一种无人驱鸟车系统的制作方法
1.本实用新型属于无人驾驶技术领域,涉及一种无人驱鸟车系统。
背景技术:
2.鸟类是飞机起降时的一个重要的安全威胁,目前在各大机场均设置有各种驱鸟用设备,而其中一种就是驱鸟车。
3.传统的驱鸟车均采用在普通车辆上加入驱鸟器等设备的方式,需要人工开车。
4.随着无人驾驶技术的发展,出现了比较成熟的agv小车,可以实现精确定位,精确导航,节省了人工资源。
5.然而agv小车采用电池组供电,存在着电池组的供电问题,传统的agv小车不能直接对电池组中的单个电池进行检测,当单个电池出现问题时,无法确定故障电池。
技术实现要素:
6.本实用新型的目的是提供一种无人驱鸟车系统,解决了通过agv小车进行无人驱鸟、对agv小车的电池组进行逐个检测的技术问题。
7.为实现上述目的,本实用新型采用如下技术方案:
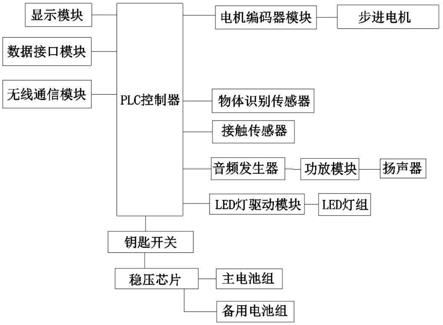
8.一种无人驱鸟车系统,包括agv驱动单元、声光驱鸟单元和供电单元,agv驱动单元包括plc控制器、显示模块、数据接口模块、无线通信模块、电机编码器模块、步进电机、旋转编码模块、物体识别传感器和接触传感器,显示模块、数据接口模块、无线通信模块、电机编码器模块、物体识别传感器和接触传感器均与plc控制器连接;
9.电机编码器模块与步进电机连接,步进电机与旋转编码模块连接,旋转编码模块与plc控制器连接;
10.声光驱鸟单元包括音频发生器、功放模块、扬声器、led灯驱动模块和led灯组,plc控制器与音频发生器连接,音频发生器与功放模块连接,功放模块与扬声器连接;
11.led驱动模块与plc控制器连接,led灯组与led驱动模块连接;
12.供电单元包括稳压芯片、主电池组、备用电池组和钥匙开关,主电池组和备用电池组均与稳压芯片连接,稳压芯片与钥匙开关连接,稳压芯片为agv驱动单元和声光驱鸟单元供电;
13.主电池组包括锂电池组和用于检测电池电量的电池检测电路。
14.优选的,所述音频发生器为da模块,通过pwm信号发出音频信号,所述da模块的型号为ad5320。
15.优选的,所述功放模块的型号为lm386,所述led灯驱动模块为tlc5947rhbr型led灯驱动器及其外围电路。
16.优选的,所述显示模块为触摸屏,所述数据接口模块为max485及其外围电路,所述无线通信模块为usr-g780 v2型4g dtu,所述plc控制器的型号为siemens s7-221,所述步进电机的型号为57hsz1.2n,所述电机编码器的型号为hbs57,所述物体识别传感器为摄像
头,所述接触传感器为接触开关。
17.优选的,所述电池检测电路包括自锁式继电器km1、电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8、可控硅q1、可控硅q2、可控硅q3、继电器j1、继电器j2、继电器j3和继电器j4,所述锂电池组包括锂电池b1、锂电池b2、锂电池b3和锂电池b4,锂电池b1的正极通过继电器的常闭端连接自锁式继电器km1,并通过自锁式继电器km1输出锂电池组电压,锂电池组电压为agv驱动单元和声光驱鸟单元供电,继电器j1的常开端通过串联连接的电阻r1和电阻r5连接地线;
18.锂电池b2的正极通过继电器j2的常闭端连接锂电池b1的负极,继电器j2的常开端通过串联连接的电阻r2和电阻r6连接地线;
19.锂电池b3的正极通过继电器j3的常闭端连接锂电池b2的负极,继电器j3的常开端通过串联连接的电阻r3和电阻r7连接地线;
20.锂电池b4的正极通过继电器j4的常闭端连接锂电池b3的负极,继电器j3的常开端通过串联连接的电阻r4和电阻r8连接地线;
