一种蔬菜嫁接中的自动贴接方法及装置与流程
1.本发明属于蔬菜嫁接技术领域,特别是涉及一种蔬菜嫁接中的自动贴接方法及装置。
背景技术:
2.贴接嫁接方式中,分别对砧木以及穗苗的胚轴进行斜切,最后将这两个斜切面在空间进行对齐包扎,实现嫁接过程。这两个斜切面在理论上进行对齐时,一共需要如下5个自由度:上下方向的自由度、水平方向的自由度、错开方向的自由度和切割面平行度的两维自由度。完整实现上述5个自由度的设计,一定可以实现斜切的两个切面的理论的平行重合,但是在工程实施的过程中,也可以简化一些,实现一部分的自由度的控制,最终也实现工程上两个斜切面的贴合。
3.而现实中嫁接设备大多,没有实现5个自由度中的任一一个自由度的控制,也实现了两个斜切面的贴合,完全是依靠机械的装配来保证两个斜切面的空间对齐。设计的优点是成本极低,但是设备的缺点也是贴接的精度不高。最终的结果是嫁接苗的成活率不高。
技术实现要素:
4.本发明的目的在于提供一种蔬菜嫁接中的自动贴接方法及装置,通过两个自由度可控制的方法,实现了贴接嫁接的两个斜切面的贴合,解决了现有的贴接精度不高、嫁接苗的成活率不高的问题。
5.为解决上述技术问题,本发明是通过以下技术方案实现的:
6.本发明为一种蔬菜嫁接中的自动贴接方法,包括如下步骤:
7.步骤s1:砧木机械手从砧木接料工位抓取砧木,旋转90
°
到达砧木切割工位,切割完成后旋转90
°
到达包扎工位;
8.步骤s2:穗苗机械手从穗苗接料工位抓取穗苗,旋转90
°
到达穗苗切割工位,切割完成后旋转90
°
到达包扎工位进行两个斜切面的对齐,对齐后进行包扎;
9.其中,砧木和穗苗的两个斜切面对齐流程如下:
10.步骤q1:砧木相机拍摄砧木斜切面,识别图像中的切割上点p0和切割下点p1;
11.步骤q2:识别p0点在图像中y轴的位置;
12.步骤q3:穗苗相机拍摄穗苗斜切面,识别图像中的切割上点r0;
13.步骤q4:识别r0点在穗苗图像中的y轴位置;
14.步骤q5:确定两个斜切面在p0以及r0点的高度,控制砧木机械手上下运动的自由度,实现两个斜切面在竖直方向上的重合;
15.步骤q6:计算p0以及r0点在图像中x轴的位置,控制穗苗机械手的伸缩运动,实现两个斜切面在水平方向上的重合;
16.步骤q7:砧木和穗苗的两个斜切面对齐后,进行包扎处理。
17.作为一种优选的技术方案,所述步骤s1中,贴接开始前,先将砧木接料工位、包扎
工位和穗苗接料工位调节至同一条直线上。
18.作为一种优选的技术方案,所述步骤q1中,识别图像中的切割点,具体步骤如下:
19.步骤p1:canny算法对砧木图像进行边缘检测,获取右侧边缘像素点;
20.步骤p2:轮廓跟踪法获取右侧边缘位置的边缘像素点链码;
21.步骤p3:通过链码识别角点;
22.步骤p4:通过切割尺寸识别po点;
23.步骤p5:相同方法识别p1和r0点。
24.作为一种优选的技术方案,所述步骤p1中,对砧木图像进行边缘检测前,需要对砧木图像进行预处理获取边缘图像,具体预处理步骤如下:
25.步骤y1:输入砧木图像;
26.步骤y2:通过高斯滤波器进行降噪、平滑处理;
27.步骤y3:采用微分法计算梯度幅值和方向;
28.步骤y4:对平滑后的图像进行非极大值抑制,以获得定位准确的单边缘图像;
29.步骤y5:滞后阈值通过canny算法获取更多边界细节;
30.步骤y6:获得边缘图像。
31.作为一种优选的技术方案,所述步骤p2中,边缘像素点链码采用8
‑
邻接链码,具体步骤如下:
32.步骤l1:分轮廓搜索:找到图像最左上角的一个边界轮廓点x0点作为搜索起点,并以链码值dir=0为最开始搜索方向;
33.步骤l2:按八邻域的逆时针方向搜索起点的下一个点,每次搜索一次链吗值方向逆时针旋转45
°
,即dir+1;
34.步骤l3:若搜索到新的边界点,将该链码值赋值给它前一个点x1‑
1的方向,并以此点为八邻域的中心点,链码值方向顺时针旋转90
°
,即dir
‑
2作为该点的开始搜索方向,继续搜索;
35.步骤l4:重复步骤l2
‑
步骤l3,直至搜索到起点x0整个轮廓搜索完毕。
36.作为一种优选的技术方案,所述步骤p3中,通过链码识别角点的具体步骤如下:
37.步骤m1:根据图像轮廓点的链码,求出该轮廓所有点的链码差;
38.步骤m2:对于凸起或者凹陷处轮廓点进行链码修复;
39.步骤m3:分析链码发生变化的点的周围多个链码;
