一种用于农业物联网的自动化灌溉控制装置的制作方法
1.本实用新型涉及农业灌溉设备技术领域,具体为一种用于农业物联网的自动化灌溉控制装置。
背景技术:
2.自动化灌溉控制装置即利用田间布设的相关设备采集或监测土壤信息、田间信息和作物生长信息后并将监测数据传到首部控制中心,在相应系统软件分析决策下,对终端发出相应灌溉管理指令。自动化灌溉控制装置通常在田间设置有用于安装各种设备的灌溉用控制箱,在人们使用了控制箱后,若控制箱的箱门未完全关闭,会使控制箱的箱门容易因天气等原因被意外打开,使得控制箱内的各种设备暴露出来,进而容易使外界雨水等溅入到设备上,造成设备的损坏,鉴于此,我们提出一种用于农业物联网的自动化灌溉控制装置。
技术实现要素:
3.本实用新型的目的在于提供一种用于农业物联网的自动化灌溉控制装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种用于农业物联网的自动化灌溉控制装置,包括控制箱主体,所述控制箱主体的前端铰接有一对箱门,所述箱门的外端拐角处紧密焊接有若干凸臂,所述凸臂中插接有竖轴,所述控制箱主体上设置有踩踏机构,所述踩踏机构包括转动连接在所述控制箱主体底端的踏板、分别位于所述控制箱主体左右两侧的两个拉杆以及套设在所述竖轴上的拉臂,所述踏板的末端紧密焊接有横轴,所述横轴的首末两端均紧密焊接有固定杆,所述固定杆与所述控制箱主体的侧壁之间挂接有勾簧,所述拉杆的首端与所述固定杆的末端铰接,所述拉杆的末端铰接有翘杆,所述翘杆的中部一体成型有凸套,所述凸套与所述控制箱主体转动连接,所述翘杆的末端伸入到所述拉臂的内侧。
6.优选的,所述控制箱主体前端的左右两侧拐角处均紧密焊接有套座,所述横轴的首末两端分别从两个所述套座中穿过并与所述套座转动连接。
7.优选的,所述控制箱主体的左右两端均紧密焊接有挂轴,所述固定杆的侧端面上紧密焊接有凸杆,所述勾簧的首末两端分别挂接在所述挂轴和所述凸杆上。
8.优选的,所述控制箱主体的左右两侧端面上均紧密焊接有固定轴,所述凸套套设在所述固定轴上并与所述固定轴转动连接。
9.优选的,与所述箱门位置相对应的所述控制箱主体的左右两侧端面上均紧密焊接有套板,所述拉臂从所述套板中穿过。
10.优选的,所述套板的内侧端面上开设有侧槽,所述侧槽内设置有挡板,所述挡板的首末两端紧密焊接有凸座,所述凸座通过螺栓固定在所述侧槽中,所述翘杆的末端从两个所述凸座之间穿过。
11.优选的,所述控制箱主体的左右两侧端面上均通过螺栓固定有侧罩。
12.与现有技术相比,本实用新型的有益效果是:
13.该用于农业物联网的自动化灌溉控制装置,通过设置在控制箱主体上的踩踏机构,使得人们在踩踏踏板时,踏板会通过拉杆带动翘杆对拉臂进行拨动,使得拉臂能够将箱门打开,当人员离开踏板时,踩踏机构上勾簧会拉扯拉杆使得箱门能够回复关闭状态,防止使用人员忘记关闭箱门时使得控制箱主体内的设备一直处于暴露状态的情况发生。
附图说明
14.图1为本实用新型的整体结构示意图;
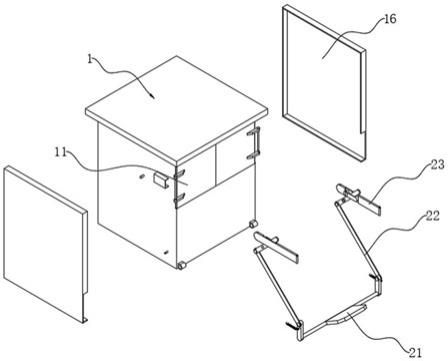
15.图2为本实用新型中整体结构的爆炸图;
16.图3为本实用新型中控制箱主体的结构示意图;
17.图4为本实用新型中踏板的结构示意图;
18.图5为本实用新型中拉杆的结构示意图;
19.图6为本实用新型中拉臂的结构示意图;
20.图7为本实用新型的使用示意图。
21.图中各个称号的意义为:
22.1、控制箱主体;11、箱门;111、凸臂;112、竖轴;12、套座;13、挂轴;14、固定轴;15、套板;16、侧罩;2、踩踏机构;21、踏板;211、横轴;212、固定杆;213、凸杆;214、勾簧;22、拉杆;221、翘杆;222、凸套;23、拉臂;231、侧槽;232、挡板;2321、凸座。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.此外,术语“若干”的含义是两个或两个以上,除非另有明确具体的限定。
