一种农用旋耕机的制作方法
:
1.本发明涉及农业机械技术领域,特指一种农用旋耕机。
背景技术:
2.目前的农用旋耕机主要包括两部分组成:机车和旋耕机构,机车一般采用柴油内燃机驱动的拖拉机,旋耕机构安装在机车上或者通过机车牵引,实现在农田中作业。这种传统的农用耕种机存在以下不足:
3.(1)由于传统的农用旋耕机体型较大,无法适用于山区丘陵种植地带,以及地域较为狭小、封闭的区域,并且旋耕机构自身不具有行驶功能,所以其在运输过程中通常都需要借助其他机动车辆进行运输,无法直接跟随牵引机车在道路上行驶。
4.(2)传统的农用旋耕中,机车和旋耕机构之间通过牵引装置连接,但是现有牵引装置结构复杂,并且难以自动调节,导致旋耕机构随机车运行时,对耕地的处理会出现不均衡的问题,例如,由于受力不均衡导致耕地翻耕的深度不等。
5.有鉴于上述问题,本发明人提出以下技术方案。
技术实现要素:
6.本发明所要解决的技术问题在于克服现有技术的不足,提供一种农用旋耕机。
7.为了解决上述技术问题,本发明采用了下述技术方案:一种农用旋耕机,包括:牵引机车、旋耕机构以及用于连接牵引机车和旋耕机构的牵引机构,所述的牵引机车包括:采用履带的机车主体和安装在牵引机车上用于驱动履带驱动轮运行的牵引电机;所述的旋耕机构包括:基座、安装于基座上的刀轴和用于驱动刀轴运转的旋耕电机,所述的刀轴上沿轴向方向分布有旋刀;所述的牵引机构采用活结连杆机构令旋耕机构活动连接于牵引机车上;于所述的旋耕机构上还设置有对旋耕机构进行支撑的支撑机构。
8.进一步而言,上述技术方案中,所述的支撑机构设置于旋耕机构上基座靠近牵引机车的一端。
9.进一步而言,上述技术方案中,所述的支撑机构包括:支撑臂和位于在支撑臂下端的支撑板,所述的支撑板朝向牵引机车的方向向上翘起。
10.进一步而言,上述技术方案中,所述的支撑臂与基座之间为可调节高度的活动连接。
11.进一步而言,上述技术方案中,所述的支撑机构设置于旋耕机构上基座远离牵引机车的一端,该支撑机构为枢接在基座上的活动板,农用旋耕机工作状态下,该活动板贴合于地面。
12.进一步而言,上述技术方案中,所述牵引机车与牵引机构之间设置有翻转驱动件,通过翻转驱动件驱动牵引机构转动,从而带动旋耕机构及设置在旋耕机构上的支撑机构离开地面。
13.进一步而言,上述技术方案中,所述的翻转驱动件为液压活塞件、丝杆、气压活塞
件、电动驱动的链条传动机构、钢丝收卷机构中的任意一种。
14.进一步而言,上述技术方案中,所述的牵引机构包括:一枢接在牵引机车上的翻转架、固定在耕种装置基座上的固定架、连接于翻转架和固定架之间的活结连杆机构,所述的翻转驱动件安装在牵引机车上并与翻转架枢接,并且翻转驱动件位于牵引机车与翻转架之间枢接部的下方。
15.进一步而言,上述技术方案中,所述的翻转架与固定架之间还设置有牵引链。
16.进一步而言,上述技术方案中,所述的牵引机构包括:固定在牵引机车上的支撑架、连接于牵引机车和基座之间的活结连杆机构,所述的翻转驱动件枢接在支撑架并与基座枢接,并且翻转驱动件位于活结连接杆机构的上方。
17.采用上述技术方案后,本发明与现有技术相比较具有如下有益效果:
18.1、本发明中通过合理设置,提高牵引力的均衡分配,克服由于旋耕机构自身重力原因或者因地面不平原因导致的受力不均衡问题。
19.2、本发明中还设置有支撑机构,该支撑机构可以配合牵引机构,令旋耕机构在运行中保持平衡稳定,令旋耕机构翻耕的深度保持一致,不至于出现旋耕机构深陷土地中的情况。
