文结合图8和图9描述可以在位于联合收割机的驾驶室中的显示设备上选择性地生成以视觉上告知联合收割机操作员智能混合动力传动系统的某些操作参数(例如,可再充电电池电源的当前soc、瞬时发动机动力输出、电驱动子系统的当前操作模式等)的图形的示例。以下描述仅通过非限制性图示的方式提供,并且不应被解释为以任何方式不适当地限制所附权利要求的范围。
29.配备有智能混合动力传动系统的示例性联合收割机
30.参考图1,示意性地描绘了配备有智能混合动力传动系统12的示例联合收割机10。联合收割机10通过图示的方式呈现,以建立在其中可以更好地理解智能混合动力传动系统12的实施例的非限制性示例场景。在另外的实施例中,联合收割机10可以采取其他形式,并且可以包括适合于在田地14上行驶时处理摄入到收割机10中的作物植物的部件的不同组合。进一步,为了说明清楚,在图1中仅示出了智能混合动力传动系统12的所选择的部件,诸如控制器架构16。下文结合图2至图9提供示例智能混合动力传动系统12以及混合动力传动系统12的操作的另外的图示和讨论。
31.示例联合收割机10包括由多个地面接合车轮20支撑的底盘主体或主机架18。地面接合车轮20由未示出的发动机和传动系(包括例如电控液压变速器)供应动力。在主机架18的前向部分顶上,驾驶室22包围操作员站,该操作员站包括操作员座椅(未示出)、至少一个显示设备24和操作员接口26。喂料室28以通常低于驾驶室22的高度安装到联合收割机10的主机架18的前向部分。各种收割台或更简单地说“割台”以可互换的方式附接到喂料室28,以例如允许定制联合收割机10用于收割特定的作物类型。图1中示出了一个这样的割台的示例,在此是收割平台30。
32.在联合收割机10在田地14上在前向方向上行驶时,收割平台30将切断的农作物收集到喂料室28中,然后该喂料室将切断的农作物合并以便输送(例如,通过包含在喂料室28中的未示出的带式输送器)到联合收割机10的内部。在联合收割机10内,作物植物被旋转的滚筒输送器或“脱粒滚筒”32接合,该滚筒输送器或“脱粒滚筒”将作物植物在大致向上的方向上引导到旋转脱粒和分离区段34中。旋转脱粒和分离区段34可以包括用于执行从其它植物材料中分离谷物和谷壳的期望功能的各种部件。所示的旋转脱粒和分离区段34例如包括具有脱粒特征并可旋转地安装在壳体或滚筒外壳38中的滚筒或脱粒滚筒36。脱粒滚筒36在滚筒外壳38内的旋转导致谷物和谷壳两者通过凹部40的分离格栅落下并进入下部谷物清选区段42的入口。同时,秸秆和类似的mog被引导朝向旋转脱粒和分离区段34的出口端44,并最终被递送到另一旋转滚筒或“卸料搅拌器(beater)”46以便从联合收割机10的后端排出。
33.现在更详细地讨论谷物清选区段42,联合收割机10的这个区段包括适于清选新收割的谷物同时从其中分离谷壳的各种部件。这些部件可以包括谷壳筛48、筛网50和任意数量的风扇(未示出)。通过谷物清选区段42的作用,新清选的谷物被引导到清洁谷物升运器52中,以便向上输送到联合收割机10的储存容器或粮箱54中。至少一个相机56被定位成捕获沿着散装谷物流运输的谷物的图像。具体而言,在实施例中并且如图1所示,相机56可以被定位为靠近清洁谷物升运器52,以捕获经由升运器52运输到粮箱54中的散装谷物的图像。随着清洁谷物升运器52将新收割的谷物运输到粮箱54中,筛余物(tailings)落在延伸穿过清洁谷物升运器52的下部部分的返回升运器58上。返回升运器58然后将筛余物再循环回到脱粒滚筒36的入口,用于进一步脱粒,以允许以上描述的谷物加工步骤重复,并使联合收割机10的谷物产量最大化。
34.以以上描述的方式,联合收割机10有效地从田地14中摄取切断的作物植物、从作物植物中提取谷物、清选新提取的谷物,并且然后将谷物储存在粮箱54中用于利用例如卸粮螺旋输送器60进行随后的卸载。而且,在联合收割机10的使用期间,联合收割机10内的某
些部件可以在位置方面进行调节,或者可以利用任意数量的致动器62(诸如液压或电控线性或旋转致动器,这些致动器中的一个在图1中一般由符号62表示)来修改这些部件的操作参数。在这点上,任何数量的风扇或传送带的操作速度可以变化,任何数量的未示出的偏转器、谷壳筛部件、筛网部件等的位置也可以变化。这种致动器62可以响应于经由位于驾驶室22内的操作员接口26接收的操作员输入而被控制、经由由包括在智能混合动力传动系统12中的控制器架构16发出的命令信号被控制、或者由联合收割机10上的另一控制器或控制单元以其他方式命令。
