一种行内实时机械除草设备及除草方法
1.本发明属于农用机械设备技术领域,涉及一种农田除草装备及其工作方法,尤其涉及一种行内实时机械除草设备及除草方法。
背景技术:
2.农作物在生长过程中,农田中生命力强的杂草会与作物争夺养料、水分和空间;特别是在四到六叶期的幼苗,农作物的生命力相对于杂草较为脆弱,易被淘汰,所以除草是必不可少的一道工序。传统的除草是采用锄头来完成的:锄头的头部深入土壤中,人工拉动锄头的手柄,使锄头在土壤中移动,在地表以下把草根铲断,同时对农田进行松土,再对成块的土壤用锄头打碎,最终达到除草、松土、保水及预防土壤结痂的效果。对于上述人工除草的方式,虽然要求低,但耗力多、工效低,且不能大面积及时防除。因此,机械除草目前是主流的物理除草方式,该种除草方式是专门设计用来控制作物行内的杂草,即那些在行中央但在安全区之外的杂草,而不损害精确种植的行作物。
技术实现要素:
3.目前市面上并没有较多的针对矮株经济作物的除草装备可以选择,而在矮株经济作物的除草环节中,前期的除草(特别4-6是叶期)尤为关键,本技术提出一种针对矮株经济作物前期除草的装备和除草方法,针对众多经济作物在行内除草技术上存在的不足,本发明的目的是提供一种除草车及其除草方法,能够解决作物行内及其周边由于作业情况复杂和作业遗漏等导致的作业效率低的问题。
4.为了实现上述目的,本发明通过如下技术方案实现:
5.一种行内实时机械除草设备,包括:除草车本体1、两个侧翼6、除草刀系统、作物识别系统和控制系统;
6.所述除草刀系统包括:气压缸一7、两根连接杆8、两个小电机9、两把除草刀10、气压缸二16、两个连接块17和传动机构;
7.所述传动机构包括:两个滑块18和两个滑轨19;
8.所述作物识别系统包括:rgb摄像机11、暗室12和四个卤素灯13;
9.所述控制系统包括:处理器5和除草刀驱动模块;
10.在所述除草车本体1的顶部下方,距除草车本体1后端三分之一处的左右两侧分别对称设置一个l型侧翼6;
11.位于左侧的侧翼6与气压缸一7的固定端连接,所述气压缸一7的活动端与连接块17的一端连接;
12.所述连接杆8竖直放置,所述连接块17的另一端与连接杆18的靠近上端处连接;所述小电机9固定在连接杆18的下端;所述小电机9的输出轴竖直朝下,且小电机9的输出轴与除草刀10的中心固定连接;
13.所述气压缸一7的冲程方向与连接杆8互相垂直,避免在运动过程中由于倾斜角
度,而导致连接部分的应力增加;
14.位于右侧的侧翼6与气压缸二16的固定端连接,所述气压缸二16的活动端与另一个连接块17的一端连接;
15.另一根连接杆8竖直放置,另一个连接块17的另一端与另一根连接杆18的靠近上端处连接;另一个小电机9固定在另一根连接杆18的下端;所述另一个小电机9的输出轴竖直朝下,且另一个小电机9的输出轴与另一把除草刀10的中心固定连接;
16.所述气压缸二16的冲程方向与另一根连接杆8互相垂直,避免在运动过程中由于倾斜角度,而导致连接部分的应力增加;
17.所述处理器5与除草刀驱动模块连接,所述除草刀驱动模块与两个小电机9均连接;
18.所述除草刀驱动模块在处理器5的控制下驱动两个小电机9转动,进而带动两把除草刀10旋转,除草刀10切入土壤,并向前推进,将行间以及行内安全区范围外的杂草铲除,完成除草过程;
19.所述两根连接杆8的上端分别与一个滑块18固定连接;
20.在所述除草车本体1的底部距除草车本体1后端三分之一处设有两根横向布置且位于同一直线的滑轨9;
21.两个滑块18分别位于两个滑轨9中,且分别能够在两根滑轨9中左右自由滑动;
22.所述暗室12安装在所述除草车本体1的底部前方;
23.所述rgb摄像机11与处理器5连接,且所述rgb摄像机11安装在所述暗室12内;
24.所述四个卤素灯13分别安装在所述暗室12内顶部的四个角;
25.所述四个卤素灯13通过调整其角度,点亮整个暗室12,为rgb摄像机11提供光源,同时消除进入暗室12的植株的阴影;
26.所述rgb摄像机11进行拍照,经过延时后,将图像信息传送给处理器5处理,处理器5对行间以及行内安全区范围进行识别,控制气压缸一7和气压缸二16带动除草刀10左右移动,将行间以及行内安全区范围外的杂草铲除;
