智能采摘机器人
1.本实用新型涉及蘑菇自动采摘技术领域,具体而言,涉及一种智能采摘机器人。
背景技术:
2.众所周知,常见的蘑菇(食用菌)有:香菇、草菇、蘑菇、木耳、银耳、猴头、竹荪、松口蘑(松茸)、口蘑、红菇和牛肝菌等。
3.目前,蘑菇栽培已经实现了工厂化生产,工厂化菇房内需要安装升温、降温、通风换气和增湿设备等,对温湿度、通气和光照等条件可以实现自动化或半自动化的控制,生产不受季节限制,可以天天出菇,周年生产,产量高,效益好。工厂化菇房一般长20~30米、宽6~10米、高5~6米,房内可顺菇房的长度方向设置2~4列多层床架。床架多用金属结构型材制作,床宽1~1.6米,层数5~6层,层间距50~70厘米,床架最下一层和地面的距离约30厘米,最上一层距屋顶1米以上。床架之间的通道宽80~100厘米,床架和墙壁之间的通道宽40~80厘米。
4.蘑菇生长成熟后,通过自动采摘机器人进行自动采摘作业,节省人力,提高效率,降低成本。参考授权公告号为cn212279177u的实用新型专利,其公开了一种自动采摘机器人,其主要工作过程是,吸盘竖直向下运动至蘑菇的菌盖位置,然后吸住菌盖,再然后吸盘转动一定角度,最后吸盘竖直向上运动完成摘取;该实用新型专利公开的技术方案中,主要存在以下技术缺陷:
5.(1)采摘的蘑菇从基座侧面的出口输出,后续收集工作比较麻烦,需要人工手动收集蘑菇,存在效率低、人工成本高的技术缺陷,多层床架高5~6米也导致收集作业比较困难。
6.(2)蘑菇自动采摘机器人对多层床架的一层完成采摘作业后,需要对另一层作业时,需要人工手动将机器人转移到另一层上,这就降低了生产效率,增加了人工成本,增加了劳动强度。
7.(3)蘑菇自动采摘机器人的采摘效率有待提高。
8.(4)采摘机器人体现大,不适合在狭小空间中工作。
9.(5)自动化程度低、智能化程度低;
10.(6)机器人摘到的蘑菇掉落到转运装置的第一传送同步带608和第二传送同步带609之间的空隙中从而被输送出去,蘑菇一个一个地顺次输送,效率较低,可靠性低。
技术实现要素:
11.本实用新型就是为了解决现有蘑菇采摘机器人自动化程度低、智能化程度低,采摘效率低,体积较大,不适合在狭小空间中工作,蘑菇输送过程效率低、可靠性低的技术问题,提供了一种提供输送效率,提高采摘效率,智能化程度高的智能采摘机器人。
12.本实用新型提供的智能采摘机器人,包括基座、行走机构、采摘执行器、切根输送装置、第一x轴安装板、第二x轴安装板、第一臂运动驱动电机、第2主动同步带轮、第2从动同
步带轮、第2同步带、第1导轨组件、第2导轨组件、第一y轴安装板、第3导轨组件、第一y方向运动驱动电机、第3主动同步带轮、第3同步带、第3从动同步带轮、双目相机支架和双目相机,行走机构与基座连接;第一x轴安装板、第二x轴安装板分别基座固定连接,第一臂运动驱动电机与第一x轴安装板连接,第2主动同步带轮与第一臂运动驱动电机的输出轴连接,第2从动同步带轮与第一x轴安装板连接,第2同步带连接于第2主动同步带轮和第2从动同步带轮之间,第1导轨组件与第一x轴安装板连接,第2导轨组件与第二x轴安装板连接,第一y轴安装板的端部通过同步带连接板与第2同步带连接,第一y轴安装板的一端与第1导轨组件的滑块连接,第一y轴安装板的另一端与第2导轨组件的滑块连接,第3导轨组件与第一y轴安装板连接,第一y方向运动驱动电机与第一y轴安装板连接,第3主动同步带轮与第一y方向运动驱动电机的输出轴连接,第3从动同步带轮与第一y轴安装板连接,第3同步带连接于第3从动同步带轮和第3主动同步带轮之间;双目相机支架与第一y轴安装板连接,双目相机与双目相机支架连接;
13.采摘执行器与第3导轨组件的滑块连接,通过同步带连接板与第3同步带连接;