35.位于驾驶室22内的操作员接口26可以是由操作员用来向智能混合动力传动系统12输入命令或以其他方式控制智能混合动力传动系统12的任何设备或设备组。在各种实施方式中,操作员接口26可以集成到显示设备24中或者以其他方式与显示设备相关联。在这点上,操作员接口26可以包括位于显示设备24上或附近的物理输入(例如,按钮、开关、拨号盘等)、集成到显示设备24中的触摸屏模块、或用于定位用于与显示设备24上生成的gui元素交互的光标的光标输入设备(例如,操纵杆、轨迹球或鼠标)。相比之下,显示设备24可以是被配置为用于在联合收割机10的驾驶室22内操作的任何图像生成设备。在实施例中,显示设备24可以附着到驾驶室22的静态结构,并且以低头显示器(head-down display,hdd)配置来实现。联合收割机10包含除了以上提及的那些传感器之外的各种其他传感器,这些传感器可以在智能混合动力传动系统12的操作期间向控制器架构16供应数据。这种附加传感器的非穷举列表可以包括用于提供指示体积密度的电容测量值的谷物水分传感器64、质量流量传感器66(例如,冲击板)以及位于粮箱中的一个或多个称重传感器68(例如,用于称量所储存的谷物并校准质量流量传感器)。在实施例中,联合收割机10还可以包括用于测量谷物损失的传感器,诸如被定位在分离器处的一个或多个清选装置损失传感器70(例如,撞击传感器)和/或未示出的(例如,撞击)传感器。
36.现在参考图2,更详细地示意性描绘了智能混合动力传动系统12。智能混合动力传动系统12还包括电驱动子系统72、发动机74和变速器76。电驱动子系统72依次包括动力管理单元78、马达/发电机(m/g)控制单元80、呈马达/发电机82形式的电动机器、动力分配模块84、电池控制单元86和可再充电电池源或电源88。图2中的多条线示出了这些部件之间的电连接,以及进一步包含在智能混合动力传动系统12中的发动机控制单元(engine control unit,ecu)90。马达/发电机82还包括m/g输出轴92,该m/g输出轴通过合适的布置(在此为带式驱动器96)机械地耦接到发动机74的发动机输出轴94,从而使得当电驱动系统72在动力辅助模式下操作时,发动机74和马达/发电机82的相应机械动力输出能够在施加到变速器76时相加;并且当电驱动系统72在快速充电模式下操作时,进一步使得马达/发电机82能够由发动机74反向驱动。智能混合动力传动系统12中可以包括各种其他部件,诸如各种机载传感器,包括前面描述的那些传感器和用于监测输出轴的旋转速度的传感器98。ecu 90通过有线或无线数据连接100从传感器98接收数据,并且可能地从机载传感器接收指示发动机74的当前动力输出的其他数据,以适当地实行下面描述的功能。
37.因此,图1中示出的控制器架构16对应于图2中示出的ecu 90,并且还可以包括智能混合动力传动系统12中包括的各种其他处理或控制器元件,诸如包含在电驱动子系统中的动力管理单元78、m/g控制单元80和电池控制单元86。一般而言,智能混合动力传动系统12的控制器架构16可以采取适合于执行贯穿本文档描述的功能的任何形式。本文中出现的
术语“控制器”在非限制性意义上用于泛指智能混合动力传动系统12的处理架构。控制器架构16可以涵括任何实际数量的处理器、控制计算机、计算机可读存储器、电源、存储设备、接口卡和其他标准化部件或可以与其相关联。控制器架构16还可以包括被设计成实行本文描述的各种过程任务、计算和控制/显示功能的任何数量的固件和软件程序或计算机可读指令或与其协作。这种计算机可读指令可以存储在存储器102的非易失性扇区中。虽然在图2中一般示出为单个框,但是存储器102可以涵括适合于存储计算机可读代码或指令以及用于支持智能混合动力传动系统12的操作的其他数据的任何数量和类型的存储介质。在实施例中,存储器102可以集成到控制器架构16中,例如作为系统封装、片上系统或另一种类型的微电子封装或模块。
38.在联合收割机10的操作期间(图1),发动机74产生用于通过变速器76驱动联合收割机10的推进和收割(包括卸载)功能的机械动力。这包括在以上描述的喂料室28、旋转脱粒和分离区段34和谷物清选区段42中包括的各种部件的运动。ecu 90调节发动机74的各种功能以控制其动力输出。由ecu 90(以及更一般地,发动机控制系统)用来改变发动机动力输出的被致动的设备在发动机平台之间不同,但是一般而言包括控制在每个燃烧循环递送到发动机燃烧室的燃料和氧气的量(由空气体积、密度和温度确定)的一个或多个设备。根据本公开的实施例,ecu 90还经由双向信号通信与电驱动子系统72内的各种控制器单元(例如,动力管理单元78和电池控制单元86)和动力分配模块84协作,以共同形成控制器架构16,该控制器架构执行本文描述的功能;例如在执行下面结合图3描述的示例混合动力管理方法106中执行的那些功能。在某些实施例中,ecu 90(以及更一般地,控制器架构16)可以选择性地激活和去激活在电驱动系统72中包括的能量耗散机构104;例如如图2示意性所示,能量耗散机构104(在提供时)可以电耦接在马达/发电机82和可再充电电池电源88之间,并且可能地集成到动力分配模块84中。当被激活时,能量耗散机构104在将由马达/发电机82产生的电能递送到可再充电电池电源88之前耗散该电能(例如,通过经过将电能的一部分转换成热量的一组电阻器)。因此,提供能量耗散机构104可以使马达/发电机82在期望时提供制动功能,同时阻止(防止或最小化)可再充电电池电源88的再充电。
