水稻自动插秧机
1.本技术涉及插秧机的领域,尤其是涉及水稻自动插秧机。
背景技术:
2.插秧机是将稻苗植入稻田中的一种农业机械。进行种植时,首先以机械爪从苗床中取出数株稻苗植入田中的泥土,为了保持对苗床与地面的角度为直角,机械爪的前端移动时必须采取椭圆形的动作曲线。动作是靠着旋转式或变形齿轮的行星机构来完成,前进的引擎同时可以带动这些动作机械。插秧机在泥土上行进必须有止滑的车轮及浮行设计。插苗若是成片,则是从特定的秧苗箱中取出稻苗,再以机械方式种植。
3.相关技术中的插秧机上一般设有托盘,用于存放秧苗,通过人工观察秧苗的传送通道,当传送通道上的秧苗过少时,则将托板上的秧苗转移至传送通道上,但这种方式较为耗费人力。
技术实现要素:
4.为了改善上述的问题,本技术提供水稻自动插秧机。
5.本技术提供的水稻自动插秧机采用如下的技术方案:水稻自动插秧机,包括机架,所述机架上设有用于传送秧苗的传送装置,所述传送装置包括传送板和挡板,所述传送板上放置有秧苗,所述传送板倾斜设置,以便于秧苗利用重力在传送板上滑动,所述挡板设于传送板的下方,用于阻止秧苗掉落;所述传送装置上设有存放秧苗的托板,所述托板上设有将秧苗转移至传送板上的转移机构,所述挡板上设有压力传感器,所述压力传感器与转移机构电连接。
6.通过上述技术方案,压力传感器对与挡板抵接的秧苗进行感应,当传送板上的秧苗数量过少时,则压力传感器将电信号发送至转移机构,转移机构将托板上的秧苗转移至传送板上,无需操作人员进行观察和转移,减少了人力劳动,同时便于与北斗无人驾驶系统配合,实现无人驾驶且无人看护,减少雨天插秧时,操作人员遭受风吹雨打的可能。
7.可选的,所述转移机构包括转移板、转移轴和放料件,所述托板上设有转移槽,所述转移板位于转移槽内,所述转移轴的一端与转移板的侧壁连接,另一端与转移槽的侧壁转动连接,所述放料件设于托板的底面上,所述放料件上设有第一卡块,所述第一卡块与转移板的底面抵接,所述放料件设有用于驱动第一卡块实现伸缩运动的第一驱动件,所述第一驱动件与压力传感器电连接。
8.通过上述技术方案,需要转移秧苗时,第一驱动件驱动第一卡块缩回放料件,随后转移板通过转动轴实现转动,并带动秧苗移动至传送板上,随后秧苗通过重力作用在传送板上滑动,直至与传送板上远离的秧苗抵接。
9.可选的,所述转移板的底部设有第一固定板,所述第一固定板上转动连接有第一卡板,所述第一固定板与第一卡板之间设有第一扭簧,所述第一扭簧给第一卡板施加扭力,以使所述第一卡板翻转并与转移板的侧壁抵接。
10.通过上述技术方案,在转移板转动固定过程中,第一扭簧使得第一卡板转动并与转移板远离转动轴的侧壁抵接,进而便于对转移板上的秧苗进行支撑,减少秧苗在转移板转移过程中就掉落的可能。
11.可选的,所述转移板远离转动轴的一端的底边与转动轴间的距离小于转移板远离转动轴一端的顶边与转动轴之间的距离,所述转移板的底面与第一卡块的顶面抵接时,所述第一卡板与托板的底面抵接。
12.通过上述技术方案,转移板远离转动轴的一端的底边与转动轴间的距离小于转移板远离转动轴一端的顶边与转动轴之间的距离,使得第一卡板在与转移板的侧壁抵接时,第一卡板处于倾斜状态。当转移板与传送板接近时,第一卡板先与传送板抵接,并被克服第一扭簧的扭力而转动至于转移板平行的状态,进而便于秧苗滑落至传送板上。当转移板复位时,第一卡板也先与托板的底面抵接,并转动至与转移板平行的状态。
