一种电动果实采摘机
1.本发明涉及果实采摘技术领域,尤其涉及一种电动果实采摘机。
背景技术:
2.现有研发的电动果实采摘机,其抓握结构产生的夹持力度的大小无法做到精准控制,当果实的大小发生变化时,其夹持力度是不变的,容易对果实产生损伤,无法满足现有的果实采摘需求。
技术实现要素:
3.技术问题是针对上述现有技术的不足,本发明提供一种电动果实采摘机。
4.为解决上述技术问题,本发明所采取的技术方案是:一种电动果实采摘机,包括手柄、动力传动系统、力的调整机构、传动杆(15)、抓握结构;
5.所述手柄为中空长杆,在手持端设置两个用于控制电机正、反运转的控制按钮;
6.所述动力传动系统:包括电机、摩擦轮和摩擦传动片;
7.所述电机输出端上设置摩擦轮,所述摩擦轮的边缘深入到手柄的开口中,与手柄中的摩擦传动片之间具备接触压力;
8.所述传动杆与摩擦传动片在手柄中轴向固定连接,摩擦传动片和传动杆在手柄中具有轴向自由度;
9.所述力的调整机构:包括固定座、活动支撑杆、支撑螺钉;
10.所述固定座固定连接在传动杆上,固定座的中间位置设置用于调节作用在摩擦传动片上的正压力的活动支撑杆;
11.所述固定座限制活动支撑杆在手柄中的轴向自由度;
12.所述支撑螺钉与手柄螺纹连接,控制活动支撑杆在手柄中的径向位置;
13.进一步的,所述动力传动系统还包括对电机的转速进行调节的电气调速模块。
14.进一步的,当所述电气调速模块用机械减速器来代替时,所述摩擦轮安装于机械减速器的输出端。
15.进一步的,所述动力传动系统中的机械减速器通过机架固定安装在手柄加固套上,所述手柄加固套固定安装在手柄上。
16.进一步的,所述抓握结构包括活动爪、三夹爪和支杆;
17.所述支杆一端与手柄为固定角度的连接,支杆另一端与三夹爪活动连接;所述传动杆与活动爪固定连接。
18.进一步的,所述三夹爪与果实的接触面安装有防护垫。
19.进一步的,所述手柄位于抓握结构侧的端口设置用于固定滑套的固定帽。
20.采用上述技术方案所产生的有益效果在于:
21.1、本发明提供的电动果实采摘机结构相对简单、手持式采摘使用方便,具有很好的实用性和经济性。
22.2、本发明利用摩擦原理,通过调节摩擦力的大小实现果实夹持力的调节,来达到果实夹持力可控的技术效果。
23.3、本发明使采摘果实损伤率降低,果实损伤率趋近于零,提高果农的收入和经济效益。
附图说明
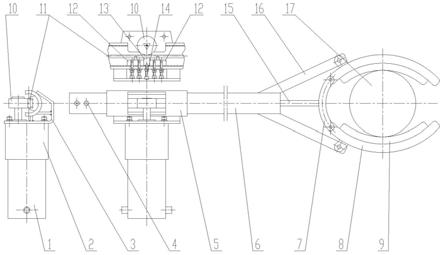
24.图1为本发明实施例中提供的电动果实采摘机的整体结构示意图;
25.图2为本发明实施例中动力传动系统和力的调整机构的部分结构示意图;
26.其中,1
‑
电机,2
‑
减速器,3
‑
机架,4
‑
控制开关,5
‑
手柄加固套,6
‑
手柄,7
‑
活动爪,8
‑
三夹爪,9
‑
防护垫,10
‑
橡胶摩擦轮,11
‑
摩擦传动片,12
‑
固定座,13
‑
活动支撑杆,14
‑
支撑螺钉,15
‑
传动杆,16
‑
支杆,17
‑
果实,18
‑
固定帽,19
‑
滑套。
具体实施方式
27.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
28.如图1所示,本实施例中电动果实采摘机如下所述。
29.电动果实采摘机,包括手柄(6)、动力传动系统、力的调整机构、传动杆(15)、抓握结构;
