一种反向坡自动调整机构及其控制方法与流程
1.本发明涉及公路绿化养护及园林绿化领域,具体地来说,涉及一种绿化综合养护车上的反向坡自动调整机构及其控制方法。
背景技术:
2.绿化综合养护车,是针对高速公路中间绿篱,边坡,一、二级公路绿化修剪等而专业设计和生产的一款专用养护车。工作时,调整绿化综合养护车的工作臂组和机具到达预定修剪位置,然后让汽车前行即可自动修剪,该车既省时又省力,还能保障作业人员的安全。但是,现有的绿化综合养护车在行进过程中,特别是割草机具贴附于反向坡地面进行相应操作时,如遇到上坡/地面凸起、下坡/地面凹陷情况,难以保证机具始终与地面处于适合紧贴工作状态,影响工作效率;同时,如若仅仅手动实时调整机具位置,则给施工作业带来很大的不便利性,严重影响施工效率与质量;更甚者,假如操作不及时,甚至引起车辆发生侧倾斜,出现安全事故。
3.而中国专利,公开号cn111527814a,公开一种绿化综合养护车自动浮动机构及其控制系统和方法,文中提出“浮动作业时,按下操作手柄上的主臂浮动按钮,启动割草机主臂浮动状态,两位二通电磁阀一和两位二通电磁阀二得电,使主臂油缸的有杆腔通油,主臂油缸的无杆腔通过两位二通电磁阀三连通蓄能器一和蓄能器二,此时压力传感器检测到无杆腔压力值a,通过显示控制面板上的压力设定值递增按钮和压力设定值递减按钮完成某压力定值百分比b的设定,与当前的压力传感器监测数值a进行比较,进行pid自动调整控制,通过控制液压阀组的相关动作,实时使得a=b,进而应对不同路况”。
4.该现有技术上虽然在一定程度上解决了遇到需上行爬坡或下坡时机具不能与地面适合紧贴的问题,但是无法保证机具在反向坡作业中,仍可以与反向坡地面处于适合紧贴工作状态,机具作业效果一般,同时也无法解决反向坡作业中,遇到作业面坡度不平,导致侧向支撑力过大,使车辆无法保证直线行驶,严重时使车辆侧倾,作业安全性低的技术问题。
5.为此,需要一种新的技术方案以解决上述技术问题。
技术实现要素:
6.本发明的目的在于提供一种反向坡自动调整机构及其控制方法,以解决上述背景技术中提出的绿化综合养护车在当前的反向坡作业中,遇到上坡或地面凸起、下坡或地面凹陷的情况时,机具无法始终与地面处于适合紧贴工作状态,机具作业效果一般,同时,由于坡度不平,使侧向支撑力过大,导致绿化综合养护车无法保证直线行驶,严重时甚至发生侧倾,作业安全性低的技术问题。
7.为实现上述目的,本发明采取以下技术方案:一种反向坡自动调整机构,包括设在底盘上的导轨架、设在导轨架上的移动座、设在移动座上的工作臂组、设在工作臂组上的机具、以及工作臂油缸、机具油缸、驱动马达、调
整阀组、用于控制调整阀组的电气系统,所述驱动马达、工作臂油缸及机具油缸均与调整阀组相连接,所述驱动马达用于带动移动座及工作臂组在导轨架上水平左右移动且安装在移动座上,所述工作臂油缸用于带动工作臂组及机具起升下降且连接在工作臂组与移动座之间,所述机具油缸用于带动机具左右方向倾斜且连接在机具和工作臂组之间,所述电气系统包括控制器、显示控制面板、操作手柄、以及用于测定工作臂油缸无杆腔压力值的压力传感器,所述操作手柄上设有工作臂浮动按钮、机具浮动按钮和反向坡按钮,所述显示控制面板上设有压力设定值递增按钮和压力设定值递减按钮,按动显示控制面板上的相应按钮,可通过can总线向控制器发送相应控制指令,所述控制器通过can总线接收显示控制面板、操作手柄的操作指令以及压力传感器传递的压力信号后,指示调整阀组运作。
