一种胡萝卜收获机的制作方法
1.本实用新型涉及农业机械领域,具体为一种胡萝卜收获机。
背景技术:
2.我国的胡萝卜种植面积接近世界胡萝卜总种植面积的40%,总产量约占世界总产量的1/3,是世界第一大胡萝卜生产国,但收获机械化及自动化程度低,仍以传统人工收获方式为主,需要大量人力,耗时、耗材、耗力,收获效率低已经成为限制胡萝卜产业种植效益提升的瓶颈。虽然已有引进国外的一体化收获机,能实现挖掘、输送、根叶分离等工作,但由于我国地缘辽阔、地形复杂,加上国内农艺要求不规范等问题,从国外引进的大型胡萝卜收获机械不能很好满足国内的需求;而国内自主研制的胡萝卜收获机,虽然有振动、输送、茎叶切割功能,能在一定程度上提高生产效率,但存在设计复杂收获不稳定的缺点,且难以避免机具与胡萝卜肉质根之间的碰触和摩擦,造成肉质根表皮受损,不能用于长期冷藏贮存。
3.中国实用新型专利(cn209861605u)公开了一种胡萝卜收获机,不损坏胡萝卜肉质以及根,可调节犁铲之间的宽度以适应收获需要,提高收获效率。然而其采用从胡萝卜根部将土壤连续铲起,并从后方自然落下,经底部挡管阻挡缓冲,具有破碎大块土壤的功能,土壤破碎效果欠佳,且不能对破碎后土壤进行很好地梳理和整平,导致胡萝卜收获后,土壤表面仍是随机凹凸的块状,后期种植时需要地地表土壤单独进行梳理和整平操作,增加了耕作的劳动和资金投入。
技术实现要素:
4.本实用新型旨在克服现有技术的不足,提出了一种胡萝卜收获机,结构简单,不损坏胡萝卜肉质根的同时能够有效对较大土块进行破碎且可对地表土壤进行梳理和整平操作,便于胡萝卜的拾取和后期作物的种植。
5.为实现上述效果,本实用新型采用的技术方案为:
6.一种胡萝卜收获机,包括水平支架、固定连接于水平支架两侧底部的侧板、固定连接于水平支架的底部并位于两个侧板之间的底梁、固定连接于水平支架顶部的连接架,所述底梁上设置有多个犁铲组件,所述底梁的内部转动套接有转轴,所述转轴的两端部分别固定连接有位于侧板外侧的滚轮;
7.所述转轴的两端轴径处均固定安装有震动传动组件,所述震动传动组件的动力输出端活动连接有转动安装于两个侧板端部之间的震动分离组件;
8.所述侧板的底部分别固定设置有位于震动分离组件下方的梳理组件和位于震动分离组件外侧端下方的整平板。
9.进一步的,所述底梁的侧面设置有多个均匀分布的锁紧定位槽。
10.进一步的,所述犁铲组件包括套设于底梁外侧的定位套筒、固定连接于定位套筒外侧面上的犁铲,所述定位套筒通过锁紧螺钉紧固于底梁上。
11.进一步的,所述震动传动组件包括固定安装于转轴上的凸轮、活动连接于侧板内
壁上的顶杆,所述顶杆的端部内侧转动连接有活动嵌设与凸轮侧面内的辊筒。
12.进一步的,所述凸轮的两侧面上对称地开设有凸轮状的驱动槽,所述辊筒位于驱动槽内,辊筒的外圆面与驱动槽的槽壁滚动接触。
13.进一步的,所述顶杆的一侧固定设置有导向板,所述侧板的内壁上固定设置有导向槽,所述导向板滑动插接于导向槽内。
14.进一步的,所述震动分离组件包括转动连接于侧板内壁上的摆杆、固定于两个摆杆端部之间的摆动梁,所述摆杆远离摆动梁的一端与震动传动组件的动力输出端滑动连接,所述摆动梁的顶部固定连接有多根分离杆。
15.进一步的,所述分离杆在摆动梁上均匀切斜分布,且分离杆较高的一端靠近底梁并位于底梁的顶面下方。
16.进一步的,所述梳理组件包括固定连接于侧板底部的固定梁、多个固定设置于固定梁底部的梳理耙齿,所述梳理耙齿在固定梁的底部均匀分布且朝犁铲组件的一侧弯曲。
17.进一步的,所述梳理耙齿的最底端高于犁铲组件的最低端且低于整平板的最低端。
18.与现有技术相比较,本实用新型的有益效果如下:
19.1、本实用新型通过设置多个犁铲组件,采用从胡萝卜根部连同土壤整体采挖的方式,使胡萝卜和根部土壤一同被托起在落下,从而在避免胡萝卜肉质根与机器直接接触的情况下实现对胡萝卜根际土壤疏松,保护胡萝卜表皮不被损伤,实现最大收获商品率,所收获的胡萝卜可即时销售或入库冷藏;
20.2、本实用新型通过在犁铲组件的后方设置震动分离组件,并通过凸轮传动结构的震动传动组件实现传动并驱动震动分离组件往复摆动,可对下落在其上方的大块土壤进行主动破碎,使得土壤破碎率大幅提升;同时,在土壤破碎的过程中,也可实现胡萝卜与土壤的分离,分离后的胡萝卜可沿震动分离组件向后方滚落并散布于土壤的表面,便于胡萝卜的拾取;
