一种园林绿化清理自动避障装置的制作方法
1.本实用新型涉及园林绿化技术领域,具体为一种园林绿化清理自动避障装置。
背景技术:
2.园林绿化是在一定的地域运用工程技术和艺术手段,通过改造地形(或进一步筑山、叠石、理水)种植树木花草、营造建筑和布置园路等途径创作而成的美的自然环境和游憩境域,园林深受广大群众的喜爱,为了使园林长期保持美观状态,需要定期对园林进行除草处理,使其抑制小草的生长。
3.但是目前在对园林进行除草时,若前方出现障碍物时,有时工作人员不能够及时的发现,从而使除草设备碰上了障碍物,造成了除草设备的损坏,没有对此缺陷进行相应的改进。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种园林绿化清理自动避障装置,解决了目前在对园林进行除草时,若前方出现障碍物时,有时工作人员不能够及时的发现,从而使除草设备碰上了障碍物,造成了除草设备损坏的问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:一种园林绿化清理自动避障装置,包括壳体和圆形罩,所述壳体的一侧上表面嵌入安装有伺服电机,所述伺服电机的输出轴与圆形罩的后表面之间通过驱动组件连接,所述圆形罩的前表面设置有缓冲件,且圆形罩的前侧上表面垂直连接有凸板,所述凸板的上端前表面固定连接有红外测距仪,所述壳体的一侧固定安装有plc控制器。
6.所述驱动组件包括有驱动杆,所述驱动杆的一端侧面贯穿滑动安装有弧形杆,且驱动杆的另一端与圆形罩的后表面固定连接,所述弧形杆的两端分别与壳体的内部两侧面固定连接,所述驱动杆的另一端上下表面均固定连接有凸轴,且驱动杆是嵌入转动安装于壳体的前表面中间位置处,且驱动杆的上表面位于弧形杆和凸轴之间位置处开设有滑槽,所述滑槽的内部嵌入滑动安装有滑轴,所述滑轴的上端转动连接有调节杆,所述伺服电机的输出轴固定连接有转盘,所述转盘的另一侧转动连接于转盘的一侧下表面。
7.优选的,所述壳体的前表面开设有与驱动杆相匹配的活动槽,两个所述凸轴相背的一端分别与活动槽的内部上下表面转动连接,所述弧形杆的圆心与凸轴的圆心位于同一轴线上,所述驱动组件整体处于水平状态。
8.优选的,所述红外测距仪的输出端通过导线与plc控制器的输入端电性连接,所述plc控制器的输出端通过导线与伺服电机的输入端电性连接。
9.优选的,所述缓冲件包括有与圆形罩相适配的弧形板,所述弧形板与圆形罩的前表面之间通过若干个弹簧固定连接。
10.优选的,所述缓冲件的前表面等距开设有若干个凹槽,所述凹槽的内部转动安装有转辊,所述转辊是延伸出凹槽的内部并形成凸起。
11.优选的,所述圆形罩的上表面中间位置处嵌入安装有切割电机,所述切割电机的输出轴固定连接有切割刀。
12.有益效果
13.本实用新型提供了一种园林绿化清理自动避障装置。与现有技术相比具备以下有益效果:
14.1、该园林绿化清理自动避障装置,通过驱动杆的另一端上下表面均固定连接有凸轴,且驱动杆是嵌入转动安装于壳体的前表面中间位置处,且驱动杆的上表面位于弧形杆和凸轴之间位置处开设有滑槽,滑槽的内部嵌入滑动安装有滑轴,滑轴的上端转动连接有调节杆,伺服电机的输出轴固定连接有转盘,转盘的另一侧转动连接于转盘的一侧下表面,当该装置在对园林进行除草的过程中,若前方遇到障碍物时,在红外测距仪的检测下,能够及时发现障碍物,并且在伺服电机的工作下,能够自动调整圆形罩的方向,这样避免了向障碍物的方向进行除草工作,进而对该除草装置起到了保护作用。
15.2、该园林绿化清理自动避障装置,通过设置缓冲件,当在除草的过程中,避障出现失误而撞上障碍物时,在弹簧的弹性下,能够起到缓冲的作用,同时在转辊的转动下,能够以滑动摩擦变为滚动摩擦,减小摩擦力,防止除草设备被撞坏。
附图说明
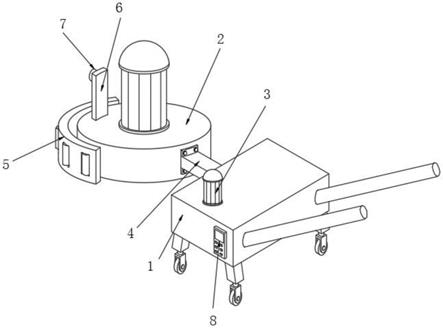
