应用于立体植物农场的喷灌机器人的制作方法
1.本实用新型涉及立体植物农场技术领域,具体提供一种应用于立体植物农场的喷灌机器人。
背景技术:
2.目前,市面上存在的机器人大多应用于工业、家庭服务领域,几乎没有应用于农业领域的。农业生产中还是以人力劳作为主,劳动强度大、生产效率低、生产成本高。
3.有鉴于此,特提出本实用新型。
技术实现要素:
4.为了克服上述缺陷,本实用新型提供了一种应用于立体植物农场的喷灌机器人,其结构简单、合理,可很好的应用于立体植物农场的生产过程中,既提高了生产效率,又减轻了人员劳动强度,减少了人员配置,降低了生产成本。
5.本实用新型为了解决其技术问题所采用的技术方案是:一种应用于立体植物农场的喷灌机器人,农场地面上固定铺设有rgv轨道,该喷灌机器人包括一能够配合行走于所述rgv轨道上的rgv小车、以及均分别安装于所述rgv小车上的储液箱、水泵和喷液管路,且所述水泵的进液口与所述储液箱相连通,所述水泵的出液口与所述喷液管路相连通。
6.作为本实用新型的进一步改进,该喷灌机器人还包括一能够与农场的erp管理系统通信连接的控制器,所述控制器亦安装于所述rgv小车上,且所述控制器还能够控制所述rgv小车及所述水泵工作。
7.作为本实用新型的进一步改进,在所述rgv小车上安装有用以感测行走区域内的障碍物的防撞传感器,以及在所述储液箱中安装有用以感测液面高度的液位传感器,且所述防撞传感器和所述液位传感器均分别电连接于所述控制器。
8.作为本实用新型的进一步改进,所述水泵的进液口通过管路a与所述储液箱相连通,并在所述管路a上安装有与所述控制器电连接的电磁阀a。
9.作为本实用新型的进一步改进,所述喷液管路为至少两组,至少两组所述喷液管路均具有一竖向并定位安装于所述rgv小车上侧上的主路、以及若干个分别连通于所述主路上的支路,且每一所述主路的上端均封闭、下端均与所述水泵的出液口相连通,每一所述支路上均安装有喷头。
10.作为本实用新型的进一步改进,在所述水泵的出液口处安装有管路b,每一所述主路的下端各分别通过一电磁阀b与所述管路b相连通;且每一所述电磁阀b亦分别与所述控制器电性连接。
11.作为本实用新型的进一步改进,还在所述rgv小车上侧上定位安装有一支撑架,至少两组所述喷液管路均分别可拆卸的定位连接于所述支撑架上。
12.作为本实用新型的进一步改进,在每一所述喷液管路上还安装有分别与所述控制器电连接的压力传感器和流量传感器。
13.本实用新型的有益效果是:
①
该喷灌机器人的结构简单、合理,可很好的应用于立体植物农场的生产过程中,既提高了生产效率,又减轻了人员劳动强度,减少了人员配置,降低了生产成本。
②
该喷灌机器人通过配置防撞传感器、液位传感器、压力传感器及流量传感器等检测器件,使其具备感测周围环境、感测自身工作状况的能力,从而可实时调整工作状态、以达到生产要求,很好的提高了生产质量和效率,减少了生产浪费,降低了生产成本。
③
该喷灌机器人可与农场的erp管理系统无线通信连接,从而可很好的实现对喷灌机器人进行智能化实时监控管理。
附图说明
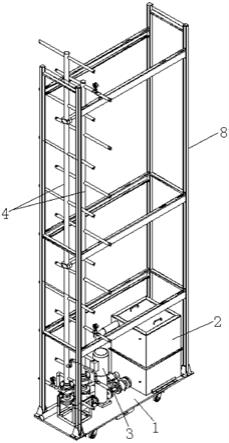
14.图1为本实用新型所述应用于立体植物农场的喷灌机器人处于第一视角下的立体结构示意图;
15.图2为图1所示喷灌机器人的局部放大结构示意图;
16.图3为本实用新型所述应用于立体植物农场的喷灌机器人处于第二视角下的立体结构示意图;
17.图4为图3所示喷灌机器人的局部放大结构示意图;
18.图5为本实用新型所述应用于立体植物农场的喷灌机器人的电控关系原理图。
19.结合附图,作以下说明:
20.1—rgv小车;10—车主体;11—滚轮;12—脚轮;13—驱动电机;2—储液箱;3—水泵;4—喷液管路;40—主路;41—支路;5—控制器;60—防撞传感器;61—液位传感器;62—压力传感器;63—流量传感器;70—电磁阀a;71—电磁阀b;8—支撑架。
具体实施方式
21.以下借由特定的具体实施例说明本实用新型的实施方式,熟悉此技艺的人士可由本说明书所揭示的内容轻易地了解本实用新型的其他优点及功效。
22.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技艺的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容所能涵盖的范围内。于本说明书中所述的“a”、“b”等仅为便于叙述明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
23.实施例1:
24.请参阅附图1至附图5所示,分别为本实用新型所述应用于立体植物农场的喷灌机器人处于两个不同视角下的立体结构示意图、两个局部结构放大示意图、以及电控关系原理图。