8.进一步的,所述调整阀组包括由通过液压管路连接的主阀ⅰ、主阀ⅱ、主阀ⅲ、两位阀ⅰ、两位阀ⅱ、两位阀ⅲ、两位阀ⅳ、两位阀
ⅴ
、两位阀ⅵ、两位阀ⅶ、蓄能器、以及两个平衡阀,所述主阀ⅰ、主阀ⅱ、主阀ⅲ均为三位七通电磁阀组成,所述两位阀ⅰ、两位阀ⅱ、两位阀ⅲ、两位阀ⅳ、两位阀
ⅴ
、两位阀ⅵ及两位阀ⅶ均为两位二通电磁阀;进一步的,所述主阀ⅰ的a口和b口分别与驱动马达串联连接,两个所述平衡阀并联连接在一起后并联连接在驱动马达和主阀ⅰ之间的液压管路上,所述主阀ⅱ的a口依次与两位阀ⅲ和工作臂油缸的无杆腔串联连接,所述两位阀ⅰ并联连接在两位阀ⅲ和工作臂油缸的无杆腔之间的液压管路上,所述两位阀ⅰ依次与蓄能器和压力传感器串联连接,所述主阀ⅱ的b口与工作臂油缸的有杆腔串联连接,所述两位阀ⅱ并联连接在主阀ⅱ的b口和工作臂油缸的有杆腔之间的液压管路上,所述主阀ⅲ的a口依次与两位阀ⅶ和机具油缸的有杆腔串联连接,所述主阀ⅲ的b口依次与两位阀ⅵ和机具油缸的无杆腔串联连接,所述两位阀ⅳ和两位阀
ⅴ
串联连接,所述两位阀ⅳ并联连接在两位阀ⅶ和机具油缸的有杆腔之间的液压管路上,所述两位阀
ⅴ
并联连接在两位阀ⅵ和机具油缸的无杆腔之间的液压管路上;本发明还提供了上述反向坡自动调整机构的控制方法,首先,包括工作臂组及机具起升下降的控制方法,其具体作业过程原理如下:自动浮动作业:按下操作手柄上的工作臂浮动按钮,通过控制器启动工作臂浮动指令,两位阀ⅰ和两位阀ⅱ得电,使工作臂油缸在工作臂组及机具的自身重量g的作用下下降,此时压力传感器检测到工作臂油缸的无杆腔压力值a,通过显示控制面板上的压力设定值递增按钮和压力设定值递减按钮完成某压力定值百分比b的设定,与当前的压力传感器监测数值a进行比较,进行pid自动调整控制,实时使a=b;主动作业:当工作臂油缸的无杆腔压力值a《压力设定值b时,控制器发送控制指令,使得主阀ⅱ的电磁铁ya3和两位阀ⅲ得电,高压油从主阀ⅱ的a口进入,工作臂油缸的无杆腔充油,有杆腔泄油,使得工作臂油缸的无杆腔压力值a=压力设定值b,表现为工作臂油缸的有杆腔伸出,使得工作臂组抬起,带动机具上升;当工作臂油缸的无杆腔压力值a》压力设定值b时,控制器发送控制指令,使得主阀ⅱ的电磁铁ya4和两位阀ⅲ得电,高压油从主阀ⅱ的b口进入,工作臂油缸的有杆腔充油,无杆腔泄油,使得工作臂油缸的无杆腔压力值a=压力设定值b,表现为工作臂油缸的有杆腔缩回,使得工作臂组落下,带动机具下降;
其次,包括机具左右方向倾斜的控制方法,其具体作业过程原理如下:自动浮动作业:按下操作手柄上的机具浮动按钮,通过控制器启动机具浮动指令,使两位阀ⅳ和两位阀
ⅴ
得电,从而使机具油缸的无杆腔和有杆腔互相通油,此时受机具的重力影响,使得机具自动左右方向倾斜至与地面的坡度保持一致;主动作业:通过控制器发送控制指令,使主阀ⅲ的电磁铁ya5、两位阀ⅵ及两位阀ⅶ得电,高压油从主阀ⅲ的a口进入,从而使机具油缸的有杆腔充油,无杆腔泄油,表现为机具油缸的活塞杆缩回,实现机具的左方向倾斜;通过控制器发送控制指令,使主阀ⅲ的电磁铁ya6、两位阀ⅵ及两位阀ⅶ得电,高压油从主阀ⅲ的b口进入,从而使机具油缸的无杆腔充油,有杆腔泄油,表现为机具油缸的活塞杆伸出,实现机具的右方向倾斜;最后,包括移动座及工作臂组在导轨架上水平左右移动的控制方法,其具体作业过程原理如下:当按下操作手柄上的工作臂浮动按钮和机具浮动按钮后,机具会以压力c=g-b贴附在反向坡上,与此同时,车辆行驶,按下操作手柄的反向坡按钮,此时,工作臂浮动按钮的指令取消,控制器传