一种智能可移动的土壤改良装置的制作方法
1.本实用新型涉及环保领域,特别涉及一种智能可移动的土壤改良装置。
背景技术:
2.土壤的改良,其步骤可以包括:先对土壤进行钻孔加药,接着通过钻孔加药后的土壤进行挖掘并破碎,最后将其倒在原处,实现对土壤的改良。
3.在现有技术中,一般先用一部挖掘机,其机械臂上配置有钻头先对土壤进行钻孔,接着用一部带有加药罐的车,对钻孔处进行加药,接着,再用一部车带有破碎机构的车体,对钻孔加药后的土壤进行破碎改良。可以看出,其需要三部车才能实现对土壤进行改良,其浪费人力和物力。
4.有鉴于此,提出本技术。
技术实现要素:
5.本实用新型公开了一种智能可移动的土壤改良装置,旨在改善现有技术中,对土壤改良不便的问题。
6.本实用新型实施例提供了一种智能可移动的土壤改良装置,包括:车体、配置在车体上的机械臂、配置在车体上的加药组件、交替配置在所述机械臂端部的钻头组件和破碎斗、配置在所述车体上的控制器、以及用于控制所述机械臂的操作杆;
7.其中,所述控制器的输入端与所述操作杆电气连接,所述加药组件与所述钻头组件管路连接。
8.优选地,还包括配置在所述加药组件上方的位置传感器;
9.其中,所述位置传感器与所述控制器的输入端电气连接。
10.优选地,所述钻头组件包括:钻杆、第一油马达、以及钻头;
11.其中,所述钻杆的第一端可拆卸的配置在所述机械臂的端部,所述第一油马达配置在所述钻杆的第二端上,所述第一油马达的输出轴与所述钻头的连接。
12.优选地,所述破碎斗的底部中空,且所述破碎斗配置有三滚齿轴以及用于驱动所述三滚齿轴的第二油马达。
13.优选地,所述加药组件包括:加药罐体、软管、以及配置在所述加药罐体内部的抽药泵;
14.其中,所述抽药泵的进水口与所述加药罐体连接,所述抽药泵的出水口与所述软管的第一端连接,所述软管的第二端穿过所述钻头的空心管道,所述抽药泵的控制端与所述控制器的输出端电气连接。
15.优选地,所述控制器为plc控制器。
16.基于本实用新型提供的一种智能可移动的土壤改良装置,通过将所述钻头组件配置在所述机械臂上,对需要钻孔处的土壤进行钻孔,之后通过控制器控制所述加药组件对钻孔处的土壤进行加药,接着通过将所述钻头组件从所述机械臂上拆下,将所述破碎斗配
置在所述机械臂上,对所述土壤进挖掘并破碎,以实现土壤的改良,解决了现有技术中,在进行大规模土壤改良时,步骤繁琐的问题。
附图说明
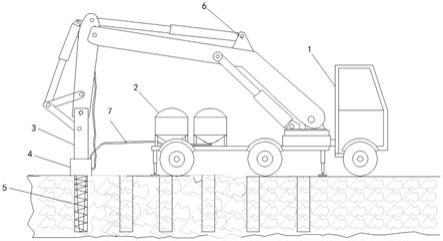
17.图1是本实用新型实施例提供的一种智能可移动的土壤改良装置配置钻头组件示意图;
18.图2是本实用新型实施例提供的一种智能可移动的土壤改良装置配置破碎斗示意图;
19.图3是本实用新型实施例提供的控制模块示意图。
具体实施方式
20.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
21.以下结合附图对本实用新型的具体实施例做详细说明。
22.本实用新型公开了一种智能可移动的土壤改良装置,旨在改善现有技术中,对土壤改良不便的问题。
23.请参阅图1至图3,本实用新型实施例提供了一种智能可移动的土壤改良装置,包括:车体1、配置在车体1上的机械臂6、配置在车体1上的加药组件、交替配置在所述机械臂6端部的钻头5组件和破碎斗8、配置在所述车体1上的控制器10、以及用于控制所述机械臂6的操作杆12;
24.其中,所述控制器10的输入端与所述操作杆12电气连接,所述加药组件与所述钻头5组件管路连接。
25.需要说明的是,在需要对土壤进行改良时,需要对土壤先进行钻孔,接着对钻孔后的土壤进行加药,再接着对加药后的土壤进行挖掘破碎,实现对土壤的改良;
