一种爬树式振动采收机
1.本实用新型涉及振动采收领域,涉及一种爬树式振动采收机,实现以较小的激振力达到较大的采收率的目的。
背景技术:
2.我国是一个水果生产大国,每年各类水果产量都保持在一亿吨以上,林果的种植面积与日俱增。2005年全国水果栽培面积为10035.2千公顷,比2004年9768.6千公顷增加2.73%。种植结构也慢慢趋于合理,梨、苹果、柑橘三大水果的种植比重明显降低,小杂果的种植比例有了大幅度的提升。相应的,我国高大乔木类林果种植面积也有了大幅度的提升,一些高大乔木如银杏等种植面积相比往年增长了2.7%,栎树(橡树)等高大乔木在我国从南到北均有分布,尤其是在云南,种植面积更是达到了1.5亿
㎡
。同时,仍有许多果树由于整枝技术发展较差,顶端优势旺盛,生长的较为高大。
3.对于这一类高大果树,由于其生长旺盛,主干生长比较明显独立,不宜使用传统大型林业采摘机械,容易伤及树干树枝,采集率不高;而采用小型林业采收机械往往动力不足,激振力不大,不能起到很好的采摘效果,因此目前采摘这类林果往往使用人工采摘或机械辅助采摘的方式,效率低,采净率差。
4.为了达到更好的采摘效果,实现以较小的激振力达到较大的采收率的目的,充分利用树木的主干明显独立的特征,通过振动高大树木顶端实现果实采收,研究一种爬树式振动采收机改变现有的对高大乔木的采摘模式是非常有必要的。
技术实现要素:
5.本实用新型的目的是针对现有技术的不足,提供一种爬树式振动采收机。本实用新型主要是为了综合爬树式机器人和振动采收机两者的特点,公开一种全新的爬树式果树振动采收机用以解决我国林地果园的分散化种植,具有顶端优势的树木难以进行机械振摇采收等问题,实现振动能量传递最大化,以较小的激振力获得较大的采收效益,同时避免对果树造成损伤。
6.该机器小巧、灵敏,可以实现以较小的激振力达到较大的采收率的目的,充分利用树木的主干明显独立的特征,通过振动高大树木顶端实现果实采收。
7.为实现上述目的,本实用新型提供的技术方案是:
8.一种爬树式振动采收机,整机机构包括抓紧机构、行走机构、激振走机构、动力机构。
9.所述抓紧机构包括左夹持环、右夹持环和左夹持轮、右夹持轮,左夹持环和左夹持轮分别由上电动伸缩杆和下电动伸缩杆进行控制,电机驱动上电动伸缩杆进行伸缩,并使其牢牢地抓紧树木。抓紧机构的关节位置由销钉连接进行固定,减小其所受的摩擦力以保证转动不受约束。最后将左夹持环、左夹持轮销钉连接的方式进行连接并固定在上固定板和下固定板上,为了保证上固定板和下固定板能够固定夹持装置,固定板上应伸出具有一
定长度和角度的连接接口。
10.所述抓紧机构中的左夹持环和右夹持环的作用是首次抱紧和二次抱紧树干、环抱住不同直径的树木。在夹紧环外侧采取外置销设计,使电动杆可以控制左夹持环和右夹持环进行开闭。
11.所述抓紧机构为了增大左夹持环和右夹持环和树木之间的摩擦力,在左夹持环和右夹持环内侧增加了塑胶垫圈,通过塑胶垫圈增大左夹持环和右夹持环的摩擦力,可以有效防止夹紧后发生回落的现象。
12.所述抓紧机构的左夹持环和右夹持环在装配完成后其夹持半径可调,可以通过控制上电动伸缩杆的伸缩来控制夹持环的最终夹持半径,夹持树木时应能够贴合树木,从而达到抱紧和松弛的目的。
13.所述抓紧机构中的左夹持轮和右夹持轮的作用是辅助爬升,同时对树木进行辅助夹紧。夹持轮由下电动伸缩杆、固定杆、车轮组成。其中,固定杆和车轮之间通过车轴进行连接,车轴与固定杆通过螺钉进行连接,车轮与车轴通过固定销进行连接。固定杆的内部中空,留有两个销孔分别和固定板下部的固定架和电动伸缩杆以转动副进行连接。下电动伸缩杆和下固定板7上部的固定架以销钉连接,达到伸缩和固定的目的。