21.锂电池b1的负极、锂电池b2的负极和锂电池b3的负极分别通过可控硅q1、可控硅q2和可控硅q3连接地线,可控硅q1的控制极、可控硅q2的控制极和可控硅q3的控制极均连接所述plc控制器的一个io口;
22.锂电池b4的负极连接地线;
23.继电器j1、继电器j2、继电器j3和继电器j4的线圈均与可控硅q1的控制极连接;
24.所述自锁式继电器km1连接钥匙开关。
25.优选的,所述备用电池组包括一个锂电池组b5和一个自锁式继电器km2,自锁式继电器km2的自锁控制端连接钥匙开关,锂电池组b5通过自锁式继电器km2输出备用电源,备用电源连接所述稳压芯片。
26.优选的,所述稳压芯片的型号为lm7805和12v dc-dc模块。
27.本实用新型所述的一种无人驱鸟车系统,解决了通过agv小车进行无人驱鸟、对agv小车的电池组进行逐个检测的技术问题,本实用新型可以通过da芯片发出pwm信号,从而模拟各种频率的声音,制造用于驱赶鸟类的噪声,驱鸟效果好,本实用新型通过agv小车实现自动驾驶,实现了无人驱鸟,极大的减小了人工工作,本实用新型可以对agv小车的供电电池组进行逐一检测,可以在线快速定位故障电池,确保agv小车的供电维护。
附图说明
28.图1为本实用新型的系统架构图;
29.图2为本实用新型的供电单元的电路原理图。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.如图1-图2所示的一种无人驱鸟车系统,包括agv驱动单元、声光驱鸟单元和供电
单元,agv驱动单元包括plc控制器、显示模块、数据接口模块、无线通信模块、电机编码器模块、步进电机、旋转编码模块、物体识别传感器和接触传感器,显示模块、数据接口模块、无线通信模块、电机编码器模块、物体识别传感器和接触传感器均与plc控制器连接;
32.在本实施例中,用户可以通过无线通信模块向plc控制器发送导航信息,从而控制agv小车的运行轨迹。
33.接触传感器为近距离物体传感器,用来识别是否撞到障碍物。
34.钥匙开关用来开启或关闭agv小车的供电。
35.电机编码器模块与步进电机连接,步进电机与旋转编码模块连接,旋转编码模块与plc控制器连接;
36.声光驱鸟单元包括音频发生器、功放模块、扬声器、led灯驱动模块和led灯组,plc控制器与音频发生器连接,音频发生器与功放模块连接,功放模块与扬声器连接;
37.led驱动模块与plc控制器连接,led灯组与led驱动模块连接;
38.供电单元包括稳压芯片、主电池组、备用电池组和钥匙开关,主电池组和备用电池组均与稳压芯片连接,稳压芯片与钥匙开关连接,稳压芯片为agv驱动单元和声光驱鸟单元供电;
39.本实施例中,plc控制器通过可控制da模块来模拟各种声音,da模块发出的pwm信号经过功放模块放大后,可以很好的发出驱鸟噪声。本实用新型还设有led灯组,可以发出用于驱鸟的光。
40.主电池组包括锂电池组和用于检测电池电量的电池检测电路。
41.优选的,所述音频发生器为da模块,通过pwm信号发出音频信号,所述da模块的型号为ad5320。
42.优选的,所述功放模块的型号为lm386,所述led灯驱动模块为tlc5947rhbr型led灯驱动器及其外围电路。
43.优选的,所述显示模块为触摸屏,所述数据接口模块为max485及其外围电路,所述无线通信模块为usr-g780 v2型4g dtu,所述plc控制器的型号为siemens s7-221,所述步进电机的型号为57hsz1.2n,所述电机编码器的型号为hbs57,所述物体识别传感器为摄像头,所述接触传感器为接触开关。
