一种割草机器人的制作方法
1.本实用新型属于割草机技术领域,尤其涉及一种割草机器人。
背景技术:
2.割草机器人作为用于修剪草坪、植被等植物的机械工具,有效节省了除草工人的作业时间,减少了大量的人力资源,因此被广泛应用于除草技术领域中。
3.割草机器人在工作过程中,经常会遇到障碍物如石块、树木等,此时会使割草机器人发生碰撞而影响其正常工作;同时,小型的割草机有时还会因需要更换作业场地,被以直接提起(即提升)的方式来进行作业场地的更换,此时就会出现安全隐患,割草机器人可能会对移动人员造成伤害。出于上述两种情况考虑,现有技术中的割草机器人就需要在工作过程中及时判断出割草机器人是否有发生碰撞或提升。现有技术中一般采用霍尔感应的方式检测割草机器人是否在工作中发生碰撞或提升。但此种检测方法需要在割草机器人外壳上设置孔槽,对应位置的外壳内部需要设置弹性揉杆,两者需要严格匹配(即对割草机器人的机身设计要求严格),否则容易因误碰而导致误报的发生,影响割草机器人的正常工作。
技术实现要素:
4.本实用新型实施例提供一种割草机器人,旨在解决现有的检测割草机器人碰撞或提升的方法存在对割草机器人的机身设计要求严格,否则容易因误碰而导致误报的发生,影响割草机器人的正常工作的问题。
5.本实用新型实施例是这样实现的,提供一种割草机器人,该包括:
6.底座;
7.设置在所述底座上的内壳;
8.设置在所述内壳外部,且可与所述内壳相对运动的外壳;
9.相对设置在同一直线上的光感应接收器和光感应发射器,所述光感应接收器和所述光感应发射器其中一个设置在所述外壳内侧,另一个设置在所述内壳。
10.更进一步地,所述割草机器人还包括:
11.将所述光感应接收器安装在所述外壳内侧的接收器灯座;
12.将所述光感应发射器安装在所述内壳的发射器灯座。
13.更进一步地,所述接收器灯座可拆卸的安装在所述外壳内侧,所述发射器灯座可拆卸的安装在所述内壳。
14.更进一步地,所述外壳内侧设置有第一槽位,所述接收器灯座嵌于所述第一槽位内;所述内壳设置有第二槽位,所述发射器灯座嵌于所述第二槽位内。
15.更进一步地,所述第一槽位与所述第二槽位呈上下设置,且位于同一垂直线上。
16.更进一步地,所述接收器灯座与所述外壳通过第一螺丝连接;所述发射器灯座与所述内壳通过第二螺丝连接。
17.更进一步地,设置在所述内壳与所述外壳之间的缓冲件。
18.更进一步地,所述缓冲件为软胶或弹簧。
19.更进一步地,所述光感应发射器与所述光感应接收器的直线距离范围为2-10cm。
20.更进一步地,所述光感应发射器为红外感应发射器;所述光感应接收器红外感应接收器。
21.本实用新型实施例提供的割草机器人,包括底座;设置在底座上的内壳;设置在内壳外部,且可与内壳相对运动的外壳;相对设置在同一直线上的光感应接收器和光感应发射器,光感应接收器和光感应发射器其中一个设置在外壳内侧,另一个设置在内壳。本实用新型实施例提供的割草机器人,通过光感应接收器和光感应发射器可以精准的检测出割草机器人是否发生提升或碰撞,有效保证了割草机器人使用过程中的安全情况;同时,与现有技术的霍尔感应方式相比,降低了机身设计要求,不会发生误报情况,用户体验更佳。
附图说明
22.图1是本实用新型实施例提供的一种割草机器人的结构示意图;
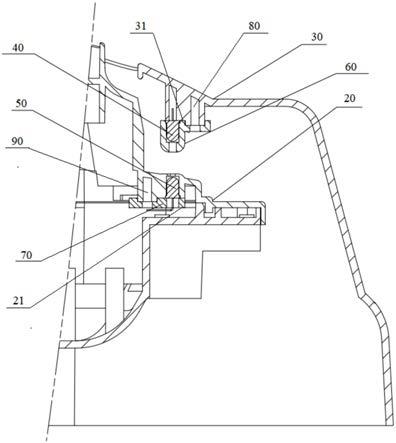
23.图2是本实用新型实施例提供的一种割草机器人的侧视图的剖面结构示意图。
24.附图标号说明:
25.10、底座;20、内壳;30、外壳;40、光感应接收器;50、光感应发射器;60、接收器灯座;70、发射器灯座;31、第一槽位;21、第二槽位;80、第一螺丝;90、第二螺丝。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.本实用新型实施例提供的割草机器人,包括底座10;设置在底座10上的内壳20;设置在内壳20外部,且可与内壳20相对运动的外壳30;相对设置在同一直线上的光感应接收器40和光感应发射器50,光感应接收器40和光感应发射器50其中一个设置在外壳30内侧,另一个设置在内壳20。本实用新型实施例提供的割草机器人,通过光感应接收器40和光感应发射器50可以精准的检测出割草机器人是否发生提升或碰撞,有效保证了割草机器人使用过程中的安全情况;同时,与现有技术的霍尔感应方式相比,降低了机身设计要求,不会发生误报情况,用户体验更佳。
28.实施例一
29.同时参见图1和图2,本实施例提供一种割草机器人,该割草机器人包括:
30.底座10;设置在底座10上的内壳20;设置在内壳20外部,且可与内壳20相对运动的外壳30;相对设置在同一直线上的光感应接收器40和光感应发射器50,光感应接收器40和光感应发射器50,其中一个设置在外壳30内侧,另一个设置在内壳20。
31.在本实用新型实施例中,光感应接收器40和光感应发射器50其中一个可以设置在内壳20的内侧,也可以设置在内壳20的外侧,具体不做限定。通过设置在内壳20内侧,可以使光感应接收器40或光感应发射器50更加稳固;而通过在内壳20外侧,可以使光感应接收器40或光感应发射器50的安装更加方便。
