基于智能家庭的具有余粮提醒功能的宠物自动喂食机的制作方法
1.本发明属于喂食机技术领域,特别是涉及一种基于智能家庭的具有余粮提醒功能的宠物自动喂食机。
背景技术:
2.当主人外出时就会发生无人照看宠物的情况,目前一般的处理方法是委托寄养,这种形式对于较长期外出是比较理想的。对于短期外出的饲养者,将宠物委托寄养的成本则太高,但若是不委托寄养,宠物的喂食问题就成为需要考虑的问题,因而出现了一种宠物喂食机,喂食机又名喂食器,食物出口利用沙漏原理,当食物出口的食物被宠物吃完后,储食盒马上对其进行补充。
3.现有自动喂食机一般分为两种,一种自动喂食机与宠物餐盆是分离的,这一种宠物在进食时很容易移动餐盆,餐盆内的余粮很容易散落,造成餐盆外环境受到影响,同时余粮容易被宠物踩踏,另一种自动喂食机与宠物餐盆是连接的,上述两种自动喂食机在喂食结束后,餐盆内剩余的余粮不能得到很好的保护,容易沾染灰尘,也会造成食物污染,同时上述两种自动喂食机在喂食结束后都会因餐盆不易收纳而占用空间。
技术实现要素:
4.本发明的目的在于提供一种基于智能家庭的具有余粮提醒功能的宠物自动喂食机,解决了现有餐盆内余粮易受污染、餐盆占用空间的技术问题。
5.为达上述目的,本发明是通过以下技术方案实现的:
6.一种基于智能家庭的具有余粮提醒功能的宠物自动喂食机,包括喂食箱,喂食箱内转动配合有餐盆,餐盆内装设有第一储料斗、位于第一储料斗下侧的第二储料斗,第二储料斗下侧开口处装设有连接筒,连接筒外侧壁套设有固定筒,固定筒的底部活动配合有伸缩u形板;
7.喂食箱内弹性且滑动配合有第一连接板、位于第一连接板上侧的滑动板,固定筒外侧壁弹性且滑动配合有弧形板,餐盆的一侧装设有两个第三储料斗。
8.可选的,第一储料斗上侧开口处装设有适配的盖子,盖子的一侧装设有第一固定块。
9.可选的,喂食箱内装设有第一固定板,且滑动板滑动配合在第一固定板内,第一固定板上装设有两个第二固定块,滑动板的第一侧面装设有两个第三固定块,相邻第三固定块与第二固定块之间装设有第一弹簧,滑动板的第二侧面装设有两个第二连接板,且滑动板位于第一储料斗的下侧开口处和第二储料斗上侧开口处之间。
10.可选的,第二储料斗内装设有j形板,j形板的一端装设有料位传感器。
11.可选的,固定筒的外侧壁开设有第一槽道、与第一槽道相连通的两个第二槽道,且弧形板位于第一槽道内,弧形板的两侧均装设有连接柱,且连接柱位于第二槽道内,第二槽道侧壁与连接柱之间装设有第二弹簧。
12.可选的,固定筒的底部装设有两个第四固定块,两个第四固定块之间装设有第一固定杆,第一固定杆上转动配合有第二固定板,第二固定板上滑动配合有第三固定板。
13.可选的,伸缩u形板包括:装设在第三固定板一侧的第一u形板,第一u形板一端滑动配合有第二u形板,第一u形板两侧均装设有第五固定块,第二u形板两侧均装设有第六固定块,相邻第六固定块与第五固定块之间装设有第三弹簧。
14.可选的,餐盆的底部装设有两个第七固定块,餐盆的上侧装设有两个第八固定块,第八固定块的一侧装设有第二固定杆,第二固定杆的一端转动配合有转动板,第二u形板两侧均装设有第三固定杆,转动板一端转动配合在第三固定杆上。
15.可选的,喂食箱内装设有两个第四固定杆,两个第四固定杆之间滑动配合有滑动板,第四固定杆远离滑动板的端部装设有固定盘,滑动板与喂食箱底部之间装设有两个第四弹簧,且第一连接板装设在滑动板的一侧。
16.可选的,喂食箱的底部装设有两个第三连接板,且两个第三连接板均位于两个第四固定杆之间,第一u形板两侧均装设有第五固定杆,且第三连接板与第五固定杆转动配合。
17.本发明的实施例具有以下有益效果:
18.本发明的一个实施例通过在喂食箱的一侧装设可转动的餐盆,便捷了对宠物喂食后的餐盆进行收纳并减少其占用空间的情况,减少了宠物在进食时因餐盆晃动造成饲料散落的情况,减少了对餐盆外的环境的污染,第三储料斗的设置,一方面实现了第三储料斗对餐盆内余粮的储存,减少了余粮沾染灰尘的情况,另一方面在第一储料斗、第二储料斗无饲料时,第三储料斗内储存的饲料可以作为备用饲料,减少了宠物挨饿的情况。