25.本实施例提供了一种应用于立体植物农场的喷灌机器人,农场地面上按照种植布局固定铺设有rgv轨道,该喷灌机器人包括一能够配合行走于所述rgv轨道上的rgv小车1、以及均分别安装于所述rgv小车1上侧上的储液箱2、水泵3和喷液管路4,且所述水泵3的进液口与所述储液箱2相连通,所述水泵3的出液口与所述喷液管路4相连通。
26.在本实施例中,优选的,该喷灌机器人还包括一能够与农场的erp管理系统通信连接的控制器5,所述控制器5亦安装于所述rgv小车1上,且所述控制器5还能够控制所述rgv小车1及所述水泵3工作。说明:本专利中,所述控制器采用市面上的常规控制器,其不仅涉及到软件创新;而且进一步优选的,所述控制器通过wifi无线通信方式与农场的erp管理系统相连接,通过将所述控制器与erp管理系统连接起来,可很好的实现对喷灌机器人进行智能化实时监控管理。
27.优选的,在所述rgv小车1上安装有用以感测行走区域内的障碍物的防撞传感器60(可采用激光防撞传感器),以及在所述储液箱2中安装有用以感测液面高度的液位传感器61,且所述防撞传感器60和所述液位传感器61均分别电连接于所述控制器5。即:借由所述防撞传感器可很好的避开行走区域内的障碍物,实现喷灌机器人行走自主、安全;借由所述液位传感器则可实时感测储液箱内的液面高度,这样当液面低于设定警戒位置时,所述控制器会控制喷灌机器人行走到加料工位、进行加水加肥。另外,为便于提醒人员注意,还可在所述rgv小车上安装有报警器。
28.在本实施例中,优选的,所述水泵3的进液口通过管路a与所述储液箱2相连通,并在所述管路a上安装有与所述控制器5电连接的电磁阀a70。
29.优选的,所述喷液管路4为至少两组,至少两组所述喷液管路4均具有一竖向并定位安装于所述rgv小车1上侧上的主路40、以及若干个分别连通于所述主路40上的支路41,且每一所述主路40的上端均封闭、下端均与所述水泵3的出液口相连通,每一所述支路41上均安装有喷头,所述喷头可优选采用旋转喷头,且每一所述支路上的喷头可根据需求设置为至少一个。总之,在应用时可根据植物的喷灌位置(如根部、叶面等),来选择适宜高度的喷液管路,简单、易实施。
30.进一步优选的,在所述水泵3的出液口处安装有管路b,每一所述主路40的下端各分别通过一电磁阀b71与所述管路b相连通;且每一所述电磁阀b71亦分别与所述控制器5电性连接。
31.进一步优选的,还在所述rgv小车1上侧上定位安装有一支撑架8,至少两组所述喷液管路4均分别可拆卸的定位连接于所述支撑架8上,具体的:可通过绳子/铁丝等将所述喷液管路4绑定于所述支撑架8上;也可通过卡箍/卡扣等将所述喷液管路4固定于所述支撑架8上;等等;实现易于安装固定和更换。
32.进一步优选的,在每一所述喷液管路4上还安装有分别与所述控制器5电连接的压力传感器62和流量传感器63。
33.另外,对于“所述rgv小车1配合行走于所述rgv轨道上”,这属于自动化领域中的常规技术手段,其有多种实施方式,以下仅举一例进行说明,但关于所述rgv小车的实施方式并不限于以下实施例。
34.所述rgv小车1具有一车主体10、多个分别活动安装于所述车主体10下侧上的滚轮11和定位安装于所述车主体10上的驱动电机13,其中,所述车主体10用来载物,即所述储液箱2、所述水泵3、所述喷液管路4、所述控制器5和所述支撑架8等皆分别安装于所述车主体10上侧上,多个所述滚轮11均配合安装于所述rgv轨道上,所述驱动电机13与所述控制器5电连接,且所述驱动电机13还能够驱动一所述滚轮11转动,而所述滚轮11的转动又能够使得所述滚轮11与所述rgv轨道之间产生沿前后方向的摩擦力(将所述rgv小车的行进方向定
义为前后方向),借由所述摩擦力可使得所述rgv小车1沿前后方向进行往复移动定位。
35.补充说明:
①
上述提供的是单驱动模式,但在实际应用时,可根据使用需求来选择双驱动、四驱动等其它模式,只要使所述滚轮数量与所述驱动电机数量相匹配工作即可;
②
在安装时,要调节好所述滚轮与所述rgv轨道之间的抱紧程度,以确保所述滚轮与所述rgv轨道之间产生的摩擦力大小能够带动所述喷灌机器人行走。
③
实现所述驱动电机驱动所述滚轮转动的结构有多种,如可采用:在所述驱动电机13的动力输出轴上定位套装有主动齿轮,在所述滚轮上同轴连接有一与主动齿轮啮合连接的从动齿轮;等等。
④
在所述车主体10下侧上还活动安装有多个脚轮12,便于所述rgv小车行走在未铺设有rgv轨道的地面上。
36.综上所述,本实用新型所述的喷灌机器人结构简单、合理,可很好的应用于立体植物农场的生产过程中,既提高了生产效率,又减轻了人员劳动强度,减少了人员配置,及降低了生产成本。
37.以上所述仅是本实用新型的优选实施方式,但并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1