14.切根输送装置包括基板、推板、推板驱动电机、第1主动同步带轮、第1同步带、第1从动同步带轮、刀片驱动电机、刀片、刀片用同步带轮、刀片转动用主动同步带轮、基板设有蘑菇摆放槽、蘑菇根存放槽、刀片安装槽,蘑菇根存放槽的外侧壁设有缺口,刀片安装槽的侧壁设有过孔,推板设有第一推部和第二推部,推板驱动电机连接在基板的一端,第1主动同步带轮与推板驱动电机的输出轴连接,第1从动同步带轮与基板的另一端连接,第1同步带连接于第1从动同步带轮和第1主动同步带轮之间,推板通过同步带连接件与第1同步带连接,推板的第一推部位于基板的蘑菇摆放槽中,第二推部位于蘑菇根存放槽中;刀片驱动电机连接在基板的一端,同步带轮连接板与刀片安装槽的侧面固定连接,刀片用同步带轮与同步带轮连接板连接,刀片转动用主动同步带轮与刀片驱动电机的输出轴连接,刀片转动用主动同步带轮与刀片用同步带轮之间通过同步带连接,刀片与刀片用同步带轮连接,刀片的一部分穿过刀片安装槽的过孔,刀片位于蘑菇根存放槽的上方,蘑菇根存放槽外侧壁的缺口正对刀片;基板固定连接在基座上,基板位于第一采摘臂的第一y轴安装板的下方;基座的侧面设有蘑菇排料口、切根排料口,蘑菇排料口正对蘑菇摆放槽,切根排料口正对蘑菇根存放槽。
15.优选地,采摘执行器包括电机支架、丝杆电机、螺母座、升降板、第一伸缩板、第二伸缩板、第一同步带轮、第二同步带轮、第一同步带连接板、第一导轨、第二导轨、第三导轨、第三同步带轮、第四同步带轮、第三伸缩板、第一同步带、第二同步带、第二同步带连接板、第三同步带连接板、第四同步带连接板、旋转驱动电机支架、旋转驱动电机、联轴器和自适应吸盘,丝杆电机与电机支架连接,螺母座与丝杆电机的丝杆连接,升降板的一端与螺母座固定连接,升降板的另一端与第一伸缩板固定连接,第一同步带轮与第一伸缩板的上部连接,第二同步带轮与第一伸缩板的下部连接,第一同步带连接于第一同步带轮和第二同步带轮之间,第一同步带的内侧通过第一同步带连接板与电机支架固定连接,第一导轨与电机支架连接,第一伸缩板与第一导轨连接,第二导轨与第一伸缩板连接,第二伸缩板与第二导轨连接,第一同步带的外侧通过第二同步带连接板与第二伸缩板的上部固定连接;第三同步带轮与第二伸缩板的上部连接,第四同步带轮与第二伸缩板的下部连接,第二同步带连接于第三同步带轮和第四同步带轮之间,第三导轨与第二伸缩板连接,第三伸缩板与第
三导轨连接,第二同步带的内侧通过第三同步带连接板与第一伸缩板的下部固定连接,第二同步带的外侧通过第四同步带连接板与第三伸缩板的上部固定连接;旋转驱动电机支架与第三伸缩板固定连接,旋转驱动电机与旋转驱动电机支架连接;自适应吸盘包括抽气接头、进气接头、基座、柔性吸杯和连接块,基座设有中心通孔,柔性吸杯设有平面部和圆圈型隆起部,平面部设有中心通孔和气孔,圆圈型隆起部是中空的,圆圈型隆起部设有内腔,圆圈型隆起部的横截面为圆弧形,平面部的气孔与圆圈型隆起部的内腔连通,平面部的中心通孔与圆圈型隆起部的中部空间连通;平面部与基座固定连接,基座的中心通孔与平面部的中心通孔连通;连接块与基座固定连接,连接块的内部设有空气通道,连接块的侧面设有侧面开口,连接块内部的空气通道与基座的中心通孔连通,抽气接头与连接块的侧面开口连接,抽气接头与连接块内部的空气通道连通,进气接头与连接块连接,进气接头插入平面部的气孔中;连接块的上部通过轴承与第三伸缩板转动连接,旋转驱动电机的输出轴通过联轴器与连接块的上部固定连接;采摘执行器的安装板与第导轨组件的滑块连接,采摘执行器的安装板通过同步带连接板与第3同步带连接。