19.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
20.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
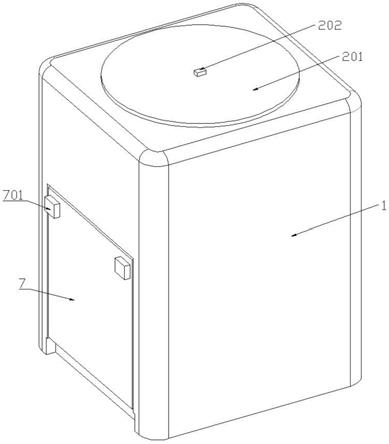
21.图1为本发明一实施例的立体结构示意图;
22.图2为本发明一实施例的剖面结构示意图;
23.图3为图2中a处结构示意图;
24.图4为图2中b处结构示意图;
25.图5为本发明一实施例的第一储料斗结构示意图;
26.图6为本发明一实施例的第二储料斗结构示意图;
27.图7为图6中c处结构示意图;
28.图8为本发明一实施例的餐盆结构示意图;
29.图9为图8中d处结构示意图;
30.图10为图8中e处结构示意图;
31.图11为本发明一实施例的固定筒结构示意图;
32.图12为图11中f处结构示意图。
33.其中,上述附图包括以下附图标记:
34.喂食箱1,第一储料斗2,盖子201,第一固定块202,第一固定板3,滑动板301,第二
连接板302,第二固定块303,第三固定块304,第一弹簧305,第二储料斗4,连接筒401,固定筒402,第一槽道403,弧形板404,连接块405,第二槽道406,第二弹簧407,连接柱408,第四固定块5,第一固定杆501,第二固定板502,第三固定板503,第一u形板504,第二u形板505,第五固定块506,第六固定块507,第三弹簧508,j形板6,料位传感器601,餐盆7,第七固定块701,第五斜面702,第二斜面板703,第三斜面704,第四斜面705,第一斜面板706,滑道707,第一斜面708,第二斜面709,第八固定块710,第二固定杆711,转动板712,第三固定杆713,斜面槽714,第三储料斗715,第四固定杆8,滑动板801,固定盘802,第四弹簧803,第一连接板804,连接柱805,第三连接板9,第五固定杆901,连接杆10。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
36.为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
37.请参阅图1-12所示,在本实施例中提供了一种基于智能家庭的具有余粮提醒功能的宠物自动喂食机,包括:喂食箱1,喂食箱1内转动配合有餐盆7,餐盆7内装设有第一储料斗2、位于第一储料斗2下侧的第二储料斗4,第二储料斗4下侧开口处装设有连接筒401,连接筒401外侧壁套设有固定筒402,固定筒402的底部活动配合有伸缩u形板;
38.喂食箱1内弹性且滑动配合有第一连接板804、位于第一连接板804上侧的滑动板301,固定筒402外侧壁弹性且滑动配合有弧形板404,餐盆7的一侧装设有两个第三储料斗715。
39.当需要对宠物进行喂食时:当第一储料斗2、第二储料斗4、第三储料斗715均无余粮时或喂食箱1第一次使用时,首先通过第一固定块202把盖子201从第一储料斗2上侧的开口处取出,然后把饲料储料盒倒扣在第一储料斗2上侧开口处,饲料通过第一储料斗2流入第二储料斗4内,然后再启动料位传感器601,料位传感器601在第一储料斗2内余粮不足时就会发出警报进行提醒,提醒饲养者进行添加饲料,然后启动电机,电机的输出端通过其中一个连接杆10带动餐盆7转动,餐盆7的一侧解除对两个第二连接板302的限位,第一弹簧305在弹性的作用下通过第三固定块304带动滑动板301在第一固定板3内滑动,滑动板301滑动至第一储料斗2下侧开口处和第二储料斗4上侧开口处之间,餐盆7带动两个第三储料斗715、两个第八固定块710转动,第三储料斗715通过连接柱805带动滑动板801在第四固定杆8上滑动,滑动板801拉伸第四弹簧803,滑动板801带动第一连接板804向上滑动,第八固定块710