26.在本实施例中,可以通过所述操作杆12控制所述机械臂6,使得所述机械臂6移动到所述车体1的侧部,将所述钻头5组件配置在所述机械臂6的端部上,具体地,本实施例中,所述钻头5组件可以包括钻杆3、第一油马达4、以及钻头5;其中,所述钻杆3的第一端可拆卸的配置在所述机械臂6的端部,所述第一油马达4配置在所述钻杆3的第二端上,所述第一油马达4的输出轴与所述钻头5的连接。
27.需要说明的是,所述操作杆12可以控制所述机械臂6移动,以实现对需要改良的土壤进行钻孔。
28.在本实施例中,还包括配置在所述加药组件上方的位置传感器13;
29.其中,所述位置传感器13与所述控制器10的输入端电气连接。
30.需要说明的是,所述位置传感器13用于检测所述钻孔组件或破碎斗8的位置,在所述钻孔组件或破碎斗8移动到所述加药组件的加药罐体2上方之前提出报警,同时可以限制所述机械臂6的移动,避免所述钻孔组件或破碎斗8的掉落损坏加药罐体2。
31.在本实施例中,所述破碎斗8的底部中空,且所述破碎斗8配置有三滚齿轴以及用于驱动所述三滚齿轴的第二油马达。
32.需要说明的是,在土壤经过钻孔和加药之后,可以通过所述操作杆12将所述机械臂6移动到车体1的侧部,以实现对将所述钻孔组件切换为破碎斗8,可以理解,钻孔组件和破碎斗8可以通过螺栓来固定,当然,还可以采用其他的方式来进行固定,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
33.需要说明的是,在机械臂6的端部更换为所述破碎斗8之后,可以通过所述操作杆12进行移动所述破碎斗8,以实现对钻孔和加药过后的土壤进行挖掘,挖掘在所述破碎斗8内的土壤,可以被所述三滚齿轴进行破碎,经过中空的底部掉落在原处,本实施例中,通过所述第二油马达来驱动所述三滚齿轴以实现对土壤的破碎,在其他实施例中,还可以采用其他的方式来对土壤进行破碎,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
34.在本实施例中,所述加药组件包括:加药罐体2、软管7、以及配置在所述加药罐体2内部的抽药泵11;
35.其中,所述抽药泵11的进水口与所述加药罐体2连接,所述抽药泵11的出水口与所述软管7的第一端连接,所述软管7的第二端穿过所述钻头5的空心管道,所述抽药泵11的控制端与所述控制器10的输出端电气连接。
36.需要说明的是,在本实施例中,所述加药罐体2的数量可以是两个(但不仅限于此),其中,所述抽药泵11由所述控制器10控制,其可以配置有对应的按钮模块来实现开启和关闭所述抽药泵11。
37.在本实施例中,所述控制器10可以为plc控制器10。
38.需要说明的是,所述控制器10还可以是其他类型的控制器10,例如单片机控制器10,其可以用于接收所述位置传感器13的信号、以及操作杆12的信号,实现对机械臂6的控制,这里不做具体限定,但这些方案均在本实用新型的保护范围内。
39.基于本实用新型提供的一种智能可移动的土壤改良装置,通过将所述钻头5组件配置在所述机械臂6上,对需要钻孔处的土壤进行钻孔,之后通过控制器10控制所述加药组件对钻孔处的土壤进行加药,接着通过将所述钻头5组件从所述机械臂6上拆下,将所述破碎斗8配置在所述机械臂6上,对所述土壤进挖掘并破碎,以实现土壤的改良,解决了现有技术中,在进行大规模土壤改良时,步骤繁琐的问题。
40.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1