16.优选地,切根输送装置中刀片有四个,分别是第一刀片、第二刀、第三刀片、第四刀片;切根输送装置还包括刀片转动用同步带、第一刀片用同步带轮、第二刀片用同步带轮、第三刀片用同步带轮、第四刀片用同步带轮、第一张紧轴承、第二张紧轴承、第三张紧轴承和第四张紧轴承,蘑菇根存放槽的外侧壁设有第一缺口、第二缺口、第三缺口、第四缺口,刀片安装槽的侧壁设有第一过孔、第二过孔、第三过孔、第四过孔,第一刀片用同步带轮、第二刀片用同步带轮、第三刀片用同步带轮、第四刀片用同步带轮分别与同步带轮连接板连接,第一张紧轴承、第二张紧轴承、第三张紧轴承和第四张紧轴承分别与同步带轮连接板连接,第一张紧轴承位于刀片转动用主动同步带轮和第一刀片用同步带轮之间,第二张紧轴承位于第一刀片用同步带轮和第二刀片用同步带轮之间,第三张紧轴承位于第二刀片用同步带轮和第三刀片用同步带轮之间,第四张紧轴承位于第三刀片用同步带轮和第四刀片用同步带轮之间,刀片转动用主动同步带轮、第一刀片用同步带轮、第二刀片用同步带轮、第三刀片用同步带轮和第四刀片用同步带轮之间通过刀片转动用同步带连接,刀片转动用同步带绕过第一张紧轴承、第二张紧轴承、第三张紧轴承和第四张紧轴承,第一刀片与第一刀片用同步带轮连接,第二刀片与第二刀片用同步带轮连接,第三刀片与第三刀片用同步带轮连接,第四刀片与第四刀片用同步带轮连接,第一刀片的一部分穿过刀片安装槽的第一过孔,第二刀片的一部分穿过刀片安装槽的第二过孔,第三刀片的一部分穿过刀片安装槽的第三过孔,第四刀片的一部分穿过刀片安装槽的第四过孔,第一刀片、第二刀片、第三刀片、第四刀片位于蘑菇根存放槽的上方,蘑菇根存放槽外侧壁的第一缺口正对第一刀片,第二缺口正对第二刀片,第三缺口正对第三刀片,第四缺口正对第四刀片。
17.优选地,基座的侧面连接有用于跟随的光线接收器,用于跟随的光线接收器连接有设有缝隙的遮光板。
18.优选地,基座的侧面连接有用于位置检测的光线发射器,用于位置检测的光线发射器连接有设有缝隙的遮光板。
19.本实用新型是在参考授权公告号为cn212279177u的实用新型专利基础上的改进、优化。
20.本实用新型的有益效果是,自动化程度高、智能化程度高,作业效率高,运行可靠、
稳定,降低人工成本,实现了无人作业,提高采摘效果。采摘机器人结构紧凑、体积小,能够对各种空间位置的蘑菇进行采摘,提高采摘效果。
21.机器人输送蘑菇效率高,适合大批量蘑菇的输送。具有切根功能,工人收集蘑菇后不再对蘑菇进行切根作业,降低人工成本,提高蘑菇后续加工的效率。
22.多级伸缩装置结构紧凑,设计巧妙,在收缩状态下体积小,高度小,。自适应吸盘和多级伸缩装置组成的采摘执行器体积小,运动灵活,有利于对各种空间位置的蘑菇进行采摘。
23.本实用新型进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
24.图1是智能采摘系统的立体图;
25.图2是智能采摘系统的主视图;
26.图3是智能采摘系统的左视图;
27.图4是智能采摘系统的右视图;
28.图5是智能采摘系统的后视图;
29.图6是智能采摘系统的立体图;
30.图7是图1中m处的局部放大图;
31.图8是图1中n处的局部放大图;
32.图9是图6中p处的局部放大图;
33.图10是无人值守接料装置的立体图;
34.图11是无人值守接料装置的立体图;
35.图12是无人值守接料装置的立体图;
36.图13是无人值守接料装置的主视图;
37.图14是无人值守接料装置的侧视图;
38.图15是无人值守接料装置的后视图;
39.图16是无人值守接料装置的俯视图;
40.图17是图10中第一行走轮、第二行走轮连接结构示意图;
41.图18是图11中q处的局部放大图;
42.图19是自动换层装置的立体图;
