一种黄花菜采摘机器人
1.本实用新型属于机器人技术领域,特别是涉及一种黄花菜采摘机器人。
背景技术:
2.黄花菜,又名金针菜、忘忧草,因其独特的营养价值深受人们喜欢,一些黄花菜精品还会远销海外,黄花菜的采摘工作比较麻烦,大都是人工采摘,要在每天短时间内将成熟的黄花菜都采摘下,因此使用黄花菜采摘机器人帮助完成采摘工作,但它在实际使用中仍存在以下弊端:
3.1、现有的黄花菜采摘机器人的部分结构不太完善,有可能将黄花菜根部的筋抽丝,使得营养流失,并且大多数机器人注重采摘过程,忽视了收集过程,从而不便于将采摘下来的黄花菜进行收集;
4.2、现有的黄花菜采摘机器人将黄花菜采摘后,不能很好的将黄花菜进行收集整理,大量的黄花菜集中在一个收集箱中,容易将底部的黄花菜压实导致腐坏,从而造成了经济的流失。
5.因此,现有的黄花菜采摘机器人,无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
技术实现要素:
6.本实用新型的目的在于提供一种黄花菜采摘机器人,通过设置了采摘和收集一体的结构和收集箱,解决了现有的不便于很好的将黄花菜割下和收集,黄花菜在收集箱中容易被压坏的问题。
7.为解决上述技术问题,本实用新型是通过以下技术方案实现的:
8.本实用新型为一种黄花菜采摘机器人,包括工作台、输送机构和采摘机构,所述工作台的上端面前部连接有调节机构,所述调节机构的顶端固定连接有输送机构,所述工作台的上端面后部固定连接有收集箱,所述输送机构的上端面前部固定连接有采摘机构。
9.进一步地,所述工作台的上端面靠近调节机构的右侧固定连接有控制箱,所述工作台的底端连接有履带行走机构,所述工作台上端面靠近调节机构的前部的凹槽内固定连接有第一电机,所述第一电机顶部的转轴固定连接有驱动齿轮,控制箱可以接收智能平台的信号,调节启动各个电器元件,并且控制各电器元件进行工作,履带行走机构可以使得该采摘机器人移动工作,第一电机和驱动齿轮可以使得调节机构改变方向。
10.进一步地,所述调节机构包括转盘轴承、固定盘和伸缩杆,所述工作台的上端面固定连接有转盘轴承,且转盘轴承的外圈与驱动齿轮啮合,所述转盘轴承的上端面固定连接有固定盘,所述固定盘上端面的外侧固定连接有伸缩杆,且伸缩杆沿固定盘的圆心圆周阵列分布,所述固定盘的上端面中部固定连接有液压杆,所述液压杆的顶端与输送机构固定连接,转盘轴承可以让调节机构转动,液压杆的伸缩可以控制输送机构的高度,伸缩杆可以将固定盘稳定住。
11.进一步地,所述输送机构包括安装台和皮带伸缩输送机,所述安装台与液压杆的顶端固定连接,且安装台的底端与伸缩杆固定连接,所述安装台的上端面固定连接有皮带伸缩输送机,所述皮带伸缩输送机的外部活动连接有传送带,所述滑块连接在隔板的两侧,皮带伸缩输送机可以将自身伸长,皮带可以将黄花菜进行输送。
12.进一步地,所述收集箱的两内部开设有滑槽,所述滑槽内通过滑块滑动连接有隔板,滑槽和滑块的配合可以让隔板牢固地安装在收集箱中。
13.进一步地,所述采摘机构包括智能平台和定位块,所述智能平台固定连接在皮带伸缩输送机最顶部的伸缩台上,所述智能平台的前端固定连接有定位块,所述定位块的内部通过销轴转动连接有夹臂,所述定位块内部的销轴顶端固定连接有从动齿轮,所述从动齿轮与主动齿轮啮合,所述智能平台上端面的前端固定连接有第二电机,所述第二电机顶部的转轴与主动齿轮连接,所述智能平台的底端固定连接有电动推杆,所述电动推杆的前端固定连接有刀片,定位块可以将夹臂进行限位并转动连接,通过主动齿轮和从动齿轮的配合可以使得夹臂转动,电动推杆可以带动刀片进行运动。
14.本实用新型具有以下有益效果:
15.1、本实用新型通过设置了采摘机构和输送机构,便于将黄花菜的根部割下不容易使得根部的筋抽丝,更好的留住了黄花菜的营养成分,不破坏枝条,并且可以通过输送机构将黄花菜输送到收集箱中,在提高采摘效率的同时也降低了人的劳动强度。
16.2、本实用新型通过设置了收集箱,可以将黄花菜分层收集,便于人工拿取和后期的运输,使得黄花菜的本体不容易压坏,提高了黄花菜的品质和经济效益,同时也完成了收集功能。
17.当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
18.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
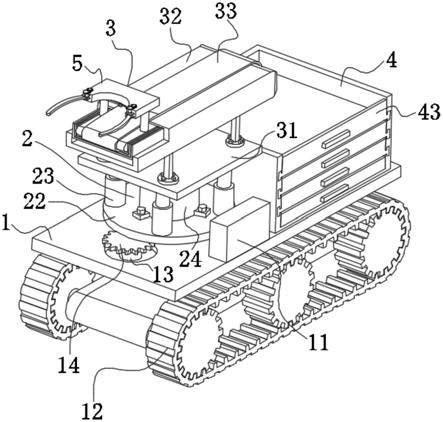
19.图1为本实用新型整体结构示意图;
20.图2为本实用新型第一电机与调节机构的连接图;
21.图3为本实用新型采摘机构的仰角视图;
22.图4为本实用新型图3中的a部放大结构图;
23.图5为本实用新型收集箱的内部结构图。
24.附图中,各标号所代表的部件列表如下:
