一种用于花朵采摘的智能辅助设备的制作方法
1.本发明涉及农具技术领域,更具体的说,本发明涉及一种用于花朵采摘的智能辅助设备。
背景技术:
2.随着科技水平的发展,在农业的生产中,自动化、机械化是重要的一环,目前,在花朵收获的季节,大多采用人工进行采摘,人工采摘的效率非常低,劳动强大,而随着现代农具化不断的发展,机械采摘对于一些一次性种植物来说是可以的,而对于一些能够常年采摘的植物,在采摘时不能伤其根茎,不然会造成种植上的巨大损失,而现有的机械采摘容易对花朵的根茎以及未开的花骨朵进行误伤、误割,因此,目前采用的花朵采摘机械不能满足现代化农业的发展。
技术实现要素:
3.本发明旨在于解决现有技术中机械采摘容易对花朵的根茎以及未开的花骨朵进行误伤、误割的技术问题。
4.本发明的目的与功效,由以下具体技术手段所达成:一种用于花朵采摘的智能辅助设备,包括移动支座,移动底座上端中心两侧转动设置有收割架,收割架内相邻一侧均设有采摘组件,且采摘组件贯穿至收割架的外侧,收割架上端对应采摘组件设有图像采集设备,移动支座内部安装有图像比对设备、单片机控制器,移动支座内安装有供电设备;采摘组件包括转板、梳齿和切割片,转板转动设置于收割架内,转板外侧一端设有若干组梳齿,梳齿设为两根一组,梳齿之间间距可调节,同一组的梳齿相邻一侧均呈开口设置,且开口内侧通过第二转轴转动设置切割片,第二转轴上端设有齿轮,梳齿开口内固定有齿条,梳齿之间相互靠近运动时齿条驱动齿轮转动进而带动切割片往梳齿之间的间隙中心一侧转动;收割架内位于转板后侧设有传送带,收割架内位于传送带靠近移动支座中心一侧处设有导料斗,收割架外侧对应导料斗处安装有布袋支撑杆,布袋支撑杆上端设有夹持布袋的夹子。
5.优选的,收割架通过伸缩转轴转动设置在移动支座上端,伸缩转轴包括第一转轴和第一套筒,第一转轴与第一套筒插拔设置,第一转轴内部设有推动第一套筒伸缩的第一伸缩杆。
6.优选的,第一转轴转动设置在移动支座上端,且第一转轴下端贯穿至移动支座内部安装有扇形齿轮,两组收割架下端的扇形齿轮相互啮合,其中一侧的第一转轴连接旋转气缸。
7.优选的,移动支座上端通过阻尼转轴转动设置有伸缩夹持件,伸缩夹持件包括机械臂、第二套筒、夹板和螺栓,机械臂呈l状,机械臂竖直部分与第二套筒插拔设置,机械臂
内设有竖直推动第二套筒伸缩的第二伸缩杆,第二套筒外侧安装有l状的夹板,夹板与第二套筒外侧端面形成“冂”状,夹板外侧螺纹连接有螺栓。
8.优选的,梳齿弯折朝上设置,且梳齿弯折角度呈钝角设置。
9.优选的,切割片弯折设置,且弯折角度呈钝角,切割片相邻一侧上下错位设置。
10.优选的,转板内设有安装槽,安装槽上端等距设置有移动槽,移动槽内转动设置有丝杆,丝杆两端分别螺纹设置有移动块,丝杆转动时移动块相互靠近或相互远离,梳齿与移动块固定,安装槽内安装有驱动丝杆转动的正反电机,正反电机电性连接继电器开关。
11.优选的,第二转轴上端贯穿至梳齿上端连接有拨杆。
12.优选的,图像比对设备将花朵与花骨朵建立模型,图像采集设备与图像比对设备、单片机控制器通讯连接,单片机控制器正反电机的继电器开关。
13.优选的,同一组梳齿内安装的齿条相对设置,且位于齿轮两侧。
14.有益效果:1、伸缩转轴可以升降,并通过旋转气缸可以使得伸缩转轴旋转,进而带动切割架旋转,便于切割架张开工作或者折叠存放。
15.2、梳齿跟随移动支座往前移动的过程中对花朵茎杆处插入,通过电机带动转板往上抬动,将花朵纳入梳齿上端,通过图像采集、比对后,通过正反电机带动丝杆转动进而带动移动块相互靠近,然后通过移动块带动梳齿相互靠近,通过齿条带动齿轮转动进而带动切割刀相互靠近对花朵进行采摘,一次可以采摘更多的花朵,采摘效率高,同时可以保护花骨朵,伸缩转轴可以调节收割架的高度,转板可以调节梳齿的角度,不易损伤植物茎杆。
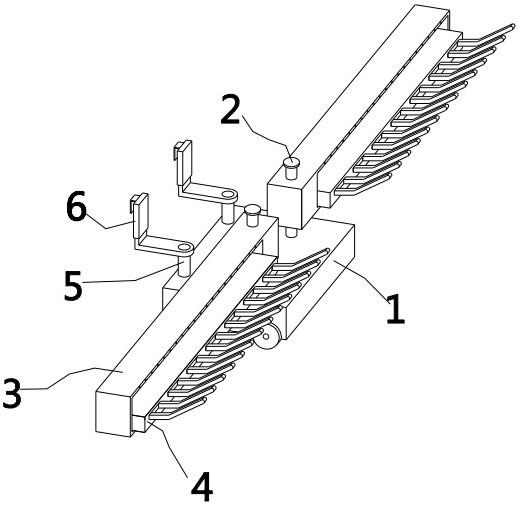
16.附图说明:图1为本发明的用于花朵采摘的智能辅助设备示意图。
17.图2为本发明的收割架示意图。