43.图20是自动换层装置的立体图;
44.图21是自动换层装置的侧视图;
45.图22是图20中s处的局部放大图;
46.图23是图22中限位轮与矩形框架中立柱的棱边连接的示意图;
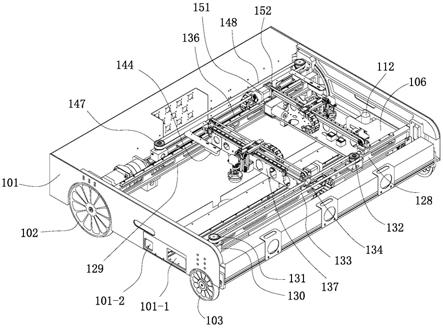
47.图24是自动采摘机器人的立体图;
48.图25是自动采摘机器人的俯视图;
49.图26是自动采摘机器人的立体图;
50.图27是图24中采摘执行器与第一组采摘臂连接的结构图;
51.图28是图24所示自动采摘机器人中切根输送装置的立体图;
52.图29是图28所示结构的主视图;
53.图30是图28所示结构的左视图;
54.图31是图28所示结构的右视图;
55.图32切根输送装置的结构示意图;
56.图33是切根输送装置的立体图;
57.图34是切根输送装置的仰视图;
58.图35是图28所示结构中,刀片安装槽的侧壁设有第四过孔的结构示意图;
59.图36是图1中收集蘑菇部位的局部放大图;
60.图37是设有多级伸缩结构的采摘装置的立体图;
61.图38是图37所示结构的主视图;
62.图39是图37所示结构的右视图;
63.图40是图37所示结构的后视图;
64.图41是具有多级伸缩结构的采摘装置另一视角的立体图;
65.图42是图41所示结构的侧视图;
66.图43是图37所示结构中,旋转驱动电机安装在第三伸缩板上,自适应吸盘安装方式示意图;
67.图44是图43所示结构的剖视图;
68.图45是图43所示结构中,进气接头安装在连接块上并与柔性吸杯的气孔连通的示意图;
69.图46是图43所示结构中,连接块的侧面开口,连接块的空气通道与基座的中心通孔连通的示意图;
70.图47是设有多级伸缩结构的采摘装置初始状态的结构示意图;
71.图48是设有多级伸缩结构的采摘装置初始状态的结构示意图。
72.图中符号说明:
73.100.自动采摘机器人,101.基座,101-1.蘑菇排料口,101-2.切根排料口,102.主动转轮,103.从动转轮,104.行走驱动电机,105.基板,105-1.蘑菇摆放槽,105-2.蘑菇根存放槽,105-2-1.第一缺口,105-2-2.第二缺口,105-2-3.第三缺口,105-2-4.第四缺口,105-3.刀片安装槽,105-3-1.第四过孔,106.推板,106-1.第一推部,106-2.第二推部,107.滑轨,108.推板驱动电机,109.第1主动同步带轮,110.第1同步带,111.第1从动同步带轮,112.刀片驱动电机,113.同步带轮连接板,114.刀片转动用同步带,115.第一刀片,116.第二刀片,117.第三刀片,118.第四刀片,119.第一刀片用同步带轮,120.第二刀片用同步带轮,121.第三刀片用同步带轮,122.第四刀片用同步带轮,123.刀片转动用主动同步带轮,124.第一张紧轴承,125.第二张紧轴承,126.第三张紧轴承,127.第四张紧轴承,128.第一x轴安装板,129.第二x轴安装板,130.第一臂运动驱动电机,131.第2主动同步带轮,132.第2从动同步带轮,133.第2同步带,134.同步带连接板,135.第1导轨组件,136.第2导轨组件,137.第一y轴安装板,138.第3导轨组件,139.第一y方向运动驱动电机,140.第3主动同步带轮,141.第3同步带,142.第3从动同步带轮,143.双目相机支架,144.双目相机,145.第二臂运动驱动电机,146.第4主动同步带轮,147.第4从动同步带轮,148.第4同步带,149.第二y轴安装板,150.第4导轨组件,151.第二y方向运动驱动电机,152.第5主动同步带轮,153.第5同步带,154.第5从动同步带轮,155.双目相机支架,156.双目相机,191.用于跟随的光线