39.m/g控制单元80和电池控制单元86提供适当的集成功能,从而便于由ecu 90分别控制马达/发电机82和电池控制单元86。动力管理单元78类似地与ecu 90通信,并帮助协调m/g控制单元80和电池控制单元86的控制功能。动力分配模块84在动力驱动子系统72在动力辅助模式下操作时,将电力从可再充电电池电源88内的适当单元路由到马达/发电机82;并且在动力驱动子系统72在快速充电模式下操作时起进一步将由马达/发电机82的反向驱动产生的电力路由到可再充电电池电源88内的各个单元。动力分配模块84、动力管理单元78、m/g控制单元80和电池控制单元86的任何组合可以与ecu 90协作,以执行在下面描述的示例混合动力管理方法106中阐述的功能。在替代性实施例中,各种其他部件可以包括在电驱动子系统72中,或者可以省略任何数量的所示部件,只要智能混合动力传动系统12能够执行本文描述的新颖功能的至少一个子集。
40.接下来转到图3,示出了在由控制器架构16(图1)在动力辅助模式和快速充电模式(可能地除了其他操作模式(例如静态(待机)模式)之外)之间智能地切换电驱动子系统72时适当地实行的混合动力管理方法106。混合动力管理方法106包括多个方法步骤108、110、112、114、116、118、120、121、122、124、126,下面依次描述这些方法步骤中的每一个。取决于
实施混合动力管理方法106的特定方式,图3中一般示出的每个步骤可能需要单个过程或多个子过程。进一步,图3中示出的和下面描述的步骤仅作为非限制性示例提供。在混合动力管理方法106的替代性实施例中,可以执行附加方法步骤,可以省略某些步骤,和/或可以以替代性顺序执行所示的方法步骤。
41.响应于预定触发事件的发生,智能混合动力传动系统12的控制器架构16在步骤108开始执行混合动力管理方法106。一般而言,混合动力管理方法106可以响应于联合收割机10的起动或者可能地指示联合收割机10可能在短期时间范围内进行主动收割的其他事件而被触发或启动。进一步,在某些情况下,可以允许操作员通过与可利用在位于联合收割机驾驶室22中的显示设备24上生成的图形用户界面(gui)进行访问的设置页面或屏幕的交互来激活和去激活(或定制)混合动力管理方法106。
42.在开始混合动力管理方法106(步骤108)之后,控制器架构16前进到步骤110。在步骤110期间,控制器架构16确定是将电驱动子系统72置于动力辅助模式,还是继续在动力辅助模式下操作(如果当前有效的话)。控制器架构16可以确定是利用被动方法(基于机载传感器数据)、利用主动方法(在预期增加的发动机负载的情况下)还是利用两种方法将电驱动子系统72置于动力辅助模式。例如,在各种实施例中,控制器架构16在确定联合收割机10当前在联合收割机收割循环的箱填装阶段期间进行主动收割时,将电驱动子系统72置于动力辅助模式(并因此操作马达/发电机以补充发动机动力输出);并且在联合收割机10在联合收割机收割循环的箱卸载阶段期间转变到从粮箱54中低动力卸载谷物时将电驱动子系统72切换到快速充电模式(从而操作马达/发电机为电池电源充电)。因此,在这样的实施例中,当基于联合收割机10的操作员输入和/或传感器输入确立联合收割机10进行主动收割时,控制器架构16可以确定在步骤110期间将电驱动子系统72置于动力辅助模式可能是合适的;并且当如此确定时,前进到混合动力管理方法106的步骤112。
43.附加地或替代性地,当检测到瞬态重负载状况(或预测其即将发生)时,控制器架构16可以确定电驱动子系统72可以被适当地置于动力辅助模式,在该瞬态重负载状况期间,发动机74在联合收割机收割循环期间被置于超过上限发动机负载阈值的显著增加的负载下;例如由于联合收割机10的上坡行驶、由于摄入密集或潮湿的作物材料、由于联合收割机行驶穿过泥泞的地形或出于其他原因。类似地,如果通常需要来自动力传动系统12的高瞬时动力输出的事件当前正在发生或被预测即将发生(例如,由于经由操作员接口26进入的输入命令),则控制器架构16可以确定电驱动子系统72被适当地置于动力辅助模式(或者至少用于将电驱动子系统72置于动力辅助模式的初始条件已经被满足),并且前进到混合动力管理方法106的步骤112。作为后一方面的示例,控制器架构16可以确定在联合收割机10的操作期间何时发生分离器滚筒或滚筒的初始起动;并且当如此确定时,可以前进到步骤112,以潜在地将电驱动子系统72置于动力辅助模式,如下面进一步描述的那样。在其中智能混合动力传动系统12帮助将发动机轴速度维持在具有最小阈值和最大阈值的优化的通常等时的范围内的其他实施方式中,控制器架构16可以前进到步骤112,以潜在地将电驱动子系统72置于动力辅助模式,以在发动机输出轴速度降低到最小阈值以下时增加发动机输出轴速度,如速度速率传感器98报告的那样。
44.在示例性方法106的步骤112期间,控制器架构16进一步确定在当前时刻是否已经达到最小soc阈值。在某些实施例中,最小soc阈值可以是静态值,在该静态值之上,可再充