通过第二固定杆711带动转动板712移动,转动板712通过第三固定杆713带动第二u形板505在第一u形板504内滑动,第一u形板504带动第五固定杆901在第三连接板9内转动,第一u形板504带动第三固定板503在第二固定板502上滑动,第二固定板502在第一固定杆501上转动,因餐盆7带动第二u形板505一端移动的同时,第二u形板505一端会向上移动,第二u形板505在第一u形板504内滑动的同时会带动第一u形板504转动,同理,第一固定杆501向下移动,第一固定杆501通过两个带动固定筒402向下移动,固定筒402在向下移动的同
时,第一连接板804通过连接块405带动弧形板404在第一槽道403内滑动,弧形板404带动连接柱408在第二槽道406内滑动,连接柱408拉伸第二弹簧407,第二储料斗4内的饲料通过连接筒401流入固定筒402内,固定筒402内的饲料通过第一u形板504流入第二u形板505,第二u形板505上的饲料通过滑道707流入餐盆7内,然后宠物可以食用餐盆7内的饲料;
40.当对宠物进行喂食结束时,参考上述步骤即可,餐盆7内的余粮通过第四斜面705、第二斜面709流至斜面槽714内,斜面槽714通过第五斜面、第六斜面702把饲料输送至第三储料斗715内进行储存;
41.当料位传感器601发出警报,饲养者没有进行补充饲料时,参考上述步骤,第一种餐盆7内饲料由第二储料斗4内储备的饲料最终输送餐盆7内,第二种餐盆7内饲料由第三储料斗715内储备的饲料输送餐盆7内。需要注意的是,本技术中所涉及的用电设备均可通过蓄电池供电或外接电源。
42.通过在喂食箱1的一侧装设可转动的餐盆7,便捷了对宠物喂食后的餐盆7进行收纳并减少其占用空间的情况,减少了宠物在进食时因餐盆7晃动造成饲料散落的情况,提高了餐盆7外的环境,第三储料斗715的设置,一方面实现了第三储料斗715对餐盆7内余粮的储存,减少了对餐盆7外的环境的污染,另一方面在第一储料斗2、第二储料斗4无饲料时,第三储料斗715内储存的饲料可以作为备用饲料,减少了宠物挨饿的情况。
43.请参阅图2所示,本实施例的第一储料斗2上侧开口处装设有适配的盖子201,减少了喂食箱1在不使用时的第一储料斗2内落灰的情况,盖子201的一侧装设有第一固定块202,方便了通过第一固定块202拿起盖子201,餐盆7内装设有第一斜面板706、两个第二斜面板703,且第一斜面板706位于两个第二斜面板703之间,第一斜面板706一侧开设有滑道707,方便了对第二u形板505内的饲料进行输送,喂食箱1一侧开设有槽道,第一斜面板706上设置有两个第一斜面708、两个第二斜面709,且两个第一斜面708均位于两个第二斜面709之间,如图8所示,第一斜面708朝向第二u形板505,第二斜面709朝向第七固定块701,第七固定块701方便了对使用的餐盆7进行支撑,第二斜面板703上设置有第三斜面704、第四斜面705,且第三斜面704朝向第二u形板505,第四斜面705朝向第七固定块701,餐盆7上开设有两个斜面槽714,餐盆7内的余粮方便了通过第四斜面705、第二斜面709流入斜面槽714内,斜面槽714上设置有第五斜面,第三储料斗715装设在斜面槽714内,第三储料斗715开口处设置有第六斜面702,且带有第六斜面702的第三储料斗715开口处贴合在第五斜面上,斜面槽714内的余粮方便了通过第五斜面、第六斜面702流入第三储料斗715内,第三储料斗715方便了对餐盆7内余粮进行储存,减少了余粮沾染灰尘的情况。
44.请参阅图6所示,本实施例的喂食箱1内装设有第一固定板3,且滑动板301滑动配合在第一固定板3内,减少了滑动板301在滑动时倾斜的情况,提高了滑动板301在滑动时的稳定性,第一固定板3上装设有两个第二固定块303,滑动板301的第一侧面装设有两个第三固定块304,相邻第三固定块304与第二固定块303之间装设有第一弹簧305,滑动板301方便了在第一弹簧305弹性的作用下及时复位,滑动板301的第二侧面装设有两个第二连接板302,且滑动板301位于第一储料斗2的下侧开口处和第二储料斗4上侧开口处之间,方便了通过滑动板301对第二储料斗4内饲料进行控制,餐盆7的两侧均装设有连接杆10,且连接杆10转动配合在槽道内,喂食箱1侧壁内装设有电机,且电机的输出端与其中一个连接杆10的一端相连接,电机方便了通过其中一个连接杆10对餐盆7进行驱动。