27.所述安全区范围为:以作物为中心的半径为6cm左右的圆形区域。
28.在上述技术方案的基础上,在所述除草车本体1的安装设置有控制箱2;
29.所述处理器5和除草刀驱动模块均安装在控制箱2内。
30.在上述技术方案的基础上,所述行内实时机械除草设备还包括:四个电驱动轮14;
31.所述控制系统还包括:除草车驱动模块和实时定位模块;所述除草车驱动模块和实时定位模块均安装在控制箱2内;
32.所述处理器5与除草车驱动模块、实时定位模块均连接,所述除草车驱动模块与四个电驱动轮14连接;
33.在所述除草车本体1的底部前端的左右两侧对称设置两个电驱动轮14,在所述在所述除草车本体1的底部后端的左右两侧对称设置两个电驱动轮14;
34.所述实时定位模块定位田间位置,并将田间位置信息发送给处理器5;处理器5根据田间位置信息控制除草车驱动模块驱动四个电驱动轮14转动,进而使除草车本体1沿着作物行在田间行走移动。
35.在上述技术方案的基础上,所述四个电驱动轮14的直径为:50cm,宽度为:20cm,可
以较好地通过行间,同时避免土壤压实等情况。较大的电驱动轮14可以让除草车本体1轻松跨过甜菜和莴苣等矮小的经济作物。
36.在上述技术方案的基础上,所述气压缸一7和气压缸二16的行程为:15cm。
37.在上述技术方案的基础上,所述除草车本体1与两个侧翼6一体制造。
38.在上述技术方案的基础上,位于左侧的侧翼6与气压缸一7的固定端通过焊接连接,位于右侧的侧翼6与气压缸二16的固定端通过焊接连接。
39.在上述技术方案的基础上,所述气压缸一7的活动端与连接块17的一端通过铆钉铆接连接;所述连接块17的另一端与连接杆18的靠近上端处也通过铆钉铆接连接;
40.所述气压缸二16的活动端与另一个连接块17的一端通过铆钉铆接连接,另一个连接块17的另一端与另一个连接杆18的靠近上端处也通过铆钉铆接连接。
41.在上述技术方案的基础上,所述行内实时机械除草设备还包括:电源3;
42.所述电源3安装在控制箱2内;
43.所述电源3与处理器5连接;
44.所述电源3为处理器5供电。
45.在上述技术方案的基础上,所述行内实时机械除草设备还包括:接收天线15和遥控器;
46.所述接收天线安装在所述除草车本体1的顶部后端,所述接收天线15与遥控器无线连接,所述接收天线15与处理器5连接;
47.所述遥控器通过接收天线15向处理器5发送控制信号,进而控制所述行内实时机械除草设备的运行。
48.在上述技术方案的基础上,所述除草刀10包括:除草刀刀体20和若干除草刀刀片21;
49.所述除草刀刀体20为:圆盘式;
50.在所述除草刀刀体20的边缘均布固定所述若干除草刀刀片21。
51.在上述技术方案的基础上,所述除草刀刀体20采用经预硬化处理的工具钢制造。
52.在上述技术方案的基础上,所述除草刀刀体20的厚度为6.4mm。
53.在上述技术方案的基础上,所述若干除草刀刀片21形状近似为弯曲的梯形;若干除草刀刀片21在入土端的斜边刀刃与除草刀刀体20的平面呈30
°
角。
54.在上述技术方案的基础上,所述若干除草刀刀片21的厚度为:5mm;所述若干除草刀刀片21的高度为:2cm;所述若干除草刀刀片21在水平面投影的宽度为:3cm。
55.在上述技术方案的基础上,所述除草刀刀片21的数量为四。
56.在上述技术方案的基础上,所述暗室12由遮光布围成;
57.在所述暗室12前后两面的遮光布被切割成布条,以方便植株通过暗室12。
58.在上述技术方案的基础上,所述实时定位模块包括:北斗实时定位模块4和gps实时定位模块。
59.在上述技术方案的基础上,所述北斗实时定位模块4为:北斗rtk高精度定位模块。
60.在上述技术方案的基础上,所述处理器5为:raspberry pi。
61.在上述技术方案的基础上,所述小电机9的输出轴与除草刀10的中心通过联轴器固定连接。
62.在上述技术方案的基础上,当所述除草刀10除草时,左侧的除草刀10进行顺时针转动,右侧的除草刀10进行逆时针转动。
63.一种应用上述行内实时机械除草设备的除草方法,包括以下步骤:
64.s1、rgb摄像机11拍照,经过延时(因为除草刀10在rgb摄像机11的后面),将图像信息传送给处理器5;