18.图3为本发明的收割架内部示意图。
19.图4为本发明的转板剖视示意图。
20.图5为本发明的梳齿内部示意图。
21.图6为本发明的移动支座内部示意图。
22.图7为本发明的伸缩夹持件剖视示意图。
23.图8为本发明的伸缩转轴剖视示意图。
24.图9为本发明的切割片结构示意图。
25.图10为本发明的实施例二花朵采摘的智能辅助设备示意图。
26.图1-10中:移动支座1、伸缩转轴2、第一转轴21、限位板211、第一滑槽212、第一套筒22、第一滑块221、第一伸缩杆23、收割架3、图像采集设备31、采摘组件4、转板41、安装槽411、移动槽412、丝杆413、正反电机414、梳齿42、移动块421、收纳槽422、第二转轴423、齿轮424、拨杆425、齿条426、切割片43、阻尼转轴5、伸缩夹持件6、机械臂61、第二滑槽611、第二伸缩杆612、第二套筒62、第二滑块621、夹板63、螺栓64、传送带7、导料斗8、布袋支撑杆9、辅助杆91、扇形齿轮10、绑带一11、绑带二12、调节扣121、卡腰口13。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.参照图1-10,一种用于花朵采摘的智能辅助设备,包括移动支座1,移动支座1底部转动设置滚轮,移动底座1上端中心位置的前后两侧通过伸缩转轴2转动设置有收割架3,收割架3绕伸缩转轴2转动至移动支座1右侧折叠,收割架3内部相邻一侧呈开口状,开口内均设有采摘组件4,且采摘组件4外侧贯穿至收割架3的外侧,采摘组件4包括转板41、梳齿42和切割片43,转板41转动设置于收割架3内,转板41外侧一端活动设置有若干组梳齿42,梳齿42设为两根一组,转板41内设有安装槽411,安装槽411上端等距设置有移动槽412,移动槽412内转动设置有丝杆413,丝杆413两端分别螺纹设置有移动块421,丝杆413转动时移动块421相互靠近或相互远离,梳齿42与移动块421固定,安装槽41内安装有驱动丝杆413转动的正反电机414,正反电机414与丝杆413通过锥形齿轮传动,正反电机414电性连接继电器开关,同一组的梳齿42相邻一侧均呈开口设置,且开口内侧通过第二转轴423转动设置切割片43,第二转轴423上端设有齿轮424,梳齿42开口内固定有齿条426,同一组梳齿42内安装的齿条426相对设置,且位于齿轮424两侧,在正反电机414带动丝杆413转动进而带动移动块421相互靠近时,移动块421则带动梳齿42之间相互靠近,则齿条426驱动齿轮424转动进而带动切割片423往梳齿42之间的间隙中心一侧转动;收割架3上端对应每组的梳齿42均安装有图像采集设备31,移动支座1内部安装有图像比对设备、单片机控制器,移动支座1内安装有供电设备;图像比对设备将花朵与花骨朵建立模型,图像采集设备31与图像比对设备、单片机控制器通讯连接,单片机控制器正反电机的继电器开关,图像采集设备31将每组梳齿42之间的花朵或花骨朵的图像上传与图像比对设备进行比对,当有花骨朵时,单片机控制器控制对应的正反电机414的继电器开关,进而防止将花骨朵剪下;收割架3内位于转板41后侧转动设置传送带7,传送带7由电机控制运行,收割架3内位于传送带7靠近移动支座1中心一侧处固定安装导料斗8,收割架3外侧对应导料斗8处安装有布袋支撑杆9,布袋支撑杆9上端设有夹持布袋的夹子,支撑杆9呈l状,支撑杆9位于导料斗8的下端连接有辅助杆91,辅助杆91与支撑杆9平行设置,且上端都安装有夹子,这样使得袋子的前后侧可以夹持在支撑杆9与辅助杆91上端,袋子的开口正对导料斗8的下方,便于收纳;梳齿42跟随移动支座1往前移动的过程中对花朵茎杆处插入,通过电机带动转板41往上抬动,将花朵纳入梳齿42上端,通过图像采集、比对后,通过正反电机414带动丝杆413转动进而带动移动块421相互靠近,然后通过移动块421带动梳齿42相互靠近,通过齿条426带动齿轮424转动进而带动切割刀43相互靠近对花朵进行采摘,一次可以采摘更多的花朵,采摘效率高,同时可以保护花骨朵,伸缩转轴2可以调节收割架3的高度,转板41可以调节梳齿42的角度,不易损伤植物茎杆。