21.3、本实用新型通过在震动分离组件的下方设置梳理组件,可对破碎后的土壤进行梳理,进一步疏松土壤,也可将随土散落并埋没于土壤中的胡萝卜部分地抬升,便于胡萝卜的拾取;通过设置整平板可对梳理后的土壤进行整平操作,便于后期植物的种植;
22.4、本实用新型结构简单,使用方便,可同步实现胡萝卜的收获、土壤的破碎、梳理和整平操作,极大提升了胡萝卜收获的工作效率、降低了成本投入。
附图说明
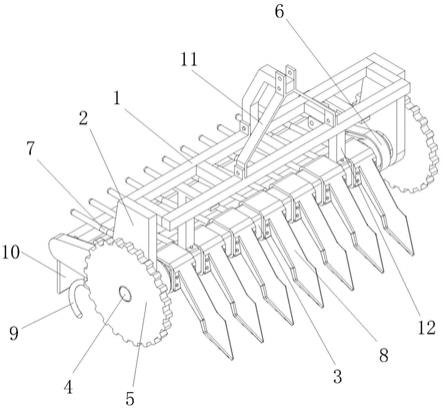
23.图1为本实用新型的立体结构示意图之一;
24.图2为本实用新型的立体结构示意图之二;
25.图3为本实用新型的主视结构示意图;
26.图4为本实用新型的俯视结构示意图;
27.图5为本实用新型的侧视结构示意图;
28.图6为所述底梁与转轴的装配结构示意图;
29.图7为所述犁铲组件的立体结构意图;
30.图8为所述震动传动组件的立体结构示意图;
31.图9为所述震动传动组件的剖视结构示意图;
32.图10为图2中a部的放大结构示意图;
33.图11为所述震动分离组件的立体结构示意图;
34.图12为所述梳理组件的立体结构示意图。
35.其中:1水平支架、2侧板、201导向槽、3底梁、301锁紧定位槽、4转轴、5滚轮、6震动传动组件、601凸轮、6011驱动槽、602顶杆、6021导向板、603辊筒、7震动分离组件、701摆杆、702摆动梁、703分离杆、8犁铲组件、801定位套筒、802犁铲、803锁紧螺钉、9梳理组件、901固定梁、902梳理耙齿、10整平板、11连接架、12吊杆。
具体实施方式
36.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
37.请参阅图1至图5,一种胡萝卜收获机,包括水平支架1、固定连接于水平支架1两侧底部的侧板2、固定连接于水平支架1的底部并位于两个侧板2之间的底梁3、固定连接于水平支架1顶部的连接架11。水平支架1为采用方形管材焊接而成的方形框架;侧板2垂直设置并通过螺栓连接固定于水平支架1的两侧端部;底梁3采用方形管材制成,其顶面两侧通过螺栓固定连接有两个吊杆12,吊杆12的顶端通过螺栓固定连接于水平支架1的底部,使底梁3平行设置于水平支架1的下方中部;连接架11有v型架板和辅助杆组成,v型架板的底部两端和辅助杆的底端分别通过销轴连接于水平支架1顶部的连接耳座上,v型架板的顶端与辅助杆的顶端通过销轴连接,从而形成三角连接架;连接架11的顶部设置有挂环,用于与拖拉机配套挂接,从而带动整个收获机工作。
38.底梁3上设置有多个犁铲组件8,本实施例中为7个。如图7所示,所述犁铲组件8包括套设于底梁3外侧的定位套筒801、固定连接于定位套筒801外侧面上的犁铲802,定位套筒801通过锁紧螺钉803紧固于底梁3上。定位套筒801方形的空心筒结构,其内部通孔截面形状与底梁3的截面形状相匹配,使得定位套筒801空套在底梁3上,并可沿底梁3的长度方向水平移动。犁铲802的形状为箭头形,前端尖头而厚度小、后端平直而厚度大,犁铲802的箭头形状可降低入土阻力,坚固耐用。犁铲802的后端通过螺栓固定在定位套筒801上,使犁铲802倾斜设置。
39.定位套筒801在与犁铲所在侧相对的侧面设置有锁紧螺钉803,底梁3靠近锁紧螺钉803的侧面上设置有多个均匀分布的锁紧定位槽301,如图6所示。锁紧螺钉803的端部可嵌入锁紧定位槽301内,旋松锁紧螺钉803后可调节定位套筒801在底梁3上的位置,从而调整相邻两个犁铲802的间距;旋紧锁紧螺母803可将调整后的定位套筒801固定于底梁3上。
40.底梁3的内部转动套接有转轴4,如图6所示。底梁3的内部同轴嵌装有套筒(图中未示出),且套筒的两端边缘与底梁3的端部焊接固定为一体。转轴4套接于套筒内,且转轴4的两端轴径分别通过轴承转动安装于两个侧板2内,使得转轴4可在侧板2内转动。转轴4的两端部分别固定连接有位于侧板2外侧的滚轮5,使得滚轮5在土壤表面滚动过程中可带动转轴4转动。优选的,滚轮5的圆周面上采用齿轮结构或轮胎结构,以增强滚轮5与土壤表面的咬合力,使得滚轮5在行进过程中保持连续地滚动。
