一种新型自动钓鱼器的制作方法
1.本实用新型涉及渔具领域,特别是涉及一种新型自动钓鱼器。
背景技术:
2.人们在钓鱼的时候,需要事先在钓鱼点位上抛撒窝料以便吸引鱼过来,此种方式需要抛撒大量的窝料才能起到效果,浪费严重,因此,急需提出一种能够携带窝料,实现精准打窝的钓鱼器。
3.此外,本技术人于2020年11月20日提出的申请号为202022704460.6,专利名称为“一种自动钓鱼器”的实用新型专利中,记载了实现钓鱼器自动收钩的结构,该专利申请中采用的是双侧夹持控制的结构,内部结构相对复杂,而且,对于鱼钩触发驱动块采用的是抱紧固定的方式,此种方式仍存在鱼钩带动鱼钩触发驱动块脱离的风险。
技术实现要素:
4.针对上述问题,本实用新型提供了一种新型自动钓鱼器,可携带窝料,能够实现精准打窝,减少窝料浪费,而且结构简化,自动拉钩后,对鱼钩的控制更加牢固,可有效防止鱼脱钩逃跑,提高了钓鱼效率。
5.本实用新型的技术方案如下:
6.一种新型自动钓鱼器,包括梭状的中空钓鱼器本体,所述钓鱼器本体的外表面上沿其周向设有若干窝料槽,窝料槽可以沿竖向延伸,也可沿横向延伸或螺旋向延伸均可,所述钓鱼器本体的外表面上外表面上可拆卸的连接有窝料网,窝料网可选择线网,也可以采用金属线缠绕的方式来防止窝料脱落;
7.所述钓鱼器本体的内部穿设有拉线,所述拉线的两端分别设有主线连接环和子线连接环;所述钓鱼器本体的内部设有自动收钩机构,所述自动收钩机构包括与拉线连接可在钓鱼器本体内沿拉线长度方向滑动的锁定控制块、驱动锁定控制块复位拉动拉线的驱动机构和锁定锁定控制块的锁扣机构。
8.在进一步的技术方案中,所述驱动机构包括驱动杆和连接在驱动杆一端的鱼钩触发驱动块,所述驱动杆上位于钓鱼器本体的内壳体与鱼钩触发驱动块之间套设有驱动弹簧,所述驱动杆为套设在拉线上的中空结构。
9.在进一步的技术方案中,所述锁定控制块和鱼钩触发驱动块均为“凸”字形结构,所述锁定控制块的宽度大于鱼钩触发驱动块的宽度;所述锁扣机构包括铰接在钓鱼器本体内的第一定位锁扣和第二定位锁扣,所述第一定位锁扣和第二定位锁扣分别设于拉线的两侧,所述第一定位锁扣和第二定位锁扣的铰接点均靠近钓鱼器本体的小头端,所述第一定位锁紧扣朝向主线连接环的一端设有与锁定控制块的台阶面配合的凸起和与鱼钩触发驱动块的侧面凸出部配合的凹槽,所述第二定位锁紧扣朝向子线连接环的一端设有与鱼钩触发驱动块的侧面凸出部配合的凹槽;所述钓鱼器本体内还设有分别将第一定位锁扣和第二定位锁扣压向钓鱼器本体中部的第一压紧弹片和第二压紧弹片。
10.在进一步的技术方案中,所述第二定位锁紧扣朝向第一定位锁紧扣的一侧为平滑的凸面。
11.在进一步的技术方案中,所述钓鱼器本体的外表面上设有防脱槽,用于固定窝料网。
12.在进一步的技术方案中,所述拉线上靠近子线连接环处设有铅坠。
13.在进一步的技术方案中,所述鱼钩触发驱动块的平面端上设有与锁定控制块配合的定位凹槽。
14.上述技术方案的工作原理如下:
15.本实用新型在钓鱼器本体的外壳体上设置窝料槽,通过在窝料槽内填充窝料,钓鱼甩钩后,窝料槽内的窝料会被精准的投掷到钓鱼位上,在窝料槽的外侧设置窝料网,可以防止窝料过早的脱落,本实用新型采用上述结构,可携带窝料,能够实现精准打窝,减少了窝料的浪费,节约了钓鱼的成本。