13.可选的,所述托板的高度自托板朝向传送板的方向逐渐减小,所述托板上设有防掉组件;所述防掉组件包括第二卡板、第一齿轮和第一齿条,所述托板上转动连接有第一转轴,所述第一齿轮同轴设于第一转轴上,所述托板的底部滑动连接有移动块,所述移动块与第一齿条连接,所述第一齿条与第一齿轮啮合,所述托板底部设有第一工作板,所述第一工作板与移动块之间设有第一压缩弹簧,所述第二卡板与第一转轴连接,所述第一卡板与托板的底面抵接时,所述第一卡板与移动块抵接;所述第一卡板与移动块分离时,所述第二卡板与机架的宽度方向平行,所述第一卡板与托板的底面抵接且平行时,所述第二卡板与机架的长度方向平行。
14.通过上述技术方案,转移板朝向传送板转动时,第一卡板与托板的底面脱离抵接,此时第一压缩弹簧的弹力使得移动块朝向转移板移动,带动第一齿条朝向转移板移动,第一齿条再带动第一齿轮转动,使得第二转动至与机架的宽度方向平行的状态,便于阻挡托板上的秧苗滑落。当转移板复位时,第一卡板与托板的底面抵接,并推动移动块朝向远离转移板的方向移动,使得第二卡板转动至与机架长度方向平行的状态,此时秧苗可利用重力沿着托板滑动至转移板上。
15.可选的,所述转动轴上同轴设有第二齿轮,所述托板上沿机架的长度方向滑动有第二齿条,所述第二齿轮与第二齿条啮合,所述机架上沿机架的长度方向滑动有滑动块,所述滑动块与第二齿条连接,所述机架上转动连接有两个第一同步轮,两个所述第一同步轮上设有第一同步带,所述第一同步带外表面上设有第一卡槽,所述第一卡槽沿第一同步带的长度方向设有若干个,所述机架上设有带动第一同步轮转动的第二驱动件,所述滑动块上设有复位件,所述复位件上设有第二卡块,所述复位件上设有驱动第二卡块插入第一卡槽的第三驱动件,所述第三驱动件与压力传感器电连接。
16.通过上述技术方案,当压力传感器检测到秧苗重量大幅增加时,第三驱动件驱动第二卡块插入第一卡槽,随后第一同步带带动第二卡块朝向远离托板的方向移动,第二卡块带动滑动块移动,滑动块再带动第二齿条移动,第二齿条则带动第二齿轮转动,进而通过转动轴带动转移板转动,便于实现转移板的复位。当第二卡块移动至不与第一同步带接触时,转移板压刚好完全复位。
17.可选的,所述机架上沿自身的宽度方向转动连接有第二转轴和第三转轴,所述第
二转轴上设有两个驱动轮,所述第三转轴上设有两个从动轮,所述机架上设有用于驱动第一转轴转动的发动机;所述机架上设有驱动传送板沿机架的宽度方向移动的移动机构,所述移动机构与第三转轴连接,所述机架上还设有插秧装置,所述插秧装置与第三转轴连接。
18.通过上述技术方案,发动机带动第二转轴转动,第二转轴带动驱动轮转动,驱动轮转动再带动从动轮转动,从动轮则带动第三转轴转动,进而带动传送板往复移动,且带动插秧装置进行插秧。
19.可选的,所述插秧装置包括固定杆和第四转轴,所述固定杆连接于挡板上,所述第四转轴沿机架的宽度方向设置,且与固定杆转动连接,所述第四转轴上连接有驱动杆,所述驱动杆上转动连接有插秧杆,所述挡板上还连接有支撑杆,所述支撑杆上转动连接有连杆,所述连杆与插秧杆转动连接,所述第四转轴和第三转轴上均同轴设有第二同步轮,两个所述第二同步轮上设有第二同步带,所述挡板上设有插秧缺口,所述插秧杆摆动时,自所述插秧缺口内穿过。
20.通过上述技术方案,插秧时,第三转轴转动,带动第四转轴转动,第四转轴带动驱动杆转动,驱动杆则带动插秧杆往复摆动,插秧杆在往复摆动的过程中,先自插秧缺口的上方穿过插秧缺口,并带动一束秧苗下移,将秧苗插入泥土里,随后插秧杆朝向上方摆动,回到原来的位置,如此往复,实现持续插秧。
21.可选的,所述移动机构包括相互配合的曲柄和槽轮,所述机架上设有第一支撑板,所述第一支撑板上转动连接有第三同步轮,所述第三同步轮与第二同步带啮合,所述第三同步轮与曲柄同轴连接,所述第一支撑板上连接有第二支撑板,所述槽轮转动连接于第二支撑板上,所述槽轮上同轴连接有转盘,所述转盘上连接有拨动杆,所述第二支撑板上转动连接有摆动杆,所述摆动杆上沿自身长度方向设有滑移槽,所述滑移槽套于拨动杆上,所述摆动杆远离转盘的一端设有扇形齿轮,所述传送板上设有第三齿条,所述第三齿条与扇形齿轮啮合,所述传送板沿机架的宽度方向与机架滑动连接。