40.若两个点的链码差为1,则表示夹角为锐角45
°
;两个点的链码差为2,则表示夹角为直角90
°
;若两个点的链码差为3,则表示夹角为钝角135
°
,则该轮廓点为角点;若两个点的链码差为4,则表示夹角为直线180
°
。
41.本发明为一种蔬菜嫁接中的自动贴接装置,包括砧木切割装置、穗苗切割装置和嫁接夹;
42.所述砧木切割装置包括砧木机械手、砧木相机和砧木刀具;所述砧木机械手,用于从砧木接料工位夹取待嫁接的砧木;所述砧木机械手夹持待嫁接的砧木旋转90
°
至砧木切割工位,砧木刀具对砧木进行切割;所述砧木相机采集砧木斜切面图像,并识别砧木的切割点后,砧木机械手旋转90
°
至包扎工位;
43.所述穗苗切割装置包括穗苗机械手、穗苗相机和穗苗刀具;所述穗苗机械手,用于
从穗苗接料工位夹取待嫁接的穗苗;所述穗苗机械手夹持待嫁接的穗苗旋转90
°
至穗苗切割工位,穗苗刀具对穗苗进行切割;所述穗苗相机采集穗苗斜切面图像,并识别穗苗的切割点后,穗苗机械手旋转90
°
至包扎工位;
44.所述嫁接夹将两个斜切面空间对齐的嫁接砧木以及穗苗夹住固定。
45.作为一种优选的技术方案,所述砧木相机和穗苗相机正前方均设置有背景板;所述背景板,用于拍摄砧木和穗苗图像时的背景板。
46.本发明具有以下有益效果:
47.本发明通过拍摄砧木和穗苗上切割后的图片,识别出图像中切割点的位置,利用砧木机械手控制砧木上下运动的自由度和穗苗机械手控制穗苗的伸缩运动,实现两个斜切面在水平方向上的重合,提高嫁接时切割的精准度和嫁接后苗的成活率。
48.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
49.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
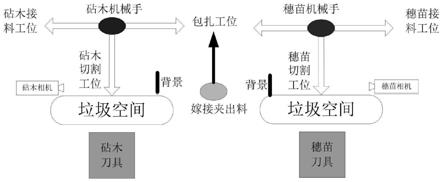
50.图1为一种蔬菜嫁接中的自动贴接装置的结构示意图;
51.图2为一种蔬菜嫁接中的自动贴接方法流程图;
52.图3为砧木和穗苗的两个斜切面对齐流程图;
53.图4为识别图像中的切割点的流程图;
54.图5为图像预处理的流程图;
55.图6为实施例二中,部分轮廓的8
‑
邻接链码。
具体实施方式
56.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
57.实施例一:
58.请参阅图2所示,本发明为一种蔬菜嫁接中的自动贴接方法,包括如下步骤:
59.步骤s1:砧木机械手从砧木接料工位抓取砧木,旋转90
°
到达砧木切割工位,切割完成后旋转90
°
到达包扎工位;
60.步骤s2:穗苗机械手从穗苗接料工位抓取穗苗,旋转90
°
到达穗苗切割工位,切割完成后旋转90
°
到达包扎工位进行两个斜切面的对齐,对齐后进行包扎;
61.为了实现包扎工位的两个斜切面的平行,在砧木刀具以及穗苗刀具的出刀方向上通过机械安装保证两个刀具的出刀面是完全平行的。在此两个斜切面平面的平行度的自由度不进行控制,而是由机械安装保证。
62.请参阅图3所示,砧木和穗苗的两个斜切面对齐流程如下:
63.步骤q1:砧木相机拍摄砧木斜切面,识别图像中的切割上点p0和切割下点p1;
64.步骤q2:识别p0点在图像中y轴的位置;
65.步骤q3:穗苗相机拍摄穗苗斜切面,识别图像中的切割上点r0;
66.步骤q4:识别r0点在穗苗图像中的y轴位置;
67.步骤q5:确定两个斜切面在p0以及r0点的高度,控制砧木机械手上下运动的自由度,实现两个斜切面在竖直方向上的重合;
68.步骤q6:计算p0以及r0点在图像中x轴的位置,控制穗苗机械手的伸缩运动,实现两个斜切面在水平方向上的重合;
69.步骤q7:砧木和穗苗的两个斜切面对齐后,进行包扎处理。
70.为了实现两个斜切面在水平方向上的重合,计算p0以及r0点在图像中x轴的位置,由此控制穗苗机械手的伸缩运动,实现两个斜切面在水平方向上的重合。为了实现两个斜切面在错开方向上的重合,在设备安装时保证下图三个红点在同一条直线上。由此,当砧木机械手与穗苗机械手旋转180度后,错开的方向在机械空间中是重合的。由上面的5个设计保证了理论上5维自由度的重合要求,其中包含2维可控制自由度,3维固定自由度,2维可控自由度的控制目标是实现上切割点的空间重合,最终实现了嫁接砧木以及穗苗的两个斜切面的空间对齐,当嫁接砧木以及穗苗的两个斜切面的空间对齐后,嫁接夹出料装置会通过嫁接夹夹住斜切面空间对齐的位置。