20.3、本发明还具有翻转功能,通过翻转驱动件带动旋耕机构转动,令其脱离地面,实现悬空。这样牵引机车就可以直接背负旋耕机构行驶,旋耕机构无需再通过其他机动车进行运载。
21.4、本发明不再使用大马力型柴油机作为动力,改用履带电动牵引机车,通过电池为牵引电机供电,带动牵引机车运行。同时,旋耕机构中的刀轴也通过旋耕电机驱动。由于现有技术中通常采用内燃机作为动力源,耕种所需要的动力通过复杂的传动机构与动力源连动,这样造成中间能耗损失较大,导致效率较低。本发明中牵引电机和旋耕电机相互独立,各自作为独立的动力源。这样一来,可根据需要选择适当的电机,从而减少了中间传动过程中能耗损失,提升电池使用效率。
附图说明:
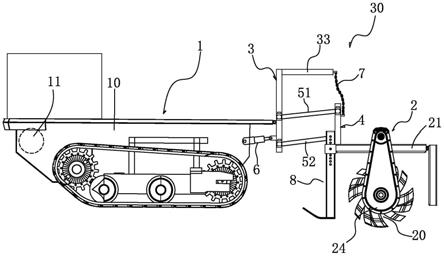
22.图1是本发明实施例一工作状态的主视图;
23.图2是本发明实施例一中旋耕机构翻转状态的主视图;
24.图3是本发明实施例一中去掉牵引机车后的俯视图;
25.图4是本发明实施例一翻转架的右视图;
26.图5是本发明实施例一固定支架及旋耕机构的右视图;
27.图6是本发明实施例二的工作状态主视图;
28.图7是本发明实施例三的工作状态主视图。
具体实施方式:
29.下面结合具体实施例和附图对本发明进一步说明。
30.本发明为一种农用旋耕机,见图1至图5所示,这是本发明的实施例一,其包括:牵引机车1、旋耕机构2、用于连接牵引机车1和旋耕机构2的牵引机构30、翻转驱动件6和支撑机构8。
31.所述的牵引机车1包括:采用履带的机车主体10和安装在牵引机车1上用于驱动履带驱动轮运行的牵引电机11。本实施例一中,机车主体10采用电动履带驱动机车,为了便于控制方向,所述的牵引电机11有两台,其分别用于驱动左右两侧履带驱动轮运行,这样可以通过控制左右两台牵引电机11的输出从而控制整个接车主体10的进退和转向。牵引电机11可采用直流无刷电机,其输出轴通过齿轮、链条、或皮带驱动履带中的驱动轮运行。牵引机车1采用锂电池供电,锂电池一般重量较重,其可以位于相对旋耕机构2的另一侧,这样可起到配重效果,以对整个机械起到平衡作用。
32.所述的旋耕机构2包括:基座21、安装于基座21上的刀轴22和用于驱动刀轴22运转的旋耕电机23,所述的刀轴22上沿轴向方向分布有旋刀20。旋耕电机23输出轴与刀轴22之间通过传动机构实现连动。在运行过程中,旋刀20将随刀轴22快递转动,实现耕地功能。由于耕地中难免出现石块等坚硬物体,当旋刀20转动过程中遇到石块时,可能造成旋刀20卡死无法转动,此时旋耕电机23可能出现因负载过大烧毁的情况。所以,本实施例一中所述的旋耕电机23输出轴与刀轴22之间的传动机构中至少具一组非刚性传动组件。这样可以避免旋耕电机23因极端情况下出现因负载过大烧毁的情况。具体而言,所述的非刚性传动组件为设置在旋耕电机23输出轴上的皮带传动组件24,当旋刀20卡死无法转动时,可通过皮带传动组件24的打滑避免旋耕电机23烧毁情况。