电电池电源88的soc被理想地维持以确保电驱动系统72的最佳操作。在其他情况下,最小soc阈值可以是代表动态soc最低值的可变值或动态值,该可变值或动态值基于联合收割机10的粮箱54的当前填装水平进行调节,如下文结合图7所述。如果确定在步骤112期间已经达到最小soc阈值,则控制器架构16前进到步骤124,并确定混合动力管理方法106的当前迭代是否应该终止,如下所述。否则,控制器架构16前进到混合动力管理方法106的步骤114;确定马达/发电机82应该以其操作的目标动力辅助水平或输出;并且然后控制电驱动子系统72(通过调节供应给马达/发电机82的电流或施加在马达/发电机82上的电压)以实现马达/发电机82的目标动力输出。在某些实施例中,当电驱动子系统72被置于动力辅助模式时,马达/发电机82可以被通电或以其他方式被控制以产生基本恒定的机械动力输出。然而,更有用的是,控制器架构16可以命令马达/发电机82产生可变动力输出,该可变动力输出依据发动机输出轴94的当前旋转速率根据预先确立的扭矩、以及可能地根据基于可再充电电池88的当前soc从多个存储的扭矩曲线中选择特定的扭矩曲线而变化,如下面结合图6进一步讨论的那样。之后,控制器架构16前进到步骤124,并确定混合动力管理方法106的当前迭代是否应该终止。
45.如果在示例方法106的步骤110期间替代地确定电驱动系统72不应该被置于动力辅助模式,则控制器架构16继续到步骤116,并且确定电驱动系统72是否应该替代地被置于快速充电模式(或者非充电马达/发电机制动模式,可用的话)。以与先前描述的方式类似的方式,控制器架构16可以确定是利用被动方法(基于机载传感器数据)、利用主动方法(在预期降低的发动机负载的情况下)还是利用这些方法的组合将电驱动子系统72置于动力辅助模式。在各种实施方式中,当联合收割机10进行从粮箱54低动力卸载谷物时,控制器架构16将电驱动子系统72置于快速充电模式。因此,在这样的实施例中,当联合收割机10进行从粮箱54中低动力卸载谷物时,控制器架构16可以最初确定在步骤110期间将电驱动子系统72置于快速充电模式是合适的或适当的。当确定联合收割机10当前在混合联合收割机动力管理循环的箱填装阶段之间进行从粮箱54低动力(例如,静态)卸载谷物时,控制器架构16前进到步骤118并确定是否已经达到最大的最佳soc阈值。附加地,在实施例中,当联合收割机10在主动转弯通道遍次之间进行非收割转弯时,控制器架构16可以自动将电驱动子系统72置于快速充电模式,如下面结合图5和图6进一步描述的那样。
46.在智能混合动力传动系统12的另外的实施方式中,当通过机载传感器数据检测到瞬态轻负载状况时(或者当瞬态轻负载条件被预测即将发生时),控制器架构16可以确定电驱动子系统72潜在地被适当地置于快速充电模式,在该瞬态轻负载状况期间,发动机74在联合收割机收割循环期间被置于下降到下限发动机负载阈值以下的明显降低的负载下;例如,由于联合收割机10的下坡行驶、摄入低密度农作物材料、作物材料通过联合收割机10的机器的流量方面的暂时中断或出于另一原因。类似地,如果通常需要来自动力传动系的高瞬时动力输出的状况或事件当前正在进行中或者被预测即将发生(例如,由于经由操作员接口26进入的输入命令),则控制器架构16可以确定将电驱动子系统72置于动力辅助模式并前进到混合动力管理方法106的步骤110是暂时合适的。作为后一方面的示例,控制器架构16可以确定在联合收割机10的操作期间何时发生分离器滚筒的初始起动;并且当如此确定时,可以前进到步骤112,以潜在地将电驱动子系统72置于动力辅助模式,如下面描述的那样。在其中智能混合动力传动系统12帮助将发动机轴速度维持在具有最小阈值和最大阈
值的优化的等时范围内的其他实施例中,控制器架构16可以前进到步骤112,以潜在地将电驱动子系统72置于动力辅助模式,以在发动机输出轴速度降低到最小阈值以下时增加发动机轴速度。
47.在混合动力管理方法106的步骤118期间,控制器架构16进一步确定是否已经达到最大的最佳soc阈值。在实施例中,最大soc阈值可以是代表最大的最佳soc阈值的静态值,在该最大的最佳soc阈值以下,可再充电电池电源88的soc被理想地维持以确保电驱动系统72的最佳操作。如果确定在步骤118期间可再充电电池电源88的当前soc低于最大的最佳soc阈值,则控制器架构16前进到步骤120,并利用通过发动机74反向驱动马达/发电机82产生的电力开始或继续对可再充电电池电源88进行快速充电。否则,在电驱动子系统72配备有能量耗散机构(诸如图2中一般示出的能量耗散机构104(或者用于允许发动机输出轴94的马达/发电机制动,同时防止或最小化可再充电电池电源88的充电的另一机构))的实施例中,控制器架构16继续到步骤122。在步骤122,控制器架构16激活能量耗散机构104,以允许马达/发电机82减慢发动机输出轴94的旋转速度,例如,帮助将轴输出速度维持在期望的范围内,如前所述;同时防止或至少显著减少可再充电电池电源88的充电。在其他实施例中,步骤122可以从混合动力管理方法106中省略。在步骤120或步骤122之后,控制器架构前进到步骤124,如下所述。
48.如果在示例方法106的步骤116期间确定电驱动子系统72没有被适当地置于快速充电模式(或非充电马达/发电机制动模式),则控制器架构16将电驱动子系统72返回(或维持)处于静态或待机模式(步骤121)。此后,智能混合动力传动系统12的控制器架构16继续到混合动力管理方法106(图6)的步骤124。在步骤124期间,控制器架构16确定混合动力管理方法106的终止是否被允许;例如,由于操作员输入请求终止示例方法106、由于联合收割机10的关闭、或者由于指示联合收割机10将长时间停止主动收割的其他事件。如果确定混合动力管理方法106应该终止,则控制器架构16前进到步骤126,并相应地终止混合动力管理方法106的当前迭代。否则,控制器架构16返回到步骤110,并且混合动力管理方法106的上述方法步骤重复。