16.本实用新型在钓鱼使用时,将鱼钩和子线连接在子线连接环上,挂上饵料,向外拉动驱动杆,带动鱼钩触发驱动块压缩驱动弹簧,并由第二定位锁扣将鱼钩触发驱动块固定,限制其移动(此过程,复位弹簧被压缩),此时,锁定控制块处于可自由活动的状态,在自动钓鱼器沉入水底后,自动钓鱼器大头端的铅坠将其前端翘离水底,从而使子线、鱼钩、饵料漂浮在水底,可有效诱鱼上钩,当鱼吞食饵料时,子线瞬间通过子线连接环拉动锁定控制块向前移动,将第二定位锁扣拨开,鱼钩触发驱动块失去控制,在驱动弹簧的回复力作用下,瞬间将鱼钩触发驱动块推出撞向锁定控制块,锁定控制块通过拉线带动子线连接环回拉鱼钩,当锁定控制块到达运动终点时,第一定位锁扣将锁定控制块和鱼钩触发驱动块锁定控制,进而将鱼牢牢的钩在鱼钩上,本实用新型采用上述技术方案,实现了在鱼吞食饵料时自动收钩,可有效防止鱼脱钩逃跑,解决了人们在钓鱼时,在鱼咬钩后,人需要一个反应时间去拉钩,容易发生鱼脱钩逃离的技术问题。
17.此外,相比于本技术人于2020年11月20日提出的申请号为 202022704460.6,专利名称为“一种自动钓鱼器”的实用新型专利中记载的自动收钩的结构,本实用新型采用单侧控制的结构,结构更加简化,同时,对锁定控制块(即上述专利中的鱼钩触发驱动块)采用卡、顶的方式进行锁定,锁定更加牢固,进一步的减少了鱼脱钩的风险。
18.本实用新型的有益效果是:
19.1、本实用新型不受环境地理限制,在大海、江河、水库、湖泊、鱼塘均可垂钓;
20.2、本实用新型可携带窝料,能够实现精准打窝,减少了窝料的浪费,节约了钓鱼的成本,同时,在窝料槽的外侧设置窝料网,可以防止窝料过早的脱落;
21.3、本实用新型采用单侧控制的结构,结构更加简化,同时,对锁定控制块采用卡、顶的方式进行锁定,锁定更加牢固,进一步的减少了鱼脱钩的风险;
22.4、本实用新型的结构简单、成本低廉,具有较高的经济、实用、推广价值;
23.5、本实用新型自动钓鱼器任意抛甩鱼竿时,鱼钩饵料都不会失去自动钓鱼器控制;
24.6、本实用新型的自动钓鱼器沉入水底后,铅坠将操作柄翘离水底,从而使子线、鱼钩、饵料漂浮在水底表面,可有效诱鱼上钩;
25.7、本实用新型的自动钓鱼器实现了在鱼吞食饵料时瞬间精准自动收钩,可有效防
止鱼在吞食鱼钩饵料时克服浮漂(不需要浮漂)的阻力和主线在水中漂动的阻力,当鱼吃饵料拉动子线再使在水中弯曲的主线拉动浮漂,人眼看到浮漂再提杆,提杆又要将弯曲的主线拉直再拉动子线提钓,才将鱼钓住,常规钓鱼因存在上述时间差,给鱼脱钩逃跑的机率很多,而本实用新型的自动钓鱼器,鱼咬钩后一拉子线,会在允许长度内瞬间触发驱动,大大提高了钓鱼效率。
附图说明
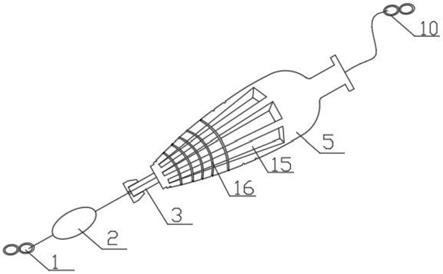
26.图1是本实用新型实施例所述新型自动钓鱼器的外部结构示意图;
27.图2是本实用新型实施例所述新型自动钓鱼器准备状态时的内部结构示意图;
28.图3是本实用新型实施例所述新型自动钓鱼器鱼咬钩时的内部结构示意图;
29.图4是本实用新型实施例所述新型自动钓鱼器自动拉钩完成时的内部结构示意图。
30.附图标记说明:
31.1、子线连接环;2、铅坠;3、驱动杆;4、驱动弹簧;5、钓鱼器本体;6、第一压紧弹片;7、第一定位锁扣;8、锁定控制块;9、拉线;10、主线连接环; 11、第二压紧弹片;12、第二定位锁扣;13、防脱槽;14、鱼钩触发驱动块; 15、窝料槽;16、窝料网。
具体实施方式
32.下面结合附图对本实用新型的实施例作进一步说明。
33.实施例:
34.如图1所示,一种新型自动钓鱼器,包括梭状的中空钓鱼器本体5,钓鱼器本体5的外表面上沿其周向设有若干窝料槽15,窝料槽15可以沿竖向延伸,也可沿横向延伸或螺旋向延伸均可,钓鱼器本体5的外表面上外表面上可拆卸的连接有窝料网16,窝料网16可选择线网,也可以采用金属线缠绕的方式来防止窝料脱落;