22.通过上述技术方案,第二同步带转动的同时,带动第三同步轮转动,第三同步轮则带动曲柄转动,曲柄再带动槽轮转动,槽轮则带动转盘转动,转盘再带动摆动杆往复摆动,摆动杆带动扇形齿轮往复转动,扇形齿轮再带动第三齿条往复移动,进而带动传送板沿着机架的宽度方向往复移动,便于切换不同位置的秧苗到插秧缺口处,便于实现均匀插秧。
23.可选的,所述第二驱动件与包括第四同步轮和第四同步带,所述第四同步轮同轴设于第三转轴上,所述第四同步带同时套于第一同步轮和第四同步轮上。
24.通过上述技术方案,第三转轴转动,便于带动第四同步带移动,进而带动第一同步轮转动。
25.综上所述,本技术包括以下至少一种有益技术效果:通过压力传感器和转移机构的设置,便于对传送板上的秧苗数量进行监测,并在秧苗较少时自动补充秧苗,减少人力劳动,同时便于与北斗无人驾驶系统配合,实现无人驾驶且无人看护;通过第一卡板、第一扭簧、移动块、第一压缩弹簧、第一齿条、第一齿轮和第二卡板的设置,第一卡板便于在转移板朝向传送板转动时,在第一扭簧的作用下阻止转移板上的秧苗自转移板上滑落,同时第二卡板便于在第一压缩弹簧的作用下阻止托板上的秧苗滑落
的可能,当转移板复位时,第一卡板又可驱动第二卡板不再阻挡托板上的秧苗,便于托板上的秧苗转移至转移板上,便于实现持续补料。
附图说明
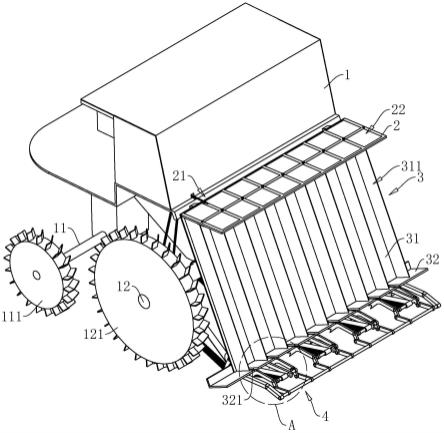
26.图1是本技术实施例中体现整体的结构示意图。
27.图2是图1中a部的局部放大图。
28.图3是本技术实施例中体现移动机构的结构示意图。
29.图4是本技术实施例中体现曲柄和槽轮的结构示意图。
30.图5是本技术实施例中体现转盘和拨动杆的结构示意图。
31.图6是本技术实施例中体现转移机构的结构示意图。
32.图7是图6中b部的局部放大图。
33.图8是本技术实施例中体现第一卡板、第一工作板、第一压缩弹簧、移动块、第一齿轮和第一齿条的结构示意图。
34.图9是本技术实施例中体现滑动块、第一同步带、第一同步轮、复位件和第二卡块的结构示意图。
35.附图标记说明:1、机架;11、第二转轴;111、驱动轮;12、第三转轴;121、从动轮;13、滑动块;131、燕尾槽;132、复位件;1321、第二卡块;14、第一同步轮;141、第一同步带;1411、第一卡槽;142、第四同步带;143、第四同步轮;2、托板;21、转移机构;211、转移板;212、转动轴;2121、第二齿轮;2122、第二齿条;2123、燕尾块;22、存放区;23、放料件;231、第一马达;232、第一滑槽;2321、第二压缩弹簧;233、第一卡块;2331、斜面;234、牵引绳;24、第一固定板;241、第一卡板;242、扭簧;25、防掉组件;251、移动块;252、第二卡板;253、第一齿轮;254、第一齿条;255、第一转轴;256、第一工作板;257、第一压缩弹簧257;3、传送装置;31、传送板;311、传送通道;32、挡板;321、插秧缺口;4、插秧装置;41、固定杆;42、第四转轴;421、第二同步轮;422第、二同步带;423、驱动杆;424、插秧杆;4241、插秧槽;425、支撑杆;4251、连杆;5、移动机构;51、曲柄;511、拨杆;512、静止轮;52、槽轮;521、转动槽;522、静止槽;53、转盘;531、拨动杆;54、第一支撑板;541、第二支撑板;542、第三同步轮;55、摆动杆;551、滑移槽;552、扇形齿轮;553、第三齿条。