达反向坡指令,即随着行驶中反向坡的坡度变化,其对机具的反支承力e同时变化,通过控制调整阀组的相关动作,实时使e=c,即:若反向坡的坡度水平,则e=c,此时工作臂组无动作,车辆保持直线行驶;若反向坡的坡度增大或凸起,则e》c,对应的工作臂油缸的无杆腔压力值a会减小,造成a《b,之后控制器传达指令,使主阀ⅰ的左侧电磁铁ya1得电,从而使驱动马达得以顺时针旋转,带动移动座及工作臂组向左侧移动,当e=c时移动结束,此时车辆保持直线行驶;若反向坡的坡度减小或凹下,则e《c,对应的工作臂油缸的无杆腔压力值a会增大,造成a》b,之后控制器传达指令,使主阀ⅰ的右侧电磁铁ya2得电,从而使驱动马达得以逆时针旋转,带动移动座及工作臂组向右侧移动,当e=c时移动结束,此时车辆保持直线行驶。
9.与现有技术相比,本发明的有益效果是:1.本发明公开一种绿化综合养护车上的反向坡自动调整机构,该反向坡自动调整机构设有用于带动工作臂组及机具起升下降的工作臂油缸、用于带动机具左右方向倾斜的机具油缸、以及用于带动移动座及工作臂组在导轨架上水平左右移动的驱动马达,通过电气系统、调整阀组与驱动马达、工作臂油缸及机具油缸三者的协同作用,使得反向坡作业中,遇到上坡或地面凸起、下坡或地面凹陷的情况时,机具仍然可以自动贴地作业,大大地提升了机具对于反向坡作业的作业效果,且机具自动贴地作业的同时工作臂组及移动座在导轨架上实时水平左右移动,避免了反向坡贴地施工作业中遇到作业面坡度不平时,作业侧向支撑力过大,使绿化综合养护车不能直线行驶,乃至发生侧倾的情况的出现,极大地提高了作业的安全性和作业效率,进一步保证了机具的作业效果;2.本发明中通过主阀ⅰ、主阀ⅱ、主阀ⅲ、两位阀ⅰ、两位阀ⅱ、两位阀ⅲ、两位阀ⅳ、两位阀
ⅴ
、两位阀ⅵ、两位阀ⅶ、蓄能器、以及两个平衡阀的协同作用,对工作臂组及机具起升下降、机具左右方向倾斜、以及移动座及工作臂组在导轨架上水平左右移动进行控制,通过高效地调整工作臂油缸的伸缩变化,从而带动工作臂组及机具起升下降,实时调节机具
的高度,通过高效地调整机具油缸的伸缩变化,从而带动机具左右方向倾斜,实时调节机具与反向坡的贴合度,最终使机具与反向坡的坡度保持一致,根据反向坡的路况,使机具自动贴地作业,进一步保证机具的作业效率和作业效果,通过高效地调整移动座及工作臂组的水平位置,从而实时调节反向坡对机具的反支承力,进一步保证机具的作业安全性;3.本发明中的蓄能器通过两位阀ⅰ与工作臂油缸的无杆腔相连,起到缓冲及减震的作用,有效地实现了整体作业的柔性化,进一步保证了作业的安全性和稳定性;同时,通过平衡阀的设置,当驱动马达不工作时,进行限压保护,强化了作业的安全性。
附图说明
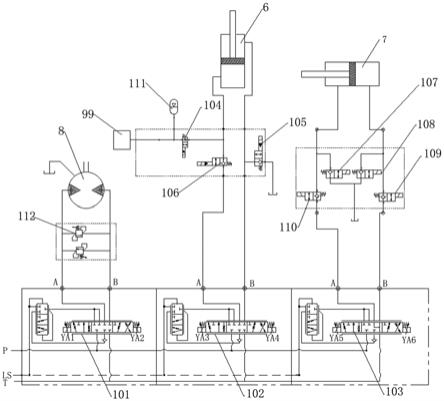
10.图1为本发明反向坡自动调整机构的工作状态示意图;图2为图1的俯视图;图3为驱动马达的工作原理示意图;图4为本发明电气系统的结构示意图一;图5为本发明电气系统的结构示意图二;图6为本发明调整阀组的工作原理示意图;图中:1、底盘,2、导轨架,3、移动座,4、工作臂组,5、机具, 6、工作臂油缸,7、机具油缸,8、驱动马达,9、电气系统,91、控制器,92、显示控制面板,93、压力设定值递增按钮,94、压力设定值递减按钮,95、操作手柄,96、工作臂浮动按钮,97、机具浮动按钮,98、反向坡按钮,99、压力传感器,10、调整阀组,101、主阀ⅰ,102、主阀ⅱ,103、主阀ⅲ,104、两位阀ⅰ,105、两位阀ⅱ,106、两位阀ⅲ,107、两位阀ⅳ,108、两位阀