14.所述抓紧机构采用电动式上电动伸缩杆和下电动伸缩杆作为抓紧机构的动力来源。上电动伸缩杆和下电动伸缩杆相比液压式和气动式执行命令快,体积小,轻便灵活,便于实现夹持和松弛功能。
15.所述行走机构主要包括驱动轮、从动轮、电机、减速箱、车身。其中,电机与激振机构采用的电机为相同电机,由同一个电机为激振机构和行走机构供能。车身仅起到固定和支持各部件的作用。电机产生的转速经过减速箱内的齿轮减速之后,传递到驱动轮轴,驱动轮轴为驱动轮提供动力,带动驱动轮旋转。驱动轮旋转并在树木主干上进行攀爬从而提升高度,同时带动从动轮和左夹持轮和右夹持轮一起转动,从而达到攀爬树木的目的。
16.所述行走机构为了保证攀爬时车身整体的平衡,将驱动轮和从动轮设计为尺寸相同。在设计驱动轮和从动轮时,将驱动轮和从动轮的轮胎设计成内凹式,以便更好地贴合树木弧度。车轮胎选择橡胶材质,能在一定程度上增大车胎和树干的摩擦力,从而使爬升过程更加顺利。
17.所述激振机构是整个爬树式果树振动采收机的工作主体部分,主要由电机、减速箱、膜片式联轴器、斜齿轮、偏心块组成。电机通过膜片式联轴器和减速箱内的带轮轴相连,带轮轴通过带轮连接将电机提供的转速减速后通过膜片式联轴器传递到偏心块输入轴,并通过斜齿轮对动力的传递方向进行修改,从而使偏心块轴转动,带动两个偏心块一起转动,实现偏振。
18.所述动力机构选用了电动机作为爬树机器人的动力来源。动力机构均通过销钉固定在固定板上,采用电瓶、直流电动机作为动力来源,使用多级减速箱进行偏振机构和行走机构的转换,并且同时为两个机构提供动力。
19.所述动力机构的电机转速应能在一次减速之内完成对激振机构减速,且由于空间限制,减速比不应过大。
20.本设计结构简单,重量分配合理,操作简便,有助于采摘普通果树振摇采收机难以采收的高大乔木和林木。
21.对比于现有的技术,本实用新型的研究结论主要体现在以下几个方面:
22.(1)本技术夹紧环的设计为能够环抱住不同直径的树木。在夹紧环外侧采取外置销设计,使电动杆可以控制夹紧环进行开闭。为了增大夹紧环和树木之间的摩擦力,在夹紧环内侧增加了塑胶垫圈,通过塑胶垫圈增大夹紧环的摩擦力,可以有效防止夹紧后发生回落的现象。
23.(2)在车身上铺设了两个车轮,后轮为驱动车轮,其作用是接收电机传来的动力并将其转换为克服重力做功的机械能;前轮为无动力的从动车轮,其作用是平衡车身在攀爬时受到的力矩,使得车身在行动时不会发生倾歪或者侧翻,提高了车身运动时的稳定性。
24.(3)本技术为了保证攀爬时车身整体的平衡,将驱动轮和从动轮设计为尺寸相同。为了使车轮能更好地贴紧树干,在设计车轮时,将车轮设计为具有一定弧度。车轮胎选择橡胶材质,能在一定程度上增大车胎和树干的摩擦力,从而使爬升过程更加顺利。
25.(4)本技术选择了车身携带电瓶进行攀爬的设计,由爬树式果树振动采收机本身为电机提供能源并且采用了使用双电磁离合器分别控制偏心块和驱动轮的设计,便于启动和关停;
26.本设计平均分配了电机和电瓶的位置,将电机和电瓶分别放置于车身的两端,使得车身攀爬时具有一定的平稳度。同时,使用了两个偏心块用以完成树干的振摇工作,并且将两个偏心块在车身中间前后配置,使得车内空间紧密,车身更加平稳可靠。本次设计将激振机构放置在车身内部,这样的设计可以保证重心平稳,振摇果树时不会出现由于偏心块外置而导致的安全隐患。
附图说明
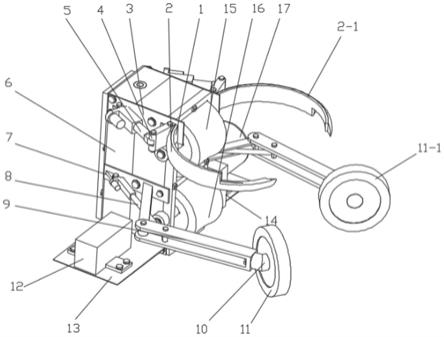
27.图1a 是本实用新型爬树式果树振动采收机张开时的示意图(主视图)。
28.图 1b是本实用新型爬树式果树振动采收机张开时的示意图(俯视图)。