具体实施方式
36.以下结合附图1-9对本技术作进一步详细说明。
37.实施例:本技术公开水稻自动插秧机。参照图1,水稻自动插秧机包括机架1,机架1上设有托板2、转移机构21、传送装置3和插秧装置4,托板2用于存放秧苗,转移机构21用于将秧苗转移至传送装置3上,传送装置3用于传送秧苗,并配合插秧装置4实现插秧。
38.参照图1,机架1上沿自身的宽度方向转动连接有第二转轴11和第三转轴12,第二转轴11上同轴固定有两个驱动轮111,第三转轴12上则同轴固定有两个从动轮121,机架1上还固定连接有用于驱动第二转轴11转动的发动机。传送装置3包括传送板31和挡板32,传送板31沿机架1的宽度方向与机架1滑动连接,挡板32与机架1固定连接,且设于传送板31的底部。传送板31倾斜设置,传送板31的底部与第三转轴12之间的距离大于传送板31的顶部与
第三转轴12之间的距离,便于秧苗在传送板31上依靠重力实现自动传送。
39.传送通道311上沿机架1的宽度方向设有多个传送通道311,每个传送通道311上均可放置一份秧苗,挡板32上开设有插秧缺口321,插秧缺口321的数量与传送通道311的数量相等,每个插秧缺口321与一个传送通道311对应,便于插秧装置4将秧苗自插秧缺口321带走。
40.参照图1和图2,插秧装置4包括固定杆41和第四转轴42,固定杆41固定连接于挡板32上,第四转轴42沿机架1的宽度方向设置,且与固定杆41转动连接。第四转轴42和第三转轴12上均同轴固定连接有第二同步轮421,两个第二同步轮421上套设有同一个第二同步带422第。第四转轴42上固定连接有驱动杆423,驱动杆423上则转动连接有插秧杆424。挡板32上还固定连接有支撑杆425,支撑杆425上转动连接有连杆4251,连杆4251则与插秧杆424转动连接。插秧杆424靠近挡板32的一端设有插秧槽4241,便于卡住秧苗,并带动秧苗移动。
41.工作时,发动机带动第二转轴11转动,第二转轴11带动驱动轮111转动,驱动轮111转动再带动从动轮121转动,从动轮121则带动第三转轴12转动,第三转轴12转动,带动第四转轴42转动,第四转轴42带动驱动杆423转动,驱动杆423则带动插秧杆424往复摆动,插秧杆424在往复摆动的过程中,插秧槽4241先自插秧缺口321的上方穿过插秧缺口321,并带动一束秧苗下移,将秧苗插入泥土里,随后插秧杆424朝向上方摆动,回到原来的位置,如此往复,实现持续插秧。在插秧时,驱动杆423与插秧杆424的交界处位于驱动杆423靠近挡板32的一侧,而在复位时,驱动杆423与插秧杆424的交界处位于驱动杆423远离挡板32的一侧,故插秧杆424在复位时不会与传送通道311内的秧苗产生干涉。
42.每个驱动杆423上设有两个插秧杆424,对应两个插秧缺口321,即每组插秧装置4可对两个传送通道311内的秧苗进行转移,故一般情况下插秧装置4的数量为传送通道311的数量的一半。
43.参照图3和图4,机架1上设有移动机构5,移动机构5包括相互配合的曲柄51和槽轮52,机架1上固定连接有第一支撑板54,第一支撑板54上转动连接有第三同步轮542,第三同步轮542与第二同步带422第啮合,便于受第二同步带422第的驱动。第三同步轮542与曲柄51同轴连接,第一支撑板54上连接有第二支撑板541,槽轮52转动连接于第二支撑板541上。曲柄51上固定连接有拨杆511,槽轮52上则开设有转动槽521,转动槽521用于供拨杆511插入,并带动槽轮52转动,转动槽521沿槽轮52的周向阵列有多个,本实施例中为6个。曲柄51上还固定静止轮512,槽轮52上设有与静止轮512相配合的静止槽522,当拨杆511脱离转动槽521时,静止轮512则与静止槽522相配合,使得槽轮52保持静止状态。