33.所述的旋耕机构2通过牵引机构30活动连接于牵引机车1上。所述的牵引机构30包括:一枢接在牵引机车1上的翻转架3、固定在旋耕机构2上的固定架4、连接于翻转架3和固定架4之间的活结连杆机构5。另外,翻转驱动件6安装在牵引机车1上并与翻转架3枢接。如图1所示,工作时,旋耕机构2通过牵引机构30活动连接于牵引机车1,当牵引机车1行进时,将通过牵引机构30带动旋耕机构2行进,从而实现耕地作业。见图2所示,当耕地完成后,牵引机构30通过翻转驱动件6推动翻转架3转动,拉动固定架4及旋耕机构2转动后,令旋耕机构2和支撑机构8脱离底面,实现悬空。此时,牵引机车1就可以直接背负旋耕机构2行驶,旋耕机构2无需再通过其他机动车进行运载。使用者在使用时可以直接通过牵引机车1将整个农耕机械运行至指定位置后,再通过本发明放下旋耕机构,进行农耕作业。
34.下面是本实施例中牵引机构30较佳的一种实施方式,本实施方式中,所述的翻转架3包括:翻转架主杆31、翻转架纵杆32、翻转架悬杆33以及翻转副架34。其中翻转架主杆31横向设置,两翻转架纵杆32纵向设置在翻转架主梁31上方。翻转架悬杆33位于每根翻转架纵杆32上端,并且向旋耕机构2方向延伸。翻转副架34位于翻转架主杆31下方。所述的固定架4包括:固定支撑杆41和通过固定支撑杆41支撑的固定横杆42。固定架4可以独立设置,然后通过焊接方式固定在旋耕机构2的基座21上,也可以直接在基座21一体成型。
35.所述的活结连杆机构5包括:连动杆53和位于连动杆53两端的活结结构50,活结连杆机构5活动连接在翻转架3和固定架4之间,且该活结连杆机构5包括:位于上方的上活结连杆机构51和位于下方的下活结连杆机构52。
36.为了保证拖曳牵引过程中的平衡,上活结连杆机构51和下活结连杆机构52的分布方式可采用如下方式:对称分布的两根上活结连杆机构51和对称分布的两根下活结连杆机构52。且所述对称分布的两根上活结连杆机构51呈“八”字形,所述对称分布的两根下活结连杆机构52呈“八”字形,且上活结连杆机构51与下活结连杆机构52分布造型相反。即,在翻转架3上:用于连接两根上活结连杆机构51一端的活结结构50位于翻转架主杆31两侧靠外
侧位置;用于连接两根下活结连杆机构52一端的活结结构50位于翻转架副架34上,并且位于翻转架副架34上两活结结构50之间的间距小于位于翻转架主杆31上两活结结构50之间的间距。在固定支架4上,用于连接两根上活结连杆机构51另一端的活结结构50位于固定横杆42靠中间区域位置;用于连接两根下活结连杆机构52另一端的活结结构50可直接固定在旋耕机构的基座21上,并且位于固定横杆42上两活结结构50之间的间距小于位于基座21上两活结结构50之间的间距。当然,上述上活结连杆机构51和下活结连杆机构52的分布方式也可以采用相反的方式进行分布。
37.上述的活结结构50可以采用球头连接、或者轴孔连接、或者万向节等活结连接方式,从而实现旋耕机构2可以在运行过程中自动调节方向,实现两侧平衡,同时配合上活结连杆机构51和下活结连杆机构52的牵制,可以对整个旋耕机构2起到一定的限制作用,不至于令旋耕机构2偏转幅度过大。另外,连动杆53可采用可伸缩结构,以实现长度调节。
38.另外,由于旋耕机构2通常不能在道路上行进。所以为了保证本发明可以正常在道路上行驶,在非耕种期间需要将旋耕机构2收起。此时可利用牵引机构令旋耕机构2转动,令旋耕机构2离开地面。见图2所示,本实施例中所述的翻转驱动件6具有推动功能,可以直接翻转支架3转动,从而驱动固定架4和旋耕机构2转动,从而令整个旋耕机构2离开地面。所述的翻转驱动件6可采用液压活塞件,当然也可采用丝杆、气压活塞组件、电动驱动的链条传动机构、钢丝收卷机构中的任意一种。
39.本实施例中,翻转驱动件6位于牵引机车1与翻转架3之间枢接部的下方,这样可以令翻转驱动件6工作时,其形成距离较短,整体长度也无需太长。