49.如上所述,当联合收割机10进行主动收割时,智能混合动力传动系统12的实施例有利地将电驱动子系统72置于动力辅助模式,而当联合收割机10进行从粮箱54低动力(例如,静态)卸载谷物时,将电驱动子系统72暂时转变为快速充电模式。在这种情况下,控制器架构16可以控制电池放电的速率来驱动马达/发电机82,并以确保在混合联合收割机动力管理循环的收割阶段中提供动力辅助的方式补充发动机74的动力输出。进一步,在从联合收割机10低动力(例如,静态)卸载散装谷物期间,并且可能地在发动机装载的其他周期性间歇期间(例如,在田地上的主动收割遍次之间联合收割机10的非收割端转弯期间),控制器架构16将电驱动子系统72切换到快速充电模式,以利用联合收割机10的相对低的动力输出需求,并且将可再充电电池电源88快速再充电到足以重复上述过程的水平,如下文结合图4和图5所述。
50.通过参考分别出现在图4和图5中的曲线图128和130,可以更全面地理解上述混合动力管理方案。首先处理图4所示的混合占空比曲线图128,时间沿着水平轴(横坐标)绘制,而动力(以千瓦为单位)沿着竖直轴(纵坐标)绘制。示出了三个示例特性或轨迹:第一轨迹132描绘车辆负载,第二轨迹134描绘电负载,以及第三轨迹136描绘联合收割机10的发动机
74的发动机动力输出。相比之下,图5中示出的依赖于时间的电池充电曲线图130同样沿着水平轴(横坐标)绘制从开始时间(t0)延伸到1200秒后的结束时间的同步时间段的时间。电池充电或放电(以kw/小时为单位)沿竖直轴绘制,其中单个轨迹138表示在所绘制的时间段内可再充电电池电源88的当前soc。在时间t0,由于联合收割机10的静态卸载,车辆负载(轨迹132)降低。出于本示例的目的,可以假设联合收割机卸载发生在大约120秒内。响应于联合收割机卸载的开始,控制器架构16将电驱动子系统72置于快速充电模式。因此,电负载(轨迹136)在这个时间段内增加,而发动机负载(轨迹134)方面几乎没有出现变化。在联合收割机卸载时段中,可再充电电池电源88的soc从初始最小的最佳soc(对应于图5中的竖直轴的零值)增加到最大的最佳soc(对应于图5中竖直轴的1值)。来自这个时间范围(t0至t120)的轨迹138的斜率基本上是恒定的,并且可以表示所选择的充电速率(r再充电),该充电速率足以将足够的动力存储返回到可再充电电池电源88,用于在随后的主动收割时段期间放电,如下所述。
51.接下来,从时间段t120至t900开始发生箱填装阶段。在这个时间段期间,联合收割机10进行两次主动收割遍次(在时间段t120至t500和时间段t520至t900内发生)和主动收割遍次之间的非收割端转弯(在时间段t500至t520期间发生)。如图4中的轨迹132所示,车辆负载(轨迹132)因此在主动收割遍次期间增加(t120至t500和t520至t900);然而,如轨迹134所示,发动机74的发动机输出维持在基本恒定的带内(在本例中通常在50和55kw之间)。这是由于在这些时间段中的每一个时间段期间将电驱动子系统72置于动力辅助模式,如图4和图5中分别示出的轨迹136、138所指示。参照图5中的轨迹138,特别地,电驱动子系统72能够提供足以将发动机输出维持在基本恒定的动力输出范围内的这样的动力辅助,同时以受控的放电速率(r
放电
)缓慢地使可再充电电池电源88放电。在这个示例中,控制器架构16将放电速率(r
放电
)维持处于基本恒定的值,该值(作为绝对值)小于快速再充电速率(r
再充电
);例如,在实施例中,快速再充电速率(r
再充电
)大于并且可以是放电速率(r
放电
)的绝对最大值的至少两倍。
52.在图4和图5中绘制的示例场景中,联合收割机10能够在主动收割的所示的时段(在此,总共760秒)内在最初为空时填装粮箱54。因此,通过以上述方式控制放电速率(r
放电
)以在主动收割遍次(t120至t500和t520至t900)上,以及特别是在联合收割机10填装粮箱54通常所需的时间段内逐渐降低可再充电电池电源88的电量,智能混合动力传动系统12可以确保联合收割机10需要在可再充电电池电源88耗尽(或至少耗用到最小的光学soc阈值)的时刻之前对粮箱54进行卸载,从而为电驱动子系统72提供在随后的低动力(例如静态)卸载阶段期间再次对可再充电电池电源88充电的新机会。附加地,如图4和图5所示,在时间段t500至t520内,可以利用车辆负载暂时降低的机会(在此,由于联合收割机10的非收割转弯)来进一步对可再充电电池电源88充电。借助于这种混合动力充电管理方案,并且如图4和图5中时间t900和之后的新的混合联合收割机动力管理循环的开始所指示的那样,智能混合动力传动系统12可以在基本无限的基础上重复上述循环,以在联合收割机操作的联合收割机收割循环阶段的箱填装阶段期间可靠地辅助发动机74。这不仅允许小型化发动机74,而且通过将发动机输出稳定在涵括或至少接近发动机74以最大效率水平操作的动力输出(和速度范围)的窄带(轨迹134)中进一步优化了发动机操作。