44.参照图4和图5,槽轮52上同轴固定连接有转盘53,转盘53上固定连接有拨动杆531,第二支撑板541上还转动连接有摆动杆55,摆动杆55上沿自身长度方向开设有滑移槽551,滑移槽551套于拨动杆531上。摆动杆55远离转盘53的一端固定连接有扇形齿轮552,扇形齿轮552与摆动杆55的转动中心同轴线,传送板31上固定连接有第三齿条553,第三齿条553与扇形齿轮552啮合。
45.工作时,第二同步带422第转动带动第三同步轮542转动,第三同步轮542则带动曲柄51转动,曲柄51再带动槽轮52转动,槽轮52则带动转盘53转动,转盘53再带动摆动杆55往复摆动,摆动杆55带动扇形齿轮552往复转动,扇形齿轮552再带动第三齿条553往复移动,进而带动传送板31沿着机架1的宽度方向往复移动,便于切换不同位置的秧苗到插秧缺口
321处,便于实现均匀插秧。同时槽轮52的静止状态也可便于插秧杆424实现插秧,减少插秧杆424与传送板31同时处于运动状态而对秧苗造成损坏的可能。
46.托板2与传送板31的顶部固定连接,托板2位于传送板31的上方,托板2上沿机架1的宽度方向设有多个存放区22,存放区22的数量与传送通道311的数量相等,且沿竖直方向与传送通道311一一对应。托板2上设有转移机构21,转移机构21便于将托板2上的秧苗转移至传送通道311上。转移机构21包括转动轴212和转移板211,转动轴212沿机架1的宽度方向贯穿转移板211,并与转移板211固定连接,托板2上开设有转移槽,转移板211位于转移槽内,转动轴212与转移槽的侧壁转动连接。
47.参照图6和图7,托板2的高度自托板2朝向传送板31的方向逐渐降低,便于秧苗依靠重力移动至转移板211上。托板2的底面上固定连接有放料件23,放料件23朝向转移板211的侧壁上开设有第一滑槽232,第一滑槽232内滑动有第一卡块233,第一滑槽232内设有第二压缩弹簧2321,第二压缩弹簧2321的一端与第一滑槽232远离转移板211的一端抵接,另一端与第一卡块233远离转移板211的一端抵接。放料件23上还设有第一驱动件,第一驱动件包括第一马达231,第一马达231固定连接于放料件23上,第一马达231的输出轴上固定连接有牵引绳234,牵引绳234远离第一马达231的一端与第一卡块233远离转移板211的一端固定连接。第一卡块233处于伸出状态时,第一卡块233的顶面与转移板211远离转动轴212的一端的底面抵接。
48.挡板32内固定连接有压力传感器,压力传感器与第一马达231电连接,当压力传感器检测到传送通道311上的秧苗不足一份的四分之一时,给第一马达231发出电信号,使得第一马达231启动,第一马达231启动,收卷牵引绳234,牵引绳234拉动第一卡块233缩回第一滑槽232。第一卡块233缩回后,转动板在重力的作用下带动秧苗朝向传送板31转动,并与传送板31抵接,便于秧苗依靠重力落于传送通道311内。转动板转动后,第一马达231停止运行,第一卡块233在第二压缩弹簧2321的作用下复位。
49.参照图8,转移板211的底部固定连接有第一固定板24,第一固定板24上转动连接有第一卡板241,第一固定板24与第一卡板241之间连接 有第一扭簧242,第一扭簧242给第一卡板241施加扭力,以使第一卡板241翻转并与转移板211的侧壁抵接,进而便于对转移板211上的秧苗进行支撑,减少秧苗在转移板211转移过程中就掉落的可能。