16.图1为本实用新型结构的示意图;
17.图2为本实用新型驱动组件结构的示意图;
18.图3为本实用新型圆形罩结构的示意图;
19.图4为本实用新型缓冲件结构的示意图。
20.图中:1、壳体;2、圆形罩;21、切割电机;22、切割刀;3、伺服电机;4、驱动组件;41、驱动杆;42、弧形杆;43、凸轴;44、滑槽;45、滑轴;46、调节杆;47、转盘;5、缓冲件;51、弧形板;52、弹簧;53、凹槽;54、转辊;6、凸板;7、红外测距仪;8、plc控制器。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1,本实用新型提供一种技术方案:一种园林绿化清理自动避障装置,包括壳体1和圆形罩2,壳体1的一侧上表面嵌入安装有伺服电机3,伺服电机3的输出轴与圆形罩2的后表面之间通过驱动组件4连接,圆形罩2的前表面设置有缓冲件5,且圆形罩2的前侧上表面垂直连接有凸板6,凸板6的上端前表面固定连接有红外测距仪7,壳体1的一侧固定安装有plc控制器8,圆形罩2的上表面中间位置处嵌入安装有切割电机21,切割电机21的输出轴固定连接有切割刀22,切割电机21带动切割刀22转动,能够完成除草工作。
23.请参阅图2,本实用新型实施例中,驱动组件4包括有驱动杆41,驱动杆41的一端侧面贯穿滑动安装有弧形杆42,且驱动杆41的另一端与圆形罩2的后表面固定连接,弧形杆42的两端分别与壳体1的内部两侧面固定连接,驱动杆41的另一端上下表面均固定连接有凸
轴43,且驱动杆41是嵌入转动安装于壳体1的前表面中间位置处,且驱动杆41的上表面位于弧形杆42和凸轴43之间位置处开设有滑槽44,滑槽44的内部嵌入滑动安装有滑轴45,滑轴45的上端转动连接有调节杆46,伺服电机3的输出轴固定连接有转盘47,转盘47的另一侧转动连接于转盘47的一侧下表面,壳体1的前表面开设有与驱动杆41相匹配的活动槽,两个凸轴43相背的一端分别与活动槽的内部上下表面转动连接,弧形杆42的圆心与凸轴43的圆心位于同一轴线上,驱动组件4整体处于水平状态,红外测距仪7的输出端通过导线与plc控制器8的输入端电性连接,plc控制器8的输出端通过导线与伺服电机3的输入端电性连接,红外测距仪7的型号为hkl
‑
87,plc控制器8的型号为jlo
‑
25,伺服电机3的型号为ch/v。
24.请参阅图3
‑
4,本实用新型实施例中,缓冲件5包括有与圆形罩2相适配的弧形板51,弧形板51与圆形罩2的前表面之间通过若干个弹簧52固定连接,缓冲件5的前表面等距开设有若干个凹槽53,凹槽53的内部转动安装有转辊54,转辊54是延伸出凹槽53的内部并形成凸起。
25.使用时,在plc控制器8上设置好红外测距仪7所检测到障碍物的距离,当红外测距仪7检测到障碍物距离达到预先的数值时,红外测距仪7将信号传达给plc控制器8,plc控制器8使伺服电机3工作,伺服电机3带动转盘47转动,在调节杆46的活动连接下,转盘47会带动调节杆46做偏心运动,调节杆46就会带动滑轴45移动,由于弧形杆42的圆心与凸轴43的圆心位于同一轴线上,驱动组件4整体处于水平状态,因此滑轴45在驱动杆41上的滑槽44滑动时,驱动杆41会以凸轴43为轴心进行转动,而驱动杆41的一端会在弧形杆42上滑动,驱动杆41转动时会带动圆形罩2进行摆动,使圆形罩2转动到另外一个角度,这样圆形罩2就会避开了障碍物,防止撞上了障碍物,若避障功能出现失误时,使圆形罩2撞上障碍物,在弹簧52的弹性下,弹簧52起到缓冲作用,减少冲击力,同时在转辊54的转动下,能够将滑动摩擦变成滚动摩擦,减小摩擦力,进而对圆形罩2起到了保护作用,将圆形罩2的损失给降到最低。
26.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1