53.在上述示例中,智能混合动力传动系统12被描述为当电驱动子系统72在动力辅助
模式下操作时以基本恒定的速率使可再充电电池电源88放电。虽然在某些情况下可能是这种情况,但是在另外的实施例中,智能混合动力传动系统12的控制器架构16可以有利地改变马达/发电机82的机械动力输出,并因此改变可再充电电池电源88放电的速率。例如,考虑图6中示出并绘制了多个扭矩曲线(由不同的线图案标识,如键值142所示)的示例曲线图140。所描绘的扭矩曲线可以存储在控制器架构16可访问的存储器(例如,图2中示出的存储器102)中,其中每个扭矩曲线被分配给可再充电电池电源88的不同soc范围。当在动力辅助模式下操作时,控制器架构16可以首先确定可再充电电池电源88的当前soc,并且然后选择相对应的扭矩曲线用于针对发动机输出轴94的给定旋转速率(沿曲线图140的水平轴绘制)确定马达/发电机82的目标动力输出(沿曲线图140的竖直轴绘制),如利用旋转速率传感器98监测的那样。
54.如图6所示,最上面的扭矩曲线144可以对应于可再充电电池电源88的相对较大的soc范围(在此,从最佳soc范围的25%到100%);并且因此表示优选地在联合收割机操作期间遵循的扭矩曲线。最高扭矩曲线144下方的剩余扭矩曲线提供逐渐降低(以步进的方式)的马达/发电机输出水平,以在当前soc降低到下限阈值以下(在此为25%以下)时转换可再充电电池电源88内的能量存储,同时仍然保持操作员熟悉的扭矩曲线形状。以这样的方式,控制器架构16可以结合可再充电电池电源88的当前soc方面的变化在所示的扭矩曲线之间主动切换,以更有效地保存或管理存储在可再充电电池电源88内的能量,同时根据操作员期望更好地维持联合收割机10的性能参数。
55.如以上结合图3所讨论的那样,智能混合动力传动系统12的实施例可以进一步执行方法以大体上将可再充电电池电源88的soc维持在最佳范围内。接下来参考图7,这样的最佳soc范围的示例沿着曲线图146的右竖直轴绘制,并且其范围从最小的最佳soc阈值(对应于0%的值,如虚线148所标记)到最大的最佳soc阈值(对应于100%的值,如虚线150所标记)。如通过将沿着曲线图146的右竖直轴绘制的最佳soc范围与沿着曲线图146的左竖直轴绘制的总电池容量进行比较可以理解的那样,最佳soc范围通常将明显小于可再充电电池电源88的总电池容量。在不太复杂的实施例中,智能混合动力传动系统12的控制器架构16可以在操作期间监测可再充电电池电源88的当前soc,并执行以下动作中的一个或两个:(i)当当前soc达到最大的最佳soc阈值(线150)时,阻止(防止或显著减少)可再充电电池电源88的进一步充电,以及(ii)当当前soc达到最小的最佳soc阈值148时,阻止可再充电电池电源88的进一步放电,而与粮箱54的当前填装水平无关。在其他情况下,控制器架构16可以替代地利用可变或动态soc最低值(在图7中由标记152表示)来阻止可再充电电池电源88的进一步放电,如下所述。
56.当被提供时,基于从存储器102调用的参数并与粮箱54的当前填装水平方面的变化相关,由控制器架构16有效地移动动态soc最低值(标记152)。在示出的示例中,动态soc最低值(标记152)遵循从在0%的箱填装水平处出现的第一点(在粮箱54内留下100%的可用容量)延伸到在100%的箱填装水平处出现的第二点(在粮箱54内留下0%的可用容量)的基本上线性的路径158。因此,在0%的箱填装(粮箱54的100%可用容量)下,控制器架构16有效地移动可变soc最低值(152)以被移动到与点154一致的位置,并且当可再充电电池电源88的当前soc达到由线160指示的水平时,防止(或至少阻止)附加电池放电。这确保了在可再充电电池电源88中维持足够的动力储备,以完成混合联合收割机动力管理循环的收割
阶段。因此,在这种情况下,控制器架构16可以停止执行(或至少大大减少)任何非收割动力辅助功能。值得注意的是,并且如图7中双箭头162所示,可以在对应于线160的动态soc最低值(标记152)的最大值和最大的最佳soc阈值(线150)之间在可再充电电池电源88内提供附加存储容量。因此,可再充电电池电源88可以在这个带内存储和放电能量,以提供与非收割动作或事件相关联的上述动力辅助功能,诸如帮助更好地将发动机动力输出维持在最佳等时范围内、在瞬态重发动机负载状况期间有助于进行负载分担、以及在分离器滚筒的初始起动期间提供临时动力提升,仅举几个示例。
57.如上所述,控制器架构16从存储器102中调用来自可变soc最低值152的参数,基于当前可用的箱填装水平主动调节可变soc最低值152的位置,并调节可再充电电池电源88的放电,以在可再充电电池电源88的当前soc达到(或接近)soc最低值152时阻止(防止或显著减少)电池放电。例如,在其中联合收割机10的粮箱54是半满的场景下(由图7中的竖直线164表示),当可再充电电池电源88的当前soc达到soc最低值(标记152)的当前位置时,控制器架构16将阻止进一步的电池放电,如图7中的水平线166所指示。以这样的方式,通常可以确保在可再充电电池电源88中保存足够的能量存储,以完成当前的箱填装阶段并完成粮箱54的填装。最后,如曲线图146的右下部上所示,可变soc最低值152可以终止于或略高于可再充电电池电源88的最小的最佳soc阈值(线148),因为当粮箱54处于100%的填装水平(0%的可用箱容量)时在最佳soc范围内允许可再充电电池电源88的完全耗用,假如在卸载收集在粮箱54内的散装谷物之前主动收割不能继续的情况下,将电驱动子系统72置于快速充电模式,并且相对应的电池再充电到足以重复上述方法的水平(如果不是达到可再充电电池电源88的最大的最佳soc(线150)的话)。