25.1、工作台;11、控制箱;12、履带行走机构;13、第一电机;14、驱动齿轮;2、调节机构;21、转盘轴承;22、固定盘;23、伸缩杆;24、液压杆;3、输送机构;31、安装台;32、皮带伸缩输送机;33、传送带;4、收集箱;41、滑槽;42、滑块;43、隔板;5、采摘机构;51、智能平台;52、定位块;53、夹臂;54、从动齿轮;55、主动齿轮;56、第二电机;57、电动推杆;58、刀片。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
27.请参阅图1
‑
5所示,本实用新型为一种黄花菜采摘机器人,包括工作台1、输送机构3和采摘机构5,工作台1的上端面前部连接有调节机构2,调节机构2的顶端固定连接有输送机构3,工作台1的上端面后部固定连接有收集箱4,输送机构3的上端面前部固定连接有采摘机构5。
28.其中如图1
‑
4所示,工作台1的上端面靠近调节机构2的右侧固定连接有控制箱11,工作台1的底端连接有履带行走机构12,工作台1上端面靠近调节机构2的前部的凹槽内固定连接有第一电机13,第一电机13为ye系列低速电机,该系列为市场上常见的系列,在此不做过多叙述,第一电机13顶部的转轴固定连接有驱动齿轮14,调节机构2包括转盘轴承21、固定盘22和伸缩杆23,工作台1的上端面固定连接有转盘轴承21,且转盘轴承21的外圈与驱动齿轮14啮合,转盘轴承21的上端面固定连接有固定盘22,固定盘22上端面的外侧固定连接有伸缩杆23,且伸缩杆23沿固定盘22的圆心圆周阵列分布,固定盘22的上端面中部固定连接有液压杆24,液压杆24的顶端与输送机构3固定连接,输送机构3包括安装台31和皮带伸缩输送机32,安装台31与液压杆24的顶端固定连接,且安装台31的底端与伸缩杆23固定连接,安装台31的上端面固定连接有皮带伸缩输送机32,皮带伸缩输送机32的外部活动连接有传送带33,采摘机构5包括智能平台51和定位块52,智能平台51固定连接在皮带伸缩输送机32最顶部的伸缩台上,智能平台51的前端固定连接有定位块52,定位块52的内部通过销轴转动连接有夹臂53,定位块52内部的销轴顶端固定连接有从动齿轮54,从动齿轮54与主动齿轮55啮合,智能平台51上端面的前端固定连接有第二电机56,第二电机56的型号为af60
‑
l1,该型号为市场上常见的型号,在此不做过多叙述,第二电机56顶部的转轴与主动齿轮55连接,智能平台51的底端固定连接有电动推杆57,电动推杆57的前端固定连接有刀片58,使用时,通过履带行走机构12将该采摘机器人移动到黄花菜田里的合适位置,然后通过工作台1上的控制箱11启动输送机构3,皮带伸缩输送机32进行伸长将采摘机构5移送到黄花菜的枝芽前,智能平台51上的图像传感器识别黄菜后,经过数据分析器的分析,将信号传送给控制箱11,控制箱11调节各电器元件的配合操作进行采摘,第二电机56启动带动主动齿轮55转动,使得从动齿轮54转动,带动两个夹臂53在定位块52上向内侧转动,将一些黄花菜夹在智能平台51和两个夹臂53的圈内,然后电动推杆57启动,带动刀片58对黄花菜的枝芽根部进行割动,并将黄花菜割下,掉落在传送带33上,通过传送带33进行输送,当调节采摘机构5的方向和高度时,第一电机13启动,带动驱动齿轮14转动,使得转盘轴承21转动,从而固定盘22转动,带动了输送机构3和采摘机构5整体转动调节方向,在采摘的过程中,根据黄花菜的高度不一略做调整时,液压杆24启动,将安装台31上升或下降,伸缩杆23的长度增加或降低,使得输送机构3和采摘机构5整体的高度改变,从而摘取不同高度的黄花菜。
29.其中如图1和图5所示,收集箱4的两内部开设有滑槽41,滑槽41内通过滑块42滑动连接有隔板43,滑块42连接在隔板43的两侧,当采摘机构5将黄花菜采摘后,通过输送机构3进行移送,黄花菜落在传送带33上,到达传送带33的末端后,掉落在收集箱4中的最底层上,最底层装满后,在滑槽41中插入隔板43,通过隔板43上的滑块42将隔板43卡在收集箱4内,并继续收集,隔板43装满后,再插入下一个隔板43继续收集。
30.本实施例的一个具体应用为:使用时将该采摘机器人移动到黄花菜田地里,通过控制箱11调节各电器元件之间的配合进行采摘工作,在采摘时通过调节机构2来调节采摘机构5和输送机构3的角度和高度,通过采摘机构5将黄花菜割下掉落在输送机构3上,然后落在收集箱4中,隔板43装满后再换下一个隔板43,当收集箱4装满后,工作人员可以将收集箱4取下进行装车,并且换上下一个收集箱4继续进行收集。
31.以上仅为本实用新型的优选实施例,并不限制本实用新型,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1