50.转移板211远离转移轴的侧壁倾斜设置,转移板211远离转动轴212的侧壁的底边与转动轴212间的距离小于转移板211远离转动轴212一端的侧壁与转动轴212之间的距离,使得转移板211远离转轴的侧壁与第一卡板241的顶面抵接时,第一卡板241也倾斜设置。在转移板211与传送板31将要抵接时,第一卡板241先与传送板31抵接,并被克服第一扭簧242的扭力而转动至于转移板211平行的状态,进而便于秧苗滑落至传送板31上。当转移板211复位时,第一卡板241也先与托板2的底面抵接,并转动至与转移板211平行的状态,减少与托板2发生干涉的可能。
51.参照图2和图8,托板2上设有防掉组件25,防掉组件25包括第二卡板252、第一齿轮253和第一齿条254,托板2上转动连接有第一转轴255,第一齿轮253同轴固定于第一转轴255上,托板2的底部滑动连接有移动块251,移动块251与第一齿条254固定连接,第一齿条254与第一齿轮253啮合。托板2底部固定连接有第一工作板256,第一工作板256与移动块251之间固定连接有第一压缩弹簧257,第二卡板252与第一转轴255的顶部固定连接。
52.转移板211朝向传送板31转动时,第一卡板241与托板2的底面脱离抵接,此时第一压缩弹簧257的弹力使得移动块251朝向转移板211移动,带动第一齿条254朝向转移板211移动,第一齿条254再带动第一齿轮253转动,使得第二转动至与机架1的宽度方向平行的状态,便于阻挡托板2上的秧苗滑落。当转移板211复位时,第一卡板241与托板2的底面抵接,并推动移动块251朝向远离转移板211的方向移动,使得第二卡板252转动至与机架1长度方向平行的状态,此时秧苗可利用重力沿着托板2滑动至转移板211上。每个存放区22对应两个第一卡板241和第二卡板252,位于存放区22沿机架1宽度方向的两端。
53.参照图6和图9,转动轴212上同轴设有第二齿轮2121,托板2上沿机架1的长度方向滑动连接有第二齿条2122,第二齿轮2121与第二齿条2122啮合。机架1上沿机架1的长度方向滑动有滑动块13,第二齿条2122朝向滑动块13的一端固定连接有燕尾块2123,滑动块13上沿机架1的宽度方向开设有燕尾槽131,燕尾块2123滑动于燕尾槽131内。为减少燕尾块2123与燕尾槽131之间的摩擦力,燕尾块2123表面设置若干的滚珠。
54.参照图3和图9,机架1上转动连接有两个第一同步轮14,两个第一同步轮14均沿机架1的宽度方向设置。两个第一同步轮14上套设有同一个第一同步带141,第一同步带141外表面上开设有第一卡槽1411,第一卡槽1411沿第一同步带141的长度方向阵列有若干个。机架1上第二驱动件,第二驱动件包括第四同步轮143和第四同步带142,第四同步轮143同轴固定于第三转轴12上,第四同步带142则同时套设于第四同步轮143和其中一个第一同步轮14上,便于第三转轴12转动而带动第一同步轮14转动。滑动块13位于第一同步带141的上方,滑动块13上固定连接有复位件132,复位件132朝向第一同步带141的一端开设有第二滑槽,第二滑槽内滑动连接有第二卡块1321。复位件132上设有第三驱动件,第三驱动件包括第二马达,第二马达固定连接于复位件132内,第二马达的输出轴与第二卡块1321螺纹连接。第二马达与压力传感器电连接。