接收器,192.用于位置检测的光线发射器,193.遮光板,193-1.缝隙,194.遮光板;
74.200.无人值守接料装置,201.竖直支架,202.支撑轮,203.主动轮,204-1.第一行走轮,204-2.第二行走轮,205.流转驱动电机,206.流转链条,207.上支撑板,208.下支撑板,209.主动链轮连接座,210.流转主动同步带轮,211.流转同步带,212.主动链轮转轴,213.主动链轮,214.第一从动链轮,215.第二从动链轮,216.第三从动链轮,217.第四从动链轮,218.第五从动链轮,219.托盘,220.托盘连接轴,221.行走驱动电机,222.张紧轮,223.第一同步带轮,224.第二同步带轮,225.行走同步带,226.从动同步带轮,227.蘑菇存放筐,228.用于跟随的第一光线发射器,228-1.遮光板,229.用于跟随的第二光线发射器,230.用于跟随的第三光线发射器,231.用于跟随的第四光线发射器,232.用于跟随的第五光线发射器,233.用于跟随的第六光线发射器,234.用于位置检测的第一光线接收器,234-1.遮光板,
75.300.自动换层装置,301.矩形框架,302.平台升降驱动电机,303.中间传动轴,304.左主动链轮,305.右主动链轮,306.左轴承座,307.右轴承座,308.左张紧链轮,309.左变向链轮,310.右张紧链轮,311.右变向链轮,312.减速机,313.左链条,314.右链条,315.平台,316.左配重块,317.右配重块,318.左导轨,319.右导轨,320.左三角架,321.右三角架,322.左辅助轨道,323.右辅助轨道,324.限位轮,325.充电桩,326.第一位置传感器,327.第二位置传感器,328.第三位置传感器,329.第四位置传感器,330.第五位置传感器,331.第六位置传感器;400.多层床架;
76.1.安装板,2.电机支架,3.丝杆电机,3-1.丝杆,4.升降板,5.第一伸缩板,6.第二伸缩板,7.第一同步带轮,8.第二同步带轮,9.第一同步带连接板,10.第一导轨,11.第二导轨,12.第三导轨,13.第三同步带轮,14.第四同步带轮,15.第三伸缩板,16.螺母座,17.第一同步带,18.第二同步带,19.第二同步带连接板,20.第三同步带连接板,21.第四同步带连接板,22.旋转驱动电机支架,23.旋转驱动电机,24.联轴器,25.轴承,26.抽气接头,27.进气接头,28.基座,28-1.连接孔,28-2.中心通孔,29.柔性吸杯,29-1.平面部,29-1-1.中心通孔,29-1-2.气孔,29-2.圆圈型隆起部,29-2-1.内腔,30.连接块,30-1.空气通道,30-2.侧面开口,31.抽气管,32.第一光耦,33.第二光耦,34.感应片。
具体实施方式
77.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
78.如图1-6所示,智能采摘系统包括自动采摘机器人100、无人值守接料装置200、自动换层装置300。