29.图2a是本实用新型爬树式果树振动采收机闭合时的示意图(主视图)。
30.图 2b是本实用新型爬树式果树振动采收机闭合时的示意图(俯视图)。
31.图3a是本实用新型爬树式果树振动采收机的抓紧机构图(主视图)。
32.图3b是本实用新型爬树式果树振动采收机的抓紧机构图(俯视图)。
33.图4a是本实用新型爬树式果树振动采收机的夹持环和夹持轮的夹持范围图(主视图)。
34.图4b是本实用新型爬树式果树振动采收机的夹持环和夹持轮的夹持范围图(俯视图)。
35.图5是本实用新型爬树式果树振动采收机的行走机构中的车轮贴合图。
36.图6是本实用新型爬树式果树振动采收机的行走机构中的减速箱示意图。
37.附图说明:塑胶垫圈1、左夹持环2、右夹持环2-1、右夹持轮11-1、上固定板3、销钉4、上电动伸缩杆5、车身6、下固定板7、下电动伸缩杆8、固定杆9、夹持轮弯轴10、左夹持轮11、电瓶12、动力机构固定板13、减速箱14、从动轮15、驱动轮16、电机17、膜片式联轴器18、带轮轴19、斜齿轮20、偏心块21、树干100。
具体实施方式
38.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
39.如图所示的一种爬树式果树振动采收机,整机机构包括抓紧机构、行走机构、激振走机构、动力机构。
40.所述抓紧机构包括左夹持环2、右夹持环2-1和左夹持轮11、右夹持轮11-1,左夹持环2和左夹持轮11分别由上电动伸缩杆5和下电动伸缩杆8进行控制,电机17驱动上电动伸缩杆5进行伸缩,并使其牢牢地抓紧树木。抓紧机构的关节位置由销钉4连接进行固定,减小其所受的摩擦力以保证转动不受约束。最后将左夹持环2、左夹持轮11销钉连接的方式进行连接并固定在上固定板3和下固定板7上,为了保证上固定板3和下固定板7能够固定夹持装置,固定板上应伸出具有一定长度和角度的连接接口。
41.所述抓紧机构中的左夹持环2和右夹持环2-1的作用是首次抱紧和二次抱紧树干100、环抱住不同直径的树木。在夹紧环外侧采取外置销设计,使电动杆可以控制左夹持环2和右夹持环2-1进行开闭。
42.所述抓紧机构为了增大左夹持环2和右夹持环2-1和树木之间的摩擦力,在左夹持环2和右夹持环2-1内侧增加了塑胶垫圈1,通过塑胶垫圈1增大左夹持环2和右夹持环2-1的摩擦力,可以有效防止夹紧后发生回落的现象。
43.所述抓紧机构的左夹持环2和右夹持环2-1在装配完成后其夹持半径可调,可以通过控制上电动伸缩杆5的伸缩来控制夹持环的最终夹持半径,夹持树木时应能够贴合树木,从而达到抱紧和松弛的目的。
44.所述抓紧机构中的左夹持轮11和右夹持轮11-1的作用是辅助爬升,同时对树木进行辅助夹紧。夹持轮由下电动伸缩杆8,固定杆9,车轮11组成。夹持轮弯轴10与夹持轮11通过销钉连接进行固定。其中,固定杆9和车轮11之间通过车轴进行连接,车轴与固定杆通过螺钉进行连接,车轮与车轴通过固定销进行连接。固定杆的内部中空,留有两个销孔分别和固定板下部的固定架和电动伸缩杆以转动副进行连接。下电动伸缩杆8和下固定板7上部的固定架以销钉连接,达到伸缩和固定的目的。
45.所述抓紧机构采用电动式上电动伸缩杆5和下电动伸缩杆8作为抓紧机构的动力来源。上电动伸缩杆5和下电动伸缩杆8相比液压式和气动式执行命令快,体积小,轻便灵活,便于实现夹持和松弛功能。