55.当压力传感器检测到传送通道311内的秧苗数量大于一份秧苗的数量时,给第二马达发出电信号,第二马达启动,带动第二卡块1321移动,使得第二卡块1321插入第一卡槽1411,随后第一同步带141带动第二卡块1321朝向远离托板2的方向移动,第二卡块1321带动滑动块13移动,滑动块13再带动第二齿条2122移动,第二齿条2122则带动第二齿轮2121转动,进而通过转动轴212带动转移板211转动,便于实现转移板211的复位。当第二卡块1321移动至不与第一同步带141接触时,转移板211压刚好完全复位。转移板211复位后,第二马达的输出轴反转,使得第二卡块1321复位。在转移板211朝向传送板31转动的同时,第二齿轮2121拉动第二齿条2122移动,进而带动滑动块13复位。
56.参照图7,第一卡块233靠近转移板211的一端开设有斜面2331,斜面2331朝向传送板31设置,当转移板211复位时,转移板211与斜面2331抵接,通过斜面2331将第一卡块233压回第一滑槽232,当转移板211复位后,第一卡块233在第二压缩弹簧2321的作用伸出,并与转移板211的底面抵接,以进行支撑。
57.本技术实施例水稻自动插秧机的实施原理为:插秧时,发动机带动第二转轴11转动,第二转轴11带动驱动轮111转动,驱动轮111转动再带动从动轮121转动,从动轮121则带动第三转轴12转动,第三转轴12转动,带动第四转轴42转动,第四转轴42带动驱动杆423转动,驱动杆423则带动插秧杆424往复摆动,插秧杆424在往复摆动的过程中,插秧槽4241先自插秧缺口321的上方穿过插秧缺口321,并带动一束秧苗下移,将秧苗插入泥土里,随后插
秧杆424朝向上方摆动,回到原来的位置,如此往复,实现持续插秧。
58.第二同步带422第带动第四转轴42转动的同时,还带动第三同步轮542转动,第三同步轮542则带动曲柄51转动,曲柄51再带动槽轮52转动,槽轮52则带动转盘53转动,转盘53再带动摆动杆55往复摆动,摆动杆55带动扇形齿轮552往复转动,扇形齿轮552再带动第三齿条553往复移动,进而带动传送板31沿着机架1的宽度方向往复移动,便于切换不同位置的秧苗到插秧缺口321处,便于实现均匀插秧。同时槽轮52的静止状态也可便于插秧杆424实现插秧,减少插秧杆424与传送板31同时处于运动状态而对秧苗造成损坏的可能。
59.当压力传感器检测到传送通道311上的秧苗不足一份的四分之一时,给第一马达231发出电信号,使得第一马达231启动,第一马达231启动,收卷牵引绳234,牵引绳234拉动第一卡块233缩回第一滑槽232。第一卡块233缩回后,转动板在重力的作用下带动秧苗朝向传送板31转动,并与传送板31抵接,便于秧苗依靠重力落于传送通道311内。
60.秧苗落于传送通道311,并与传送通道311原有的秧苗抵接时,压力传感器检测到传送通道311内的秧苗数量大于一份秧苗的数量,此时给第二马达发出电信号。第二马达启动,带动第二卡块1321移动,使得第二卡块1321插入第一卡槽1411,随后第一同步带141带动第二卡块1321朝向远离托板2的方向移动,第二卡块1321带动滑动块13移动,滑动块13再带动第二齿条2122移动,第二齿条2122则带动第二齿轮2121转动,进而通过转动轴212带动转移板211转动,随着转移板211的转动,转移板211与斜面2331抵接,通过斜面2331将第一卡块233压回第一滑槽232,当转移板211复位后,第一卡块233在第二压缩弹簧2321的作用下伸出,并与转移板211的底面抵接,以对转移板211进行支撑。
61.此时,第一卡板241与托板2的底面抵接,并推动移动块251朝向远离转移板211的方向移动,使得第二卡板252转动至与机架1长度方向平行的状态,不再对秧苗进行阻挡,便于秧苗利用重力沿着托板2滑动至转移板211上,为下一次的秧苗转移做好准备。
62.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1