79.如图10-18所示,无人值守接料装置200包括竖直支架201、支撑轮202、主动轮203、第一行走轮204-1、第二行走轮204-2、流转驱动电机205、流转链条206、上支撑板207、下支撑板208、主动链轮连接座209、流转主动同步带轮210、流转同步带211、主动链轮转轴212、主动链轮213、第一从动链轮214、第二从动链轮215、第三从动链轮216、第四从动链轮217、第五从动链轮218、托盘219、托盘连接轴220、行走驱动电机221、张紧轮222、第一同步带轮223、第二同步带轮224、行走同步带225、从动同步带轮226、用于跟随的第一光线发射器228、用于跟随的第二光线发射器229、用于跟随的第三光线发射器230、用于跟随的第四光线发射器231、用于跟随的第五光线发射器232、用于跟随的第六光线发射器233、用于位置
检测的第一光线接收器234、用于位置检测的第二光线接收器、用于位置检测的第三光线接收器、用于位置检测的第四光线接收器、用于位置检测的第五光线接收器、用于位置检测的第六光线接收器,两个支撑轮202与竖直支架201的底部转动连接,上支撑板207与竖直支架201的上部固定连接,下支撑板208与竖直支架201的下部固定连接,主动链轮连接座209与竖直支架201的顶部固定连接,流转驱动电机205固定安装在上支撑板207上,流转主动同步带轮210与流转驱动电机205的输出轴连接,主动链轮转轴212的一端与主动链轮213固定连接,主动链轮转轴212的另一端通过轴承与主动链轮连接座209转动连接,从动同步带轮226与主动链轮转轴212连接,流转同步带211连接于流转主动同步带轮210和从动同步带轮226之间,第一从动链轮214与上支撑板207的一端转动连接,第二从动链轮215与上支撑板207的另一端转动连接,第三从动链轮216与下支撑板208的一端转动连接,第四从动链轮217与下支撑板208的中部转动连接,第五从动链轮218与下支撑板208的另一端转动连接,流转链条206分别与主动链轮213、第一从动链轮214、第二从动链轮215、第三从动链轮216、第四从动链轮217、第五从动链轮218连接,托盘连接轴220与流转链条206固定连接,托盘219与托盘连接轴220转动连接,有多个托盘219安装在流转链条206上;行走驱动电机221固定安装在竖直支架201的上部,主动轮203与行走驱动电机221的输出轴连接,张紧轮222与竖直支架201的上部转动连接,第一行走轮204-1通过第一行走轮转轴与竖直支架201的上部转动连接,第二行走轮204-2通过第二行走轮转轴与竖直支架201的上部转动连接,第一同步带轮223与第一行走轮转轴连接,第二同步带轮224与第二行走轮转轴连接,行走同步带225分别与主动轮203、第二同步带轮224、张紧轮222、第一同步带轮223连接。图中显示有20个托盘219,一个托盘上放置一个蘑菇存放筐227,一共可以放置20个蘑菇存放筐。
80.如图1、2、3和7所示,两个支撑轮202与多层床架400的底部紧贴。如图1、2、6和9所示,第一行走轮204-1和第二行走轮204-2置于多层床架400顶部边缘,当行走驱动电机221工作,行走驱动电机221通过主动轮203、行走同步带225带动第一同步带轮223和第二同步带轮224转动,第一同步带轮223、第二同步带轮224分别带动第一行走轮204-1、第二行走轮204-2旋转,进而,第一行走轮204-1和第二行走轮204-2带动整个无人值守接料装置沿着多层床架400长度方向移动,整个无人值守接料装置移动的过程中,两个支撑轮202随动。用于跟随的第一光线发射器228、用于跟随的第二光线发射器229、用于跟随的第三光线发射器230、用于跟随的第四光线发射器231、用于跟随的第五光线发射器232、用于跟随的第六光线发射器233、用于位置检测的第一光线接收器234、用于位置检测的第二光线接收器、用于位置检测的第三光线接收器、用于位置检测的第四光线接收器、用于位置检测的第五光线接收器和用于位置检测的第六光线接收器分别与竖直支架201连接。