46.所述行走机构主要包括驱动轮16,从动轮15,电机17,减速箱14,车身6。其中,电机17与激振机构采用的电机为相同电机,由同一个电机为激振机构和行走机构供能。车身6仅起到固定和支持各部件的作用。电机产生的转速经过减速箱14内的齿轮减速之后,传递到驱动轮轴,驱动轮轴为驱动轮16提供动力,带动驱动轮16旋转。驱动轮16旋转并在树木主干上进行攀爬从而提升高度,同时带动从动轮15和左夹持轮11和右夹持轮11-1一起转动,从而达到攀爬树木的目的。
47.所述行走机构为了保证攀爬时车身整体的平衡,将驱动轮16和从动轮15设计为尺寸相同。在设计驱动轮16和从动轮15时,将驱动轮16和从动轮15的轮胎设计成内凹式,以便
更好地贴合树木弧度。车轮胎选择橡胶材质,能在一定程度上增大车胎和树干的摩擦力,从而使爬升过程更加顺利。
48.所述激振机构是整个爬树式果树振动采收机的工作主体部分,主要由电瓶12、电机17,减速箱14,膜片式联轴器18,斜齿轮20,偏心块21组成。电机17通过膜片式联轴器18和减速箱14内的带轮轴19相连,带轮轴19通过带轮连接将电机17提供的转速减速后通过膜片式联轴器18传递到偏心块输入轴,并通过斜齿轮20对动力的传递方向进行修改,从而使偏心块轴转动,带动两个偏心块21一起转动,实现偏振。
49.所述动力机构选用了电动机17作为爬树机器人的动力来源。动力机构均通过销钉固定在固定板13上,采用电瓶12、直流电动机17作为动力来源,使用多级减速箱14进行偏振机构和行走机构的转换,并且同时为两个机构提供动力。电瓶12、电机、减速箱构成动力机构。动力机构固定板13固定动力机构。
50.所述动力机构的电机转速应能在一次减速之内完成对激振机构减速,且由于空间限制,减速比不应过大。本发明的工作过程及工作原理为:夹持环2和2-1的电动伸缩杆5初始处于收缩状态,夹持轮11和11-1的电动伸缩杆8初始处于拉伸状态。由工作人员将夹持轮11和夹紧环11-1套在树干上,启动各抓紧装置的电动伸缩杆8,夹持轮11和11-1的电动伸缩杆8将会收缩,使得夹持轮轮胎和行走机构轮胎15和16慢慢贴合树木,牢牢抱紧主干;同时,夹持环2和2-1的电动伸缩杆5将会拉伸,使得夹持环2和2-1轻轻抱紧树干。之后启动电机17,电机17产生的转速经过减速箱14内的齿轮多级减速后,离合器合并、分离,此时电机17的转速经过减速后全部传到驱动轮16,驱动轮16抱紧树干通过树干和轮胎间的摩擦力开始上升,同时带动从动轮15转动,在驱动轮16的作用下,爬树式果树振动采收机将会上升,在规定的时间内到达指定的高度。到达指定高度之前,地面上的工作人员应远程控制减速箱14内部的离合器,使离合器分离、合并,此时电机17的转速通过带轮减速和斜齿轮啮合全部传递到偏振机构的偏心块21上,车身将会凭借惯性继续上升到指定的高度。等到上升到指定高度时,工作人员远程操作夹持环2和2-1的的电动伸缩杆5,原本轻轻抱紧树干的夹持环2和2-1的将会用力夹紧树干并悬停在指定位置。此时偏振机构振摇树干顶端,使得果实获得离心力,并且振动到果实所受离心力大于果柄结合力的时候,果实脱落,落进地面的集果装置中。等到采摘工作完成之后,工作人员远程控制离合器,使离合器合并、分离,远程控制电机17反转,同时远程操作夹持环2和2-1的将会用力夹紧树干并悬停在指定位置。此时偏振机构振摇树干顶端,使得果实获的电动伸缩杆5,使电动伸缩杆5微微收缩,回到刚开始攀爬时轻轻夹紧树木的状态。此时由于电机17反转,爬树式果树振动采收机将会回落,落到开始时的高度时将会由于夹持环2和2-1的限制无法继续回落。此时工作人员应关闭电机17,操作电动伸缩杆5和8使夹紧机构松开树干,并将爬树式果树振动采收机取下,完成一次采收作业,并准备采收下一棵树木。
51.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1