35.钓鱼器本体5的内部穿设有拉线9,拉线9的两端分别设有主线连接环10 和子线连接环1;钓鱼器本体5的内部设有自动收钩机构,自动收钩机构包括与拉线9连接可在钓鱼器本体5内沿拉线9长度方向滑动的锁定控制块8、驱动锁定控制块8复位拉动拉线9的驱动机构和锁定锁定控制块8的锁扣机构。
36.在本实施例中,如图2
‑
图4所示,驱动机构包括驱动杆3和连接在驱动杆 3一端的鱼钩触发驱动块14,驱动杆3上位于钓鱼器本体5的内壳体与鱼钩触发驱动块14之间套设有驱动弹簧4,驱动杆3为套设在拉线9上的中空结构。
37.在本实施例中,如图2
‑
图4所示,锁定控制块8和鱼钩触发驱动块14均为“凸”字形结构,锁定控制块8的宽度大于鱼钩触发驱动块14的宽度;锁扣机构包括铰接在钓鱼器本体5内的第一定位锁扣7和第二定位锁扣12,第一定位锁扣7和第二定位锁扣12分别设于拉线9的两侧,第一定位锁扣7和第二定位锁扣12的铰接点均靠近钓鱼器本体5的小头端,第一定位锁紧扣朝向主线连接环10的一端设有与锁定控制块8的台阶面配合的凸起和与鱼钩触发驱动块14 的侧面凸出部配合的凹槽,第二定位锁紧扣朝向子线连接环1的一端设有与鱼钩触发驱动块14的侧面凸出部配合的凹槽;钓鱼器本体5内还设有分别将第一定位锁扣7和第二定位锁扣12压向钓鱼器本体5中部的第一压紧弹片6和第二压紧弹片11。
38.上述技术方案的工作原理如下:
39.本实用新型在钓鱼器本体5的外壳体上设置窝料槽15,通过在窝料槽15内填充窝料,钓鱼甩钩后,窝料槽15内的窝料会被精准的投掷到钓鱼位上,在窝料槽15的外侧设置窝料网16,可以防止窝料过早的脱落,本实用新型采用上述结构,可携带窝料,能够实现精准打窝,减少了窝料的浪费,节约了钓鱼的成本。
40.本实用新型在钓鱼使用时,将鱼钩和子线连接在子线连接环1上,挂上饵料,向外拉动驱动杆3,带动鱼钩触发驱动块14压缩驱动弹簧4,并由第二定位锁扣12将鱼钩触发驱动块14固定,限制其移动(此过程,复位弹簧被压缩),此时,锁定控制块8处于可自由活动的状态,在自动钓鱼器沉入水底后,自动钓鱼器大头端的铅坠将其前端翘离水底,从而使子线、鱼钩、饵料漂浮在水底,可有效诱鱼上钩,当鱼吞食饵料时,子线瞬间通过子线连接环1拉动锁定控制块8向前移动,将第二定位锁扣12拨开,鱼钩触发驱动块14失去控制,在驱动弹簧4的回复力作用下,瞬间将鱼钩触发驱动块14推出撞向锁定控制块8,锁定控制块8通过拉线9带动子线连接环1回拉鱼钩,当锁定控制块8到达运动终点时,第一定位锁扣7将锁定控制块8和鱼钩触发驱动块14锁定控制,进而将鱼牢牢的钩在鱼钩上,本实用新型采用上述技术方案,实现了在鱼吞食饵料时自动收钩,可有效防止鱼脱钩逃跑,解决了人们在钓鱼时,在鱼咬钩后,人需要一个反应时间去拉钩,容易发生鱼脱钩逃离的技术问题。
41.此外,相比于本技术人于2020年11月20日提出的申请号为 202022704460.6,专利名称为“一种自动钓鱼器”的实用新型专利中记载的自动收钩的结构,本实用新型采用单侧控制的结构,结构更加简化,同时,对锁定控制块8(即上述专利中的鱼钩触发驱动块)采用卡、顶的方式进行锁定,锁定更加牢固,进一步的减少了鱼脱钩的风险。
42.在另外一个实施例中,如图2
‑
图4所示,第二定位锁紧扣朝向第一定位锁紧扣的一侧为平滑的凸面。
43.在另外一个实施例中,如图1
‑
图4所示,钓鱼器本体5的外表面上设有防脱槽13,用于固定窝料网16。
44.在另外一个实施例中,如图1
‑
图4所示,拉线9上靠近子线连接环1处设有铅坠2。
45.在另外一个实施例中,鱼钩触发驱动块14的平面端上设有与锁定控制块8 配合的定位凹槽。
46.以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1