32.在本实用新型的实施例中,光感应发射器50与光感应接收器40的直线距离范围为
2-10cm,在此距离范围内,不但可以有效保证光信号的接收,且在割草机器人发生碰撞时预留有存够空间,防止光感应发射器50与光感应接收器40因互相碰撞而损坏。
33.在本实用新型的一个实施例中,光感应发射器50包括红外感应发射器、激光感应发射器;光感应接收器40包括红外感应接收器、激光感应接收器;优选的,光感应发射器50为红外感应发射器;光感应接收器40包括红外感应接收器,选用红外感应发射器与红外感应接收器在保证检测精准度的同时,可以节约割草机器人整体的成本。
34.在本实用新型的实施例中,可以设置两套光感应接收器40和光感应发射器50,一套光感应接收器40和光感应发射器50用于检测割草机器人发生碰撞的情况,一套光感应接收器40和光感应发射器50用于割草机器人发生提升的情况,通过设置两套光感应接收器40和光感应发射器50分别用于检测割草机器人是否碰撞或提升,检测效率更高,割草机器人可以实现碰撞与提升的同步检测。
35.实施例二
36.在实施例一的基础上,上述割草机器人还包括:
37.将光感应接收器40安装在外壳30内侧的接收器灯座60;将光感应发射器50安装在内壳20的发射器灯座70。通过设置接收器灯座60和发射器灯座70可以起到便于光感应接收器40和光感应发射器50安装的同时,还可以有效保护光感应接收器40和光感应发射器50,防止因割草机器人发生碰撞时,损坏到光感应接收器40和光感应发射器50。
38.在本实用新型的一个优选实施例中,接收器灯座60可拆卸的安装在外壳30内侧,发射器灯座70可拆卸的安装在内壳20内侧或外侧。
39.在本实用新型实施例中,可拆卸的安装方式包括但不限于卡扣、螺杆和螺母等方式,具体不做限定。通过设置可拆卸的灯座安装方式,便于对灯座的安装及更换。
40.实施例三
41.基于上述实施例二的基础上,外壳30内侧设置有第一槽位31,接收器灯座60嵌于第一槽位31内;内壳20设置有第二槽位21,发射器灯座70嵌于第二槽位21内。
42.在本实用新型实施例中,通过设置第一槽位31和第二槽位21可以便于接收器灯座60和发射器灯座70的定位安装,使灯座更加稳固,进而起到有效防护光感应接收器40和光感应发射器50的作用。
43.作为本实用新型的一个优选实施例,第一槽位31与第二槽位21呈上下设置,且位于同一垂直线上。
44.在本实用新型的其他实施例中,第一槽位31与第二槽位21还可以呈左右设置,且位于同一水平线上等,只要保证第一槽位31与第二槽位21在一条直线上呈相对设置即可。可以理解,优先的方式为使第一槽位31与第二槽位21呈上下设置,且位于同一垂直线上,便于割草机器人在前方发生碰撞或上方发生提升的时候,有效检测到碰撞或提升的发生;而当割草机器人正常工作时,此种设置方式可以有效保证割草机器人的光感应接收器40精准接收到光感应发射器50发送的光信号。
45.实施例四
46.在本实用新型的一个优选实施例中,接收器灯座60与外壳30通过第一螺丝80连接;发射器灯座70与内壳20通过第二螺丝90连接。
47.在本实用新型实施例中,通过设置第一螺丝80、第二螺丝90可以使接收器灯座60
与外壳30、发射器灯座70与内壳20的固定,防止碰撞或提升发生时因灯座的不稳固而导致光感应接收器40或光感应发射器50的损坏。
48.实施例五
49.在上述实施例一的基础上,该割草机器人还包括:
50.设置在内壳20与外壳30之间的缓冲件(未标注)。
51.可选的,缓冲件为软胶或弹簧等,具体根据用户需求进行选择。
52.在本实用新型实施例中,通过在内壳20与外壳30之间设置如软胶或弹簧等缓冲件,可以当割草机器人发生碰撞时,防止内壳20或外壳30的损坏,进而减低割草机器人损害的风险。
53.割草机器人检测碰撞或提升发生的工作原理:为了提高检测的效率,以割草机人上安装有两套光感应接收器40和光感应发射器50为例进行说明,相应的接收器灯座60、接收器灯座70、第一槽位31、第二槽位21、第一螺丝80、第二螺丝90均配置为两套,光感应器为红外光感应器为例。在割草机器人正常工作时,割草机器人内壳20上的红外光感应发射器50发射红外信号给红外感应接收器40,工作原理可以解释为:正常情况下,红外光感接收应器(即光感应接收器40与红外光感应发射器(即光感应发射器50)处于同一直线相对位置,红外光感应接收器可以持续接收到红外光感应接发射器发射的红外信号,如果发生碰撞或提升,外壳与内壳错位,红外光感应接收器与红外光感应发射器不在直线的相对位置,红外光感应接收器就无法接收到红外光感应发射器发射的红外信号,此时就可以判定为割草机发生了碰撞或提升。优选的,判定的标准可以设定一个预设的时间t1,当无法接收红外信号的时间t2大于t1时,就判定为碰撞或提升,以过滤各种短时间的震动和碰撞造成的误判。可以理解,通过两套光感应接收器40和光感应发射器50,可以将一套设置为碰撞检测,一套设置为提升检测,当有一套装置检测到t2大于t1时,即可以确定割草机器人发生碰撞或提升。
54.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1