65.s2、处理器5对作物识别,进行特征提取,对安全区范围及非安全区范围进行分类;
66.所述安全区范围为:以作物为中心的半径为6cm左右的圆形区域;
67.所述非安全区范围为:在作物行内安全区范围以外的地方;
68.s3、处理器5采用控制算法,并结合实时定位,控制两把除草刀10的左右横向移动位置;
69.处理器5结合实时定位并控制除草车本体1向前移动和两把除草刀10旋转,进行除草操作;
70.所述控制算法是:将分类后的区域用矩形框进行框选,通过掩膜覆盖后,剪裁提取出目标作物,把矩形框的中心看作主茎秆的坐标,进而控制两把除草刀10的开合,以避开作物完成除草过程。
71.本发明的有益技术效果如下:
72.本发明主要针对甜菜、莴苣诸如此类的矮小的经济作物,在作物四到六叶期的除草装备,在除草的过程中能实现自动控制,能够沿作物行前进,同时清楚杂草实现精准除草。本发明的行内实时机械除草设备通过作物识别系统真正实现了在田间自动行内除草,为大田经济作物提供了一种有效的行内除草手段,大大提高了行内除草的效率,不需要人员进行高强度的操作,在提高了除草效率的同时,极大地降低了操作人员的劳动强度,节约了人力成本,提高了工作效率。本技术技术方案中的绕开作物的工作方式是:将除草刀10拉到作物的两侧,并不将除草刀10提起,也可以将除草刀10改为提起的结构,但是这样就不能将作物两侧的杂草清除。
附图说明
73.本发明有如下附图:
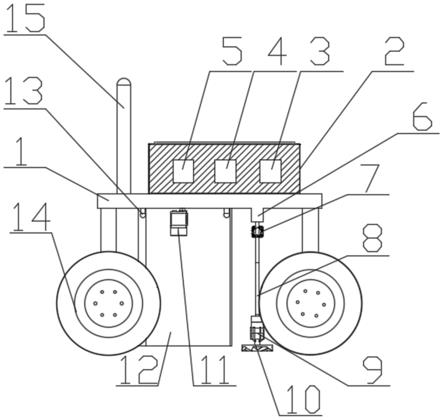
74.图1为本发明所述一种行内实时机械除草设备的结构示意图;
75.图2为本发明所述除草刀系统的结构示意图;
76.图3为本发明所述作物识别系统的结构示意图;
77.图4为本发明所述传动机构的结构示意图;
78.图5为本发明所述除草刀10的立体结构示意图;
79.图6为本发明所述除草刀10的仰视结构示意图;
80.图7为本发明所述控制系统的连接示意框图;
81.图8为本发明所述行内实时机械除草方法的流程示意图。
82.附图标记:
83.1、除草车车体;2、控制箱;3、电源;4、北斗实时定位模块;5、处理器;6、侧翼;7、气压缸一;8、连接杆;9、小电机;10、除草刀;11、rgb摄像机;12、暗室;13、卤素灯;14、电驱动轮;15、接收天线;16、气压缸二;17、连接块;18、滑块;19、滑轨;20、除草刀刀体;21、除草刀
刀片。
具体实施方式
84.下面将结合本发明实施例中的附图,对本发明的技术方案进行清楚和完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,并不是全部的实施例。需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制本发明。如在这里所使用的,除非本发明另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;为了方便叙述,本发明中如果出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述发明和简化描述,而不是指示或暗示所指设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为本发明的限制。术语解释部分:本发明中的术语“安装”、“相连”、“连接”和“固定”等术语应做广义理解,例如,可以是固定连接,也可以是拆卸连接,或为一体;可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介间接相联,可以是两个元件内部连接,或者两个元件的相互作用关系,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明的具体含义。
85.正如背景技术所介绍的,现有技术中存在以下严重问题:除草设备在除草过程中会遇到除草不精细、除草效率低和除草过程中除草刀带土严重等,为了解决如上的技术问题,本发明提出一种基于动态识别的行内除草设备及除草方法(即行内实时机械除草设备及除草方法)。