41.转轴4的两端轴径处均固定安装有震动传动组件6。如图8和图9所示,所述震动传动组件6包括固定安装于转轴4上的凸轮601、活动连接于侧板2内壁上的顶杆602,顶杆602的端部内侧转动连接有活动嵌设与凸轮侧面内的辊筒603。两个凸轮601通过螺栓连接对称地固定设置在转轴4的两端。顶杆602的端部为y型结构并嵌套在凸轮601的边缘外部。辊筒603空套在螺栓的光杆部位,通过一个螺母实现定位,螺栓螺纹连接于顶杆602的侧壁内且端部通过防松螺母紧固连接于顶杆602的外壁上。
42.具体的,凸轮601的两侧面上对称地开设有凸轮状的驱动槽6011,辊筒603位于驱动槽6011内,辊筒603的外圆面与驱动槽6011的槽壁滚动接触,从而使凸轮601和顶杆602形成凸轮传动机构。如图10所示,顶杆602的一侧固定设置有导向板6021,侧板2的内壁上固定设置有导向槽201,导向板6021滑动插接于导向槽201内,从而使得凸轮601连续转动过程中可驱动顶杆602沿导向槽201水平地往复运动。
43.震动传动组件6的动力输出端活动连接有转动安装于两个侧板2端部之间的震动分离组件7,如图10和图11所示。震动分离组件7包括转动连接于侧板2内壁上的摆杆701、固定于两个摆杆701端部之间的摆动梁702。摆杆701的中部通过销轴安装于侧板2的内壁上,使得摆杆701可围绕该销轴自由转动。摆杆701远离摆动梁702的一端开设有腰形槽口,顶杆602的端部固定连接有销轴,销轴位于腰形槽口内,从而使摆杆701与震动传动组件6的动力输出端滑动连接,在顶杆602水平往复运动过程中,驱动摆杆701往复摆动。
44.摆动梁702的顶部固定连接有多根分离杆703,分离杆703在摆动梁702上均匀切斜分布,且分离杆703较高的一端靠近底梁3并位于底梁3的顶面下方,使得经犁铲802连续托起的胡萝卜及其根部土壤由底梁3的顶部自然落在多个分离杆703上,并在下落和撞击过程中完成土壤的破碎过程。分离杆703跟随摆动梁702上下往复摆动的过程中,可有效增强土壤的破碎效果,同时也可使胡萝卜与土壤分离并停留在分离杆703的顶部,进而沿分离杆703的顶部下面下落至收获机的后方,最后落在已经散落回地面的土壤的表面,便于胡萝卜的拾取。优选的,分离杆703的外部套设有橡胶套(图中未示出),以减弱胡萝卜掉落于分离杆703上时与分离杆703撞击造成的机械损伤。
45.侧板2的底部固定设置有位于震动分离组件7下方的梳理组件9。如图12所示,所述梳理组件9包括固定连接于侧板2底部的固定梁901、多个固定设置于固定梁901底部的梳理耙齿902。固定梁901采用方形管材制成,其两端通过螺栓连接固定于两个侧板2的底部。梳理耙齿902为采用钢筋制成的弧形杆件,在固定梁901的底部均匀分布且朝犁铲组件8的一侧弯曲。
46.经震动分离组件7破碎后的土壤随机散落在地表上,梳理耙齿902则可在前进过程中对土壤进行梳理,使土壤进一步的细化疏松;同时,由于部分胡萝卜也会跟随土壤直接掉落而被土壤完全或部分地掩埋,弯曲结构的梳理耙齿可推动突然中的胡萝卜向上滚动一端距离或露出土壤表面,进而便于胡萝卜的拾取。优选的,梳理耙齿902的外部套设有橡胶套(图中未示出),以避免梳理耙齿902对胡萝卜的表面造成机械损伤。
47.侧板2的底部还固定设置有位于震动分离组件7外侧端下方的整平板10。整平板10的顶部通过螺栓连接固定于侧板2的底部,在前进过程中,其底部对梳理耙齿902梳理过的土壤进行推碾式的整平操作,使得土壤表面平整,便于后期的植物种植。优选的,整平板10的底部设置有橡胶套(图中未示出)或整体采用柔性橡胶板,以避免其在整平过程中对散落
在土壤表面的胡萝卜造成机械损伤。
48.进一步的,梳理耙齿902的最底端高于犁铲802的最低端且低于整平板10的最低端,从而使得梳理耙齿902的梳理深度不大于犁铲802的铲土深度,避免梳理耙齿902直接作用于硬实的土壤层而造成崩齿或变形;整平板10仅对土壤表层的凸凹进行修整,无需过多对底层土壤进行整平操作,避免土壤过多地被挤压至整平板10的两侧。
49.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1