30.所述手柄(6)为中空长杆,在手持端设置两个用于控制电机(1)正、反运转的控制按钮(4);
31.所述动力传动系统:包括电机(1)、摩擦轮(10)和摩擦传动片(11);
32.所述电机(1)输出端上设置摩擦轮(10),所述摩擦轮(10)的边缘深入到手柄(6)的开口中,与手柄(6)中的摩擦传动片(11)之间具备接触压力;
33.所述传动杆(15)与摩擦传动片(11)在手柄(6)中轴向固定连接,摩擦传动片(11)和传动杆(15)在手柄(6)中具有轴向自由度;
34.所述力的调整机构:包括固定座(12)、活动支撑杆(13)、支撑螺钉(14);
35.所述固定座(12)固定连接在传动杆(15)上,固定座(12)的中间位置设置用于调节作用在摩擦传动片(11)上的正压力的活动支撑杆(13);
36.所述固定座(12)限制活动支撑杆(13)在手柄(6)中的轴向自由度;
37.所述支撑螺钉(14)与手柄(6)螺纹连接,控制活动支撑杆(13)在手柄(6)中的径向位置;
38.本实施例中,动力传动系统和力的调整机构的部分结构如图2所示。通过旋转支撑螺钉(14),在螺纹作用下推动活动支撑杆(13)在手柄(6)中径向移动,来调节摩擦轮(10)与摩擦传动片(11)之间的接触压力,从而将外力转化为作用在摩擦传动片(11)上的正压力;当摩擦轮(10)在电机(1)的控制下发生正、反转动时,在摩擦力的作用下,带动摩擦传动片(11)在手柄(6)中轴向来回的直线移动,从而实现抓握结构对果实的抓取与松开。
39.进一步的,所述动力传动系统还包括对电机(1)的转速进行调节的电气调速模块。
40.进一步的,当所述电气调速模块用机械减速器(2)来代替时,所述摩擦轮(10)安装于机械减速器(2)的输出端。
41.进一步的,所述动力传动系统中的机械减速器(2)通过机架(3)固定安装在手柄加固套(5)上,所述手柄加固套(5)固定安装在手柄(6)上。注意安装时使连接在机械减速器(2)上的摩擦轮(10)与手柄(6)中的摩擦传动片(11)之间产生压力。
42.进一步的,所述抓握结构包括活动爪(7)、三夹爪(8)和支杆(16);
43.所述支杆(16)一端与手柄(6)为固定角度的连接,支杆(16)另一端与三夹爪(8)活动连接;所述传动杆(15)与活动爪(7)固定连接。传动杆(15)在手柄(6)中轴向前后往复移动,实现三夹爪(8)张开不同的角度。
44.进一步的,所述三夹爪(8)与果实的接触面安装有防护垫(9)。防止在抓握结构中对果实造成损伤。
45.进一步的,所述手柄(6)位于抓握结构侧的端口设置用于固定滑套(19)的固定帽(18)。滑套(19)对穿出的传动杆(15)在手柄(6)中的径向位置进行限定,对轴向位置不做限制。
46.本实施例中,在使用本实施例所述的果实采摘机时,先按下控制按钮(4)使电机(1)转动并通过机械减速器(2)减小转速,然后带动摩擦轮(10)转动,在摩擦力的作用下,摩擦轮(10)带动摩擦传动片(11)在手柄(6)中轴向移动,从而带动连接在上面的传动杆(15)在手柄(6)中轴向移动,三夹爪(8)在传动杆(15)移动的过程中张开不同的角度,使果实置于三夹爪(8)中,接着按下另一个控制按钮(4)使电机(1)向另一个方向转动,从而实现传动杆(15)发生反向移动,三夹爪(8)合拢,抓住了置于其中的果实。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1