86.本发明的一种典型的实施方式中,如图1-7所示,一种经济作物行内除草装备(即行内实时机械除草设备),包括:除草车车体1,除草车车体1下侧壁对称设置有四个前后均匀分布的电驱动轮14,在除草车车体1内设置有与电驱动轮14相匹配的除草车驱动模块,在除草车车体1的上方设置有控制箱2,在控制箱2内设置有电源3、北斗实时定位模块4和处理器5。所述除草刀系统设置在距离除草车本体1后端三分之一处,由气压缸一7、连接杆8、小电机9、除草刀10、气压缸二16和连接块17组成,所述除草刀10的一端通过联轴器与小电机9连接,另一端伸出的除草刀刀片21侵入土壤,所述除草刀10开始工作时,小电机9带动除草刀10旋转,除草刀10切入土壤并向前推进,将行间以及行内安全区范围外的杂草铲除,完成除草过程。田间行内除草装备(即行内实时机械除草设备)在除草的过程中,除草刀系统与作物识别系统配合使用,可以有效地避开田间农作物,在行间以及行内安全区以外的路途上进行除草,防止在除草过程中伤害农作物,在提高了除草效率的同时,降低了工作人员的劳动强度,实现了行间及行内安全区外的自动除草。上述所述安全区是指工作人员在用锄头进行除草的过程中,当遇到与植株贴合较近的杂草,无法用工具继续正常清理,需要工作人员进行弯腰手工拔取,诸如此类的杂草被称为安全区内的杂草,反之,之外的被称为安全区外的杂草。安全区可以假定为一个直径为6cm左右的圆形区域。
87.所述除草装备(即行内实时机械除草设备)的侧翼6连接在除草车本体1上,用来固定气压缸一7,气压缸一7推动除草刀10上方的连接杆8,所述连接杆8沿滑轨17移动,同时左侧小电机9带动左侧除草刀10顺时针转动,右侧除草刀9带动右侧小电机10逆时针转动,运动着的除草刀10对土壤施加压力,并切入土壤。所述北斗实时定位模块4为:北斗rtk高精度
定位模块,处理器5为:raspberry pi,且在除草车本体1上靠近车体后端的一侧设置有接收天线15,所述接受天线15用来接收遥控器的控制信号,并将其传给处理器5,再经由处理器5发出,此处属于十分成熟的现有技术,对其具体工作原理本发明中不做详细介绍。所述除草刀系统通过上述方式对经济作物的行间杂草进行清除,不仅提高行内除草效率,而且还降低了工作人员的劳动强度,节约了人力成本,同时大大减少了化学试剂对环境的污染,避免了对土壤物理性质的改变。
88.本发明中,除草时,位于除草车本体1中后方的作物识别系统实现区分杂草,从而实现对单个植株的识别,所述作物识别系统由rgb摄像机11、暗室12和卤素灯13组成,使用卤素灯13是为了防止阳光直射的负面影响,现场使用了四盏卤素灯13照明,安装在暗室12顶部的四个角,每个角各一个,所述暗箱12由遮光布组成,用来避免rgb摄像机11在识别过程中免受自然光的影响。
89.本发明中,行内实时机械除草设备沿作物行行走时,由rgb摄像机11进行拍照,发送到处理器5中进行处理,完成植株与杂草的区分,进而完成对植株的定位,定位完成后,除草刀10完成开刀和闭刀的动作,进而避开作物,实现不伤害作物的行内除草。
90.如图8所示,一种应用上述行内实时机械除草设备的除草方法,包括以下步骤:
91.s1、rgb摄像机11拍照,将图像信息传送给处理器5;
92.s2、处理器5对作物识别,进行特征提取,对安全区范围及非安全区范围进行分类;
93.s3、处理器5采用控制算法,并结合实时定位,控制两把除草刀10的左右横向移动位置;
94.处理器5结合实时定位并控制除草车本体1向前移动和两把除草刀10旋转,进行除草操作;
95.所述控制算法是:将分类后的区域用矩形框进行框选,通过掩膜覆盖后,剪裁提取出目标作物,把矩形框的中心看作主茎秆的坐标,进而控制两把除草刀10的开合,以避开作物完成除草过程。
96.上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所述领域技术人员应该明白,在本发明技术方案的基础上,本发明技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围内。
97.本说明书中未做详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1