45.请参阅图1所示,本实施例的第一储料斗2内装设有j形板6,第一储料斗2的截面呈v形,第二储料斗4截面呈对称设置的y形结构,j形板6的一端装设有料位传感器601,对第一储料斗2内的余粮进行监测,固定筒402的外侧壁开设有第一槽道403、与第一槽道403相连通的两个第二槽道406,且弧形板404位于第一槽道403内,减少了弧形板404在滑动时倾斜的情况,提高了弧形板404在滑动时的稳定性,弧形板404的两侧均装设有连接柱408,且连接柱408位于第二槽道406内,减少了连接柱408在滑动时倾斜的情况,第二槽道406侧壁与连接柱408之间装设有第二弹簧407,方便了连接柱408在第二弹簧407弹性的作用下复位,固定筒402的底部装设有两个第四固定块5,两个第四固定块5之间装设有第一固定杆501,第一固定杆501上转动配合有第二固定板502,第二固定板502上滑动配合有第三固定板503,减少了第三固定板503在滑动时倾斜的情况,提高了第三固定板503在滑动时的稳定性。
46.请参阅图3所示,本实施例的伸缩u形板包括:装设在第三固定板503一侧的第一u形板504,第一u形板504一端滑动配合有第二u形板505,减少了第二u形板505在活动时倾斜的情况,提高了第二u形板505在活动时的稳定性,第一u形板504两侧均装设有第五固定块506,第二u形板505两侧均装设有第六固定块507,相邻第六固定块507与第五固定块506之间装设有第三弹簧508,第二u形板505在第三弹簧508弹性的作用下及时复位,餐盆7的底部装设有两个第七固定块701,餐盆7的上侧装设有两个第八固定块710,第八固定块710的一侧装设有第二固定杆711,第二固定杆711的一端转动配合有转动板712,第二u形板505两侧均装设有第三固定杆713,转动板712一端转动配合在第三固定杆713上,第二固定杆711、第三固定杆713对转动板712周向方向进行导向,减少了转动板712在第二固定杆711、第三固定杆713轴向方向上滑动,喂食箱1内装设有两个第四固定杆8,两个第四固定杆8之间滑动配合有滑动板801,第四固定杆8远离滑动板801的端部装设有固定盘802,固定盘802减少了滑动板801从第四固定杆8上滑出的情况,滑动板801的一侧装设有两个连接柱805,滑动板801与喂食箱1底部之间装设有两个第四弹簧803,方便了滑动板801在弹簧803弹性的作用下及时复位,且第一连接板804装设在滑动板801的一侧,喂食箱1的底部装设有两个第三连接板9,且两个第三连接板9均位于两个第四固定杆8之间,第一u形板504两侧均装设有第五固定杆901,且第三连接板9与第五固定杆901转动配合,减少了第五固定杆901在转动时倾斜的情况发生,提高了第五固定杆901在转动时的稳定性。
47.实施例1:在实施例的一个方面中,为了尽可能减少转动板712在转动时倾斜的情况,本实施例提供了两种可选的实施方式。
48.实施例1.1,在本实施例中,转动板712的一端与第二固定杆711转动配合,减少了转动板712在转动时倾斜的情况发生,进而提高了第三固定杆713在转动时的稳定性。
49.实施例1.2,在本实施例中,转动板712的另一端与第三固定杆713转动配合,减少了第三固定杆713在转动时晃动的情况发生。
50.上述实施例可以相互结合。
51.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
52.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1