44.优选的,所述电池检测电路包括自锁式继电器km1、电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、电阻r8、可控硅q1、可控硅q2、可控硅q3、继电器j1、继电器j2、继电器j3和继电器j4,所述锂电池组包括锂电池b1、锂电池b2、锂电池b3和锂电池b4,锂电池b1的正极通过继电器的常闭端连接自锁式继电器km1,并通过自锁式继电器km1输出锂电池组电压,锂电池组电压为agv驱动单元和声光驱鸟单元供电,继电器j1的常开端通过串联连接的电阻r1和电阻r5连接地线;
45.锂电池b2的正极通过继电器j2的常闭端连接锂电池b1的负极,继电器j2的常开端通过串联连接的电阻r2和电阻r6连接地线;
46.锂电池b3的正极通过继电器j3的常闭端连接锂电池b2的负极,继电器j3的常开端通过串联连接的电阻r3和电阻r7连接地线;
47.锂电池b4的正极通过继电器j4的常闭端连接锂电池b3的负极,继电器j3的常开端通过串联连接的电阻r4和电阻r8连接地线;
48.锂电池b1的负极、锂电池b2的负极和锂电池b3的负极分别通过可控硅q1、可控硅q2和可控硅q3连接地线,可控硅q1的控制极、可控硅q2的控制极和可控硅q3的控制极均连接所述plc控制器的一个io口;
49.锂电池b4的负极连接地线;
50.继电器j1、继电器j2、继电器j3和继电器j4的线圈均与可控硅q1的控制极连接;
51.所述自锁式继电器km1连接钥匙开关。
52.在正常供电时,锂电池b1、锂电池b2、锂电池b3和锂电池b4通过继电器j1、继电器j2、继电器j3和继电器j4串联在一起,然后再通过自锁式继电器km1输出12v的电池电压为设备供电,plc控制器可以通过检测锂电池b1的正极的电压来检测锂电池组的整体电压,当整体电压过低时,plc控制器可以通过无线通信模块发出电量不足报警,用户可以通过钥匙开关来切换自锁式继电器km1和自锁式继电器km2的自锁状态,从而切换到备用电池组b5供电;
53.用户还可以通过向可控硅q1的控制极发送一个高电平信号,从而控制可控硅q1、可控硅q2和可控硅q3动作,同时也会触发继电器j1、继电器j2、继电器j3和继电器j4动作,从而使锂电池b1、锂电池b2、锂电池b3和锂电池b4相互断开,再通过电阻r1和电阻r5构成的电压取样电路、电阻r2和电阻r6构成的电压取样电路、电阻r3和电阻r7构成的电压取样电路和电阻r4和电阻r8构成的电压取样电路,分别测量锂电池b1、锂电池b2、锂电池b3和锂电池b4的单个电池电压,以判断是否有电池故障,即使进行替换,保证电池组的寿命。
54.优选的,所述备用电池组包括一个锂电池组b5和一个自锁式继电器km2,自锁式继电器km2的自锁控制端连接钥匙开关,锂电池组b5通过自锁式继电器km2输出备用电源,备用电源连接所述稳压芯片。
55.所述自锁式继电器为现有技术,故不详细叙述。
56.优选的,所述稳压芯片的型号为lm7805和12v dc-dc模块。
57.本实用新型所述的一种无人驱鸟车系统,解决了通过agv小车进行无人驱鸟、对agv小车的电池组进行逐个检测的技术问题,本实用新型可以通过da芯片发出pwm信号,从而模拟各种频率的声音,制造用于驱赶鸟类的噪声,驱鸟效果好,本实用新型通过agv小车实现自动驾驶,实现了无人驱鸟,极大的减小了人工工作,本实用新型可以对agv小车的供电电池组进行逐一检测,可以在线快速定位故障电池,确保agv小车的供电维护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1