58.智能混合动力传动系统12的实施例还可以在位于联合收割机10的驾驶室22中的显示设备24上生成各种图形用户界面(gui)屏幕或页面。这种gui屏幕可以包括图形(文本读数、符号、虚拟仪表等),为联合收割机10的操作员提供智能混合动力传动系统12的操作参数或状态的视觉感知。在这点上,考虑图8和图9中示出的示例混合动力系状态图形168,在实施例中,该图形可以由智能混合动力传动系统12在显示设备24上生成,以使操作员能够辨别可再充电电池电源88的当前soc和瞬时发动机动力水平。为此,混合动力系状态图形168包括:指示发动机74的当前动力输出的虚拟仪表170;滑动标记172,其沿着虚拟仪表170竖直移动以大体上指示(例如,与数字读数一起)发动机输出轴94的当前旋转速度;以及soc图形174,其被分成可以被填充或以其他方式视觉区分的象限,以指示可再充电电池电源88的当前soc何时范围在最佳soc范围的0至25%、25至50%、50至75%或75至100%内。如图7和图8中由交叉影线所指示,当例如发动机动力输出相对较高或者可再充电电池电源88的当前soc相对较低时,可以应用颜色编码来利用视觉上冲击的颜色(例如,红色或黄色)填充混合动力系状态图形168的某些单元或区域。最后,箭头路径图形176、178提供直观的视觉指示,所述直观的视觉指示传达电驱动子系统72当前被置于快速充电模式(如图8中通过视觉填充指示从发动机74到可再充电电池电源88的动力流的下部箭头路径图形176指示的那样)还是电驱动子系统72当前在动力辅助模式下操作(如通过填充指示从电驱动子系统到发动机74的动力流的上部箭头路径图形178所指示的那样)。
59.智能混合动力传动系统的列举示例
60.为了便于参考,进一步提供了智能混合动力传动系统的以下示例并对其进行了编
号。
61.1.在第一示例性实施例中,一种智能混合动力传动系统的实施例包括:发动机,该发动机被配置成产生用于为联合收割机的推进和粮箱卸载功能提供动力的发动机动力输出;控制器架构;以及电驱动子系统。电驱动子系统又包括电池电源和马达/发电机,该马达/发电机被配置为选择性地由电池电源供应动力以补充由发动机动力输出、或者由发动机供应动力以对电池电源充电。在耦接到电池电源和发动机的情况下,控制器架构被配置成:(i)当联合收割机进入具有箱填装阶段和箱卸载阶段的联合收割机收割循环时,监测电池电源的当前充电状态(state of charge,soc);(ii)在箱填装阶段期间,操作马达/发电机以补充发动机动力输出并调节电池放电的速率,以防止在箱填装阶段完成之前电池电源的当前soc降低到预定soc下限阈值以下;以及(iii)在箱卸载阶段,操作马达/发电机以对电池电源充电,直到电池电源的当前soc等于或大于第一预定soc上限阈值,从而使得联合收割机收割循环能够重复。
62.2.根据示例1的智能混合动力传动系统,其中控制器架构还被配置成在联合收割机在作物田地上行驶时当联合收割机在收割遍次之间进行非收割转弯时操作马达/发电机以对电池电源充电。
63.3.根据示例1的智能混合动力传动系统,其中控制器架构还被配置为当检测到在期间发动机被置于小于下限发动机负载阈值的降低的负载下的瞬态轻负载状况时操作马达/发电机以对电池电源充电。
64.4.根据示例1的智能混合动力传动系统,其中控制器架构被配置为当检测到在期间发动机被置于比下限发动机负载阈值大的降低的负载下的瞬态轻负载状况时操作马达/发电机以补充发动机动力输出,同时限制电池放电以确保足够的存储能量储备来完成联合收割机收割循环的当前箱卸载阶段。
65.5.根据示例1的智能混合动力传动系统,其中联合收割机包括分离器滚筒。控制器架构被配置成操作马达/发电机以在分离器滚筒的旋转起动期间补充发动机动力输出,同时限制电池放电以确保足够的存储能量储备来完成联合收割机收割循环的当前箱卸载阶段。
66.6.根据示例1的智能混合动力传动系统,还包括存储各自与电池电源的不同soc范围相关联的多个扭矩曲线的存储器。控制器架构耦接到存储器,并且被配置成:(i)从多个扭矩曲线中选择对应于可再充电电池电源的当前soc的扭矩曲线;以及(ii)控制马达/发电机,使得马达/发电机和发动机的累积动力输出在联合收割机收割循环的箱填装阶段期间基本上遵循所选择的扭矩曲线。
67.7.根据示例1的智能混合动力传动系统,还包括旋转速率传感器,该旋转速率传感器被配置为提供指示发动机的发动机轴速度的数据。控制器架构被耦接到旋转速率传感器,并且还被配置成:(i)如果在联合收割机收割循环期间超过上限速度阈值,则操作马达/发电机以降低发动机轴速度;以及(ii)如果在联合收割机收割循环期间下降到下限速度阈值以下,则操作马达/发电机以加速发动机轴速度。