29.其中,收割架3通过伸缩转轴2转动设置在移动支座1上端,伸缩转轴2包括第一转轴21和第一套筒22,第一转轴21上端套设有第一套筒22,第一转轴21两侧设有第一滑槽212,第一套筒22内部对应第一滑槽212固定有第一滑块221,第一滑块221滑动设置于第一滑槽212内,第一转轴21内部中心安装有竖直的第一伸缩杆23,第一伸缩杆23为液压缸,液压缸顶部与第一套筒22内顶部固定,第一套筒22顶部固定限位板211;通过液压缸顶动第一套筒22可以带动收割架3上升下降,调节高低方便,限位板211与收割架3之间连接加强筋,
提升整体稳定性,第一转轴21转动设置在移动支座1上端,且第一转轴21下端贯穿至移动支座1内部安装有扇形齿轮10,两组收割架3下端的扇形齿轮10相互啮合,其中一侧的第一转轴21连接旋转气缸,旋转气缸可以带动第一转轴21转动,通过扇形齿轮10带动另一组第一转轴21转动,进而控制前后侧的收割架3张开或收折。
30.其中,移动支座1上端通过阻尼转轴5转动设置有伸缩夹持件6,伸缩夹持件6包括机械臂61、第二套筒62、夹板63和螺栓64,机械臂61呈l状,机械臂61竖直部分套设有第二套筒62,机械臂61左右两侧均设有第二滑槽611,第二套筒62对应第二滑槽611固定有第二滑块621,第二滑块621滑动设置于第二滑槽611内,机械臂61内中心安装有竖直推动第二套筒62伸缩的第二伸缩杆612,第二伸缩杆612为液压缸,液压缸上端与第二套筒62内顶部固定,第二套筒62外侧安装有l状的夹板63,夹板63与第二套筒62外侧端面形成“冂”状,夹板63外侧螺纹连接有螺栓64,螺栓64旋转便于将夹板63夹持在三轮车上端,通过液压缸调节第二套筒62的高度,适用不同高度的三轮车。
31.其中,梳齿42弯折朝上设置,且梳齿42弯折角度呈钝角设置,切割片43弯折设置,且弯折角度呈钝角,切割片43相邻一侧上下错位设置;使得采摘下来的花骨朵便于收集,通过弯折形状设置,梳齿42下端不容易损伤植物根茎。
32.其中,第二转轴423上端贯穿至梳齿42上端连接有拨杆425;第二转轴423在转动过程中带动拨杆425转动,进而加速梳齿42上端采摘的花朵下落至转板41上端,后通过转板41落入传送带7,进而加速收集,提高采摘的效率。
33.实施例二其中,如图10所示,移动支座1处设有卡腰口13,卡腰口13两侧分别连接绑带一11、绑带二12,绑带一11与绑带二12均连接有子母扣,且绑带二12处设置调节扣121,将卡腰口13处对准腰间将通过绑带一11与绑带二12固定,通过人体带动整个设备进行移动采摘,提高采摘效率。
34.工作原理:通过第二伸缩杆612推动第二套筒62往上移动调节好对应车辆高度的位置,通过夹板63扣在车辆门板或车头处,通过旋转螺栓64进行固定,将移动支座1移动至花田道路上,通过三轮车推动移动支座1移动,通过旋转气缸带动第一转轴21转动,进而带动另一组平行设置的第一转轴21相对转动,使得伸缩转轴2带动收割架3张开,启动第一伸缩杆23推动第一套筒22升降,根据花朵根茎的高度进行调节合适高度,通过移动支座1移动过程中梳齿42穿插植物根茎的缝隙,花朵进入梳齿42上端,通过电机带动转板41往上转动,然后图像采集设备31将每组梳齿42之间的花朵或花骨朵的图像上传与图像比对设备进行比对,当有花骨朵时,单片机控制器控制对应的正反电机414的继电器开关关闭,其余正常的正反电机414带动丝杆413转动,进而带动移动块421相互靠近,移动块421则带动梳齿42之间相互靠近,则齿条426驱动齿轮424转动进而带动切割片423往梳齿42之间的间隙中心一侧转动对花朵进行切割,第二转轴423在转动过程中带动拨杆425转动,进而加速梳齿42上端采摘的花朵下落至转板41上端,后通过转板41落入传送带7,进而加速收集,提高采摘的效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1