ⅴ
,109、两位阀ⅵ,110、两位阀ⅶ,111、蓄能器,112、平衡阀。
具体实施方式
11.下面将结合附图,对本发明的技术方案进行清楚、完整地描述。
12.请参照图1~6所示,其示出一种反向坡自动调整机构,包括导轨架2,导轨架2安装在底盘1的前部,导轨架2上安装有移动座3,移动座3上安装有工作臂组4和驱动马达8,驱动马达8用于带动移动座3及工作臂组4在导轨架2上水平左右移动,工作臂组4的末端安装有机具5,工作臂组4和移动座3之间连接有工作臂油缸6,工作臂油缸6用于带动工作臂组4及机具5起升下降,机具5和工作臂组4之间连接有机具油缸7,机具油缸7用于带动机具5左右方向倾斜,机具油缸7、工作臂油缸6及驱动马达8均连接有调整阀组10,调整阀组10还配合设置有电气系统9;电气系统包括控制器91、显示控制面板92、操作手柄95和压力传感器99,压力传感器99用于测定工作臂油缸6的无杆腔的压力值,操作手柄95上具有工作臂浮动按钮96、机具浮动按钮97、以及反向坡按钮98,显示控制面板92上具有压力设定值递增按钮93和压力设定值递减按钮94(压力设定值递增按钮93能使压力设定值在初始设定值的基础上进行0~100%范围内的递增,每按一次,按照10%递增;压力设定值递减按钮94能使压力设定值在初始设定值的基础上进行0~100%范围内的递减,每按一次,按照10%递减,使得触地压力值变得可调整),按动显示控制面板92上的相应按钮,可通过can总线向控制器91发送相应控制指令,控制器91通过can总线接收显示控制面板92、操作手柄95的操作指令以及压力传感器99传递的压力信号后,指示调整阀组10运作;
其中,调整阀组10包括主阀ⅰ101、主阀ⅱ102、以及主阀ⅲ103,主阀ⅰ101、主阀ⅱ102和主阀ⅲ103均为三位七通电磁阀且共用进油口p、回油口t和先导反馈口ls,主阀ⅰ101的a口和b口分别与驱动马达8串联连接,驱动马达8和主阀ⅰ101之间的液压管路上并联连接有两个平衡阀112,两个平衡阀112并联连接在一起,主阀ⅱ102的a口和工作臂油缸6的无杆腔串联连接且其间串联连接有两位阀ⅲ106,两位阀ⅲ106和工作臂油缸6的无杆腔之间的液压管路上并联连接有两位阀ⅰ104,两位阀ⅰ104依次串联连接有蓄能器111和压力传感器99,蓄能器111通过两位阀ⅰ104与工作臂油缸6的无杆腔相连,起到了缓冲及减震作用,有效保证了作业柔性化,主阀ⅱ102的b口与工作臂油缸6的有杆腔串联连接,主阀ⅱ102的b口和工作臂油缸6的有杆腔之间的液压管路上并联连接有两位阀ⅱ105,主阀ⅲ103的a口和机具油缸7的有杆腔串联连接且其间串联连接有两位阀ⅶ110,两位阀ⅶ110和机具油缸7的有杆腔之间的液压管路上并联连接有两位阀ⅳ107,主阀ⅲ103的b口和机具油缸7的无杆腔串联连接且其间串联连接有两位阀ⅵ109,两位阀ⅵ109和机具油缸7的无杆腔之间的液压管路上并联连接有两位阀
ⅴ
108,两位阀ⅳ107和两位阀
ⅴ
108串联连接,两位阀ⅰ104、两位阀ⅱ105、两位阀ⅲ106、两位阀ⅳ107、两位阀
ⅴ
108、两位阀ⅵ109及两位阀ⅶ110均为两位二通电磁阀(上述各液压元件均通过液压管路连接)。