68.8.根据示例7的智能混合动力传动系统,其中当操作马达/发电机以降低发动机轴速度时,控制器架构还被配置为当电池电源的当前soc达到大于第一预定上限阈值的第二预定上限阈值时,结合马达/发电机的反向驱动阻止电池电源的充电。
69.9.根据示例1的智能混合动力传动系统,其中控制器架构还被配置为当电池电源的当前soc达到大于第一预定soc上限阈值的第二上限预定阈值时,在箱卸载阶段期间阻止电池电源的充电。
70.10.根据示例9的智能混合动力传动系统,还包括电耦接在马达/发电机和电池电源之间的能量耗散机构。控制器架构被配置成当电池电源的当前soc达到第二预定上限阈值时,激活能量耗散机构以阻止在箱卸载阶段期间对电池电源的充电。
71.11.根据示例1的智能混合动力传动系统,其中在箱卸载阶段期间,控制器架构被配置为操作马达/发电机以具有比箱填装阶段期间电池放电的速率的最大值大的绝对值的再充电速率对电池电源充电。
72.12.根据示例1的智能混合动力传动系统,还包括存储动态soc最低值的存储器,以及集成到联合收割机中并被配置为提供指示粮箱的填装水平的数据的机载传感器。在耦接到存储器和耦接到机载传感器的情况下,控制器架构还被配置成:(i)基于由联合收割机收割循环的机载传感器所指示的粮箱的填装水平调节动态soc最低值的定位;以及(ii)在联合收割机收割循环的箱填装阶段期间,当可再充电电池电源的当前soc达到动态soc最低值时,阻止电池电源的进一步放电。
73.13.根据示例1的智能混合动力传动系统,其中控制器架构被配置为在联合收割机的地面速度小于每小时一英里的同时,在箱卸载阶段期间操作马达/发电机对电池电源充电。
74.14.在另外的示例实施例中,智能混合动力传动系统包括:发动机,该发动机被配置为产生用于为联合收割机的推进和粮箱卸载功能提供动力的发动机动力输出;机载传感器,该机载传感器被配置为提供指示粮箱的填装水平的数据;以及电驱动子系统,该电驱动子系统具有电池电源和马达/发电机,该马达/发电机由电池电源供应动力以补充发动机动力输出或由发动机供应动力以对电池电源充电。控制器架构耦接到机载传感器和耦接到电驱动子系统。控制器架构被配置成:(i)当联合收割机进入具有箱填装阶段和箱卸载阶段的联合收割机收割循环时,监测电池电源的当前充电状态(soc);(ii)在箱填装阶段期间,操作马达/发电机以补充发动机动力输出,并调节电池电源的放电的速率,以将当前soc维持处于动态soc最低值或以上,该动态soc最低值具有与粮箱的当前填装水平相关地变化的值;以及(iii)在箱卸载阶段期间,操作马达/发电机以对电池电源充电。
75.15.根据示例14的智能混合动力传动系统,其中联合收割机包括分离器滚筒。控制器架构被配置成在分离器滚筒的旋转起动期间操作马达/发电机以补充发动机动力输出,同时限制电池放电以将当前soc维持处于动态soc最低值或以上。
76.结论
77.因此,已经提供了用于在联合收割机上使用的智能混合动力传动系统的实施例。智能混合动力传动系统的实施例策略性地确定何时将电驱动系统置于动力辅助模式或快速充电模式,以优化联合收割机性能的各个方面,同时使得内燃发动机小型化能够提供燃料经济性方面的增强、降低的排放、成本节约和其他益处。在联合收割机收割循环的箱填装阶段期间,通过动力辅助模式的策略性应用来解决动力限制问题;并且,具体而言,通过以受控速率(可变或非可变)对可再充电电池电源放电来驱动马达/发电机,并且在操作的这个阶段期间补充发动机的动力输出。在实施例中,控制可再充电电池电源放电的速率,以确
保在每个粮箱填装阶段的整个持续时间内的足够的动力供应。随后,在从联合收割机低动力(例如,低速或静态)卸载散装谷物期间,控制器架构将电驱动子系统切换到快速充电模式,以利用联合收割机的相对较低的动力输出需求,并将可再充电电池电源快速再充电到足以重复上述过程的水平。一般而言,混合动力传动系统的实施例然后在电池充电和放电之间智能切换,以在轻负载状况下实现能量存储,其中然后利用所存储的能量来辅助在电池存储能量和耐久性极限内实施每个收割循环。如上所述,由智能混合动力传动系统的实施例还实现了各种其他益处。
78.如本文所用,单数形式的“一”、“一个”和“该”旨在也包括复数形式,除非上下文清楚地另外指出。还应当理解的是,当在本说明书中使用时,术语“包括和/或包含(comprises和/或comprising)”指定所陈述的特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或多个其他特征、整数、步骤、操作、元件、部件和/或它们的组的存在或添加。
79.本公开的描述已经出于说明和描述的目的进行了呈现,但是并不旨在穷举或限于呈所公开形式的公开内容。在不脱离本公开的范围和精神的情况下,许多修改和变化对于本领域普通技术人员来说是显而易见的。选择和描述本文明确引用的实施例是为了最好地解释本公开的原理及其实际应用,并使得本领域的其他普通技术人员能够理解本公开内容并认识到所描述的(多个)示例的许多替代性方案、修改和变化。因此,除了那些明确描述的实施例和实施方式之外的各种实施例和实施方式都在所附权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1