71.实施例二:
72.请参阅图4所示,步骤s1中,贴接开始前,先将砧木接料工位、包扎工位和穗苗接料工位调节至同一条直线上。
73.步骤q1中,识别图像中的切割点,具体步骤如下:
74.步骤p1:canny算法对砧木图像进行边缘检测,获取右侧边缘像素点;
75.步骤p2:轮廓跟踪法获取右侧边缘位置的边缘像素点链码;
76.步骤p3:通过链码识别角点;
77.步骤p4:通过切割尺寸识别po点;
78.步骤p5:相同方法识别p1和r0点。
79.请参阅图5所示,步骤p1中,对砧木图像进行边缘检测前,需要对砧木图像进行预处理获取边缘图像,具体预处理步骤如下:
80.步骤y1:输入砧木图像;
81.步骤y2:通过高斯滤波器进行降噪、平滑处理;
82.步骤y3:采用微分法计算梯度幅值和方向;
83.步骤y4:对平滑后的图像进行非极大值抑制,以获得定位准确的单边缘图像;
84.步骤y5:滞后阈值通过canny算法获取更多边界细节;
85.步骤y6:获得边缘图像。
86.请参阅图6所示,步骤p2中,边缘像素点链码采用8
‑
邻接链码,具体步骤如下:
87.步骤l1:分轮廓搜索:找到图像最左上角的一个边界轮廓点x0点作为搜索起点,并以链码值dir=0为最开始搜索方向;
88.步骤l2:按八邻域的逆时针方向搜索起点的下一个点,每次搜索一次链吗值方向逆时针旋转45
°
,即dir+1;
89.步骤l3:若搜索到新的边界点,将该链码值赋值给它前一个点x1‑
1的方向,并以此点为八邻域的中心点,链码值方向顺时针旋转90
°
,即dir
‑
2作为该点的开始搜索方向,继续搜索;
90.如图6(a)为4
‑
邻接链码示意图;图6(b)为8
‑
邻接链码示意图;
91.图6(c)为某段轮廓的8
‑
邻接链码图,该图6(c)中,链码为6
‑
>0
‑
>0
‑
>0
‑
>0
‑
>1
‑
>2
‑
>4
‑
>3。
92.步骤l4:重复步骤l2
‑
步骤l3,直至搜索到起点x0整个轮廓搜索完毕。
93.步骤p3中,通过链码识别角点的具体步骤如下:
94.步骤m1:根据图像轮廓点的链码,求出该轮廓所有点的链码差;
95.步骤m2:对于凸起或者凹陷处轮廓点进行链码修复;
96.步骤m3:分析链码发生变化的点的周围多个链码;
97.若两个点的链码差为1,则表示夹角为锐角45
°
;两个点的链码差为2,则表示夹角为直角90
°
;若两个点的链码差为3,则表示夹角为钝角135
°
,则该轮廓点为角点;若两个点的链码差为4,则表示夹角为直线180
°
。
98.实施例三:
99.请参阅图1所示,本发明为一种蔬菜嫁接中的自动贴接装置,包括砧木切割装置、穗苗切割装置和嫁接夹;
100.砧木切割装置包括砧木机械手、砧木相机和砧木刀具;砧木机械手,用于从砧木接料工位夹取待嫁接的砧木;砧木机械手夹持待嫁接的砧木旋转90
°
至砧木切割工位,砧木刀具对砧木进行切割;砧木相机采集砧木斜切面图像,并识别砧木的切割点后,砧木机械手旋转90
°
至包扎工位;
101.穗苗切割装置包括穗苗机械手、穗苗相机和穗苗刀具;穗苗机械手,用于从穗苗接料工位夹取待嫁接的穗苗;穗苗机械手夹持待嫁接的穗苗旋转90
°
至穗苗切割工位,穗苗刀具对穗苗进行切割;穗苗相机采集穗苗斜切面图像,并识别穗苗的切割点后,穗苗机械手旋转90
°
至包扎工位;
102.嫁接夹将两个斜切面空间对齐的嫁接砧木以及穗苗夹住固定。
103.砧木相机和穗苗相机正前方均设置有背景板;背景板,用于拍摄砧木和穗苗图像时的背景板,由于背景板只有一个颜色,拍摄的图片只有砧木和穗苗的图像,方便去除背景对图像进行处理,提高图像识别的准确率和识别效率。
104.实施例四:
105.上述实施例中采用的定位方法为上切割点定位方法,但本技术文件中该装置使用自动贴接的定位方法包括但不限于:上切割点定位、下切割点定位、切割面中心点定位或其他参照点定位。
106.值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
107.另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
108.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1