26.请参阅图1-图7,本实用新型提供一种技术方案:
27.一种用于农业物联网的自动化灌溉控制装置,包括控制箱主体1,控制箱主体1的前端铰接有一对箱门11,箱门11的外端拐角处紧密焊接有若干凸臂111,凸臂111中插接有竖轴112,控制箱主体1上设置有踩踏机构2,踩踏机构2包括转动连接在控制箱主体1底端的踏板21、分别位于控制箱主体1左右两侧的两个拉杆22以及套设在竖轴112上的拉臂23。
28.本实施例中,踏板21的末端紧密焊接有横轴211,控制箱主体1前端的左右两侧拐角处均紧密焊接有套座12,横轴211的首末两端分别从两个套座12中穿过并与套座12转动连接,使踏板21能够通过横轴211在控制箱主体1上进行转动。横轴211的首末两端均紧密焊
接有固定杆212,固定杆212与控制箱主体1的侧壁之间挂接有勾簧214,控制箱主体1的左右两端均紧密焊接有挂轴13,固定杆212的侧端面上紧密焊接有凸杆213,勾簧214的首末两端分别挂接在挂轴13和凸杆213上,在勾簧214的拉扯下,使得踏板21在无外力作用时在控制箱主体1的前端保持翘起的状态。
29.具体的,拉杆22的首端与固定杆212的末端铰接,拉杆22的末端铰接有翘杆221,翘杆221的中部一体成型有凸套222,控制箱主体1的左右两侧端面上均紧密焊接有固定轴14,凸套222套设在固定轴14上并与固定轴14转动连接,使凸套222与控制箱主体1转动连接,翘杆221的末端伸入到拉臂23的内侧,使得当拉杆22在拉扯翘杆221时,翘杆221会以凸套222为支点对拉臂23进行拨动。
30.进一步的,与箱门11位置相对应的控制箱主体1的左右两侧端面上均紧密焊接有套板15,拉臂23从套板15中穿过,使拉臂23被限制在套板15的内侧,套板15的内侧端面上开设有侧槽231,侧槽231内设置有挡板232,挡板232的首末两端紧密焊接有凸座2321,凸座2321通过螺栓固定在侧槽231中,翘杆221的末端从两个凸座2321之间穿过,使翘杆221的末端被挡板232限制在侧槽231中,防止翘杆221从拉臂23上脱落。当翘杆221在被拉杆22拉动时,翘杆221的末端会在挡板232的内侧对拉臂23拨动,使拉臂23向后拉扯竖轴112,从而使箱门11在拉臂23的拉扯下打开。
31.此外,控制箱主体1的左右两侧端面上均通过螺栓固定有侧罩16,使踩踏机构2的两个被侧罩16罩接在内,达到保护踩踏机构2的目的。
32.值得注意的是,当人们从踏板21上离开时,踏板21会在勾簧214的弹力作用下被拉向控制箱主体1,使得踏板21通过固定杆212对拉杆22进行推动,进而使固定杆212通过翘杆221对拉臂23向前拨动,使拉臂23推动凸臂111,达到关闭箱门11的目的,防止人们忘记关闭箱门11而使控制箱主体1内的设备暴露的情况发生。
33.本实施例的用于农业物联网的自动化灌溉控制装置在使用时,首先使用人员踩踏到踏板21上,使得踏板21通过横轴211在控制箱主体1的前端向下转动,此时横轴211会拉扯勾簧214使勾簧214处于拉伸状态,然后随着横轴211的转动,横轴211通过固定杆212对拉杆22进行拉扯,使得拉杆22对翘杆221拉扯,此时翘杆221会在凸套222的作用下绕固定轴14进行转动,最后随着翘杆221的转动,翘杆221的末端对拉臂23进行拨动,使得拉臂23向后拉扯凸臂111,从而使箱门11打开,达到使用控制箱主体1内设备的目的,当人们从踏板21上离开时,勾簧214对固定杆212拉扯,死固定杆212回到原位,从而使固定杆212通过拉杆22带动翘杆221转动并使翘杆221将拉臂23向前拨动,使箱门11在拉臂23的推挤下被关闭。
34.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1