40.由于翻转架3与固定架4之间是通过活结连杆机构5活动连接的,所以当翻转驱动件6直接驱动推动翻转架3转动时,活结连杆机构5如果直接受力带动翻转架3转动,则可能令活结连杆机构5两端的活结结构50受力过大脱落或损坏,所以较佳的方式是通过一个牵引链7带动。该牵引链7位于翻转架3与固定架4之间,并且保留适当的冗余。当翻转架3转动时,最开始阶段,因为活结连杆机构5存在,固定架4并不会直接被带动转动,随着翻转架3持续转动,牵引链7涨紧,则拉动固定架4开始随翻转架3转动,直至整个旋耕机构2脱离地面,实现悬空。
41.为了增加力矩,减少受力,牵引链7上的承受的拉力最好是直接沿固定架4转动的切线方向分布,所以本实施例中可以将牵引链7的一端直接固定在翻转架悬杆33的末端。由于翻转架悬杆33向固定架4方向延伸,其末端相对固定架4的距离较短,将牵引链7固定在该翻转架悬杆33末端,可以有效缩短牵引链7的长度,并且令其拉力尽可能与固定架4转动的切线方向吻合,从而减少受力。本发明中的牵引链7可以采用牵引钢丝或绳索。
42.另外,对于本实施例一而言,旋根装置2在工作时,随着刀轴22的运行,旋刀20耕地深度可能逐渐向下。所以为了确保旋根装置2翻耕的土地深度保持一致,需要设置支撑机构8。见图1、图2、图3所示,靠近牵引机车1的一端还设置有支撑机构8,该支撑机构8包括:两根可调节高度的支撑臂81和位于两支撑臂81下端的支撑板82;支撑板82朝向牵引机车1的方向向上翘起,并且其下表面为平面或者弧面。由于支撑板82的存在,其与土地的接触面较大,所以对土地压力较小,从而令整个旋耕机构2不会逐渐深入土地中,令翻耕的土地深度保持一致。牵引机构30通过翻转驱动件6推动翻转架3转动,拉动固定架4及旋耕机构2转动后,令旋耕机构2和支撑机构8脱离底面,实现悬空。
43.所述的支撑机构8调节高度的方式为:在旋耕机构2上固定有套管83,所述的支撑臂81插套于套管83中,并且通过销钉将支撑臂81固定在套管83中,所述的支撑臂81上开设有多个与销钉配合的定位孔810。这样通过销钉与不同高度的定位孔810配合就可以实现支撑臂81的高度调节。当然,这种高度调节方式也可采用螺杆结构进行调节。
44.见图6所示,这是本发明的实施例二。本实施例二中,所述的牵引机构30包括:固定在牵引机车1上的支撑架35、连接于牵引机车1和基座21之间的活结连杆机构5,所述的翻转驱动件6安装在支撑架35上,并与基座21枢接,所述的翻转驱动件6位于活结连接杆机构5的上方。其同样可以实现牵引目的,并且可直接通过翻转驱动件6带动拉动旋耕装置2翻转。
45.见图7所示,这是本发明的实施例三。本实施例三中,所述的支撑机构8设置于旋耕机构2上基座21远离牵引机车1的一端,该支撑机构8为枢接在基座21上的活动板84,农用旋耕机工作状态下,该活动板84贴合于地面。通过活动板84起到对整个旋耕机构2的支撑,从而令整个旋耕机构2不会逐渐深入土地中,令翻耕的土地深度保持一致。农用旋耕机不工作状态下或者被翻转驱动件6带动悬空状态下,活动板84在重力作用下自然下垂。
46.当然,以上所述仅为本发明的具体实施例而已,并非来限制本发明实施范围,凡依本发明申请专利范围所述构造、特征及原理所做的等效变化或修饰,均应包括于本发明申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1