13.具体详细的操控方法为:1、工作臂组4及机具5起升下降的液压控制过程(具体可分为自动浮动作业和主动作业):自动浮动作业时,按下操作手柄95工作臂浮动按钮96通过控制器91启动工作臂浮动指令,两位阀ⅰ104和两位阀ⅱ105得电,使工作臂油缸6在工作臂组4及机具5的自身重量g的作用下下降,此时压力传感器99检测到工作臂油缸6的无杆腔压力值a,通过显示控制面板92上的压力设定值递增按钮93和压力设定值递减按钮94完成某压力定值百分比b的设定,与当前的压力传感器99的监测数值a进行比较,进行pid自动调整控制,实时使a=b;进一步的,主动作业时,当工作臂油缸6的无杆腔压力值a《压力设定值b时,控制器91发送控制指令,使得主阀ⅱ102的电磁铁ya3和两位阀ⅲ106得电,高压油从主阀ⅱ102的a口进入,工作臂油缸6的无杆腔充油,有杆腔泄油,使得工作臂油缸6的无杆腔压力值a=压力设定值b,表现为工作臂油缸6的有杆腔伸出,使得工作臂组4抬起,带动机具5上升;反之,当工作臂油缸6的无杆腔压力值a》压力设定值b时,控制器91发送控制指令,使得主阀ⅱ102的电磁铁ya4和两位阀ⅲ106得电,高压油从主阀ⅱ102的b口进入,工作臂油缸6的有杆腔充油,无杆腔泄油,使得工作臂油缸6的无杆腔压力值a=压力设定值b,表现为工作臂油缸6的有杆腔缩回,使得工作臂组4落下,带动机具5下降;2、机具5左右方向倾斜的液压控制过程(具体可分为自动浮动作业和主动作业):自动浮动作业时,按下操作手柄95上的机具浮动按钮7,通过控制器91启动机具浮动指令,使两位阀ⅳ107和两位阀
ⅴ
108得电,从而使机具油缸7的无杆腔和有杆腔互相通油,此时受机具5的重力影响,使得机具5自动左右方向倾斜至与地面的坡度保持一致;进一步的,主动作业时,通过控制器91发送控制指令,使主阀ⅲ103的电磁铁ya5、两位阀ⅵ109及两位阀ⅶ110得电,高压油从主阀ⅲ103的a口进入,从而使机具油缸7的有杆腔充油,无杆腔泄油,表
现为机具油缸7的活塞杆缩回,实现机具5的左方向倾斜;反之,通过控制器91发送控制指令,使主阀ⅲ103的电磁铁ya6、两位阀ⅵ109及两位阀ⅶ110得电,高压油从主阀ⅲ103的b口进入,从而使机具油缸7的无杆腔充油,有杆腔泄油,表现为机具油缸7的活塞杆伸出,实现机具5的右方向倾斜;3、移动座3及工作臂组4在导轨架2上水平左右移动的液压控制过程:当按下操作手柄95上的工作臂浮动按钮96和机具浮动按钮97后,机具5会以压力c=g-b贴附在反向坡上,与此同时,车辆(绿化综合养护车)行驶,按下操作手柄95的反向坡按钮98,此时,工作臂浮动按钮96的指令取消,控制器91传达反向坡指令,即随着行驶中反向坡的坡度变化,其对机具5的反支承力e同时变化,通过控制调整阀组10的相关动作,实时使e=c,即:情况一,若反向坡的坡度水平,则e=c,此时工作臂组4无动作,车辆保持直线行驶;情况二,若反向坡的坡度增大或凸起,则e》c,对应的工作臂油缸6的无杆腔压力值a会减小,造成a《b,之后控制器91传达指令,使主阀ⅰ101的左侧电磁铁ya1得电,从而使驱动马达8得以顺时针旋转,带动移动座3及工作臂组4向左侧移动,当e=c时移动结束,此时车辆保持直线行驶,因此时反支承力e减少,有效的保证了车辆的侧倾力不增大,作业稳定;情况三,若反向坡的坡度减小或凹下,则e《c,对应的工作臂油缸6的无杆腔压力值a会增大,造成a》b,之后控制器91传达指令,使主阀ⅰ101的右侧电磁铁ya2得电,从而使驱动马达8得以逆时针旋转,带动移动座3及工作臂组4向右侧移动,当e=c时移动结束,此时车辆保持直线行驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1