用于跟随的第一光线发射器228、用于跟随的第二光线发射器229、用于跟随的第三光线发射器230、用于跟随的第四光线发射器231、用于跟随的第五光线发射器232和用于跟随的第六光线发射器233从下向上分布相当于六层,用于位置检测的第一光线接收器234、用于位置检测的第二光线接收器、用于位置检测的第三光线接收器、用于位置检测的第四光线接收器、用于位置检测的第五光线接收器和用于位置检测的第六光线接收器从下向上分布相当于六层。遮光板228-1与用于跟随的第一光线发射器228连接,遮光板228-1上设有缝隙228-1-1,用于跟随的第一光线发射器228发出的光纤从缝隙228-1-1射出;同理,其他五个用于跟随的光纤发射器上也连接有遮光板。用于位置检测的第一光线接收器234上连接有遮光板234-1,遮光板
234-1设有缝隙,第一光线接收器234接收从遮光板234-1上的缝隙穿过的光纤,同理,其他五个用于位置检测的光线接收器也连接有遮光板。如图1和8所示,用于跟随的光线接收器191、用于位置检测的光线发射器192分别与自动采摘机器人100基座的侧面连接,遮光板193与用于跟随的光线接收器191连接,遮光板193设有缝隙193-1,遮光板194与用于位置检测的光线发射器192连接,遮光板194设有缝隙。用于跟随的第二光线发射器229和用于跟随的光线接收器191组成一个对射式光电开关;用于位置检测的光线发射器192和用于位置检测的第二光线接收器组成一个对射式光电开关。当自动采摘机器人100移动至某一个位置,外部控制器指令行走驱动电机221工作,第一行走轮204-1和第二行走轮204-2转动使整个无人值守接料装置200平移,当用于跟随的光线接收器191接收到用于跟随的第二光线发射器229发出的光线时反馈信号为外部控制器(用于跟随的第二光线发射器229正对当用于跟随的光线接收器191),外部控制器指令行走驱动电机221停止工作,无人值守接料装置200停止移动(无人值守接料装置200运动到位),实现无人值守接料装置200跟随自动采摘机器人100的功能。当用于跟随的光线接收器191接收到用于跟随的第二光线发射器229发出的光线的同时,用于位置检测的第二光线接收器接收到用于位置检测的光线发射器192的光线时并反馈信号给机器人的控制器,机器人的控制器判断无人值守接料装置已经到位,此时机器人才进行采摘作业。当用于位置检测的第二光线接收器没有接收到用于位置检测的光线发射器192的光线时,机器人停机不进行采摘作业。遮光板能够提高检测精度。
81.如图19-22所示,自动换层装置300包括矩形框架301、平台升降驱动电机302、中间传动轴303、左主动链轮304、右主动链轮305、左轴承座306、右轴承座307、左张紧链轮308、左变向链轮309、右张紧链轮310、右变向链轮311、减速机312、左链条313、右链条314、平台315、左配重块316、右配重块317、左导轨318、右导轨319、左三角架320、右三角架321、左辅助轨道322、右辅助轨道323、限位轮324、充电桩325、第一位置传感器326、第二位置传感器327、第三位置传感器328、第四位置传感器329、第五位置传感器330和第六位置传感器331,平台升降驱动电机302固定安装在矩形框架301的顶部,减速机312固定安装在矩形框架301的顶部,减速机312与平台升降驱动电机302连接,中间传动轴303与减速机312连接,左轴承座306固定安装在矩形框架301的顶部,右轴承座307固定安装在矩形框架301的顶部,中间传动轴303的左端与左轴承座306连接,中间传动轴303的右端与右轴承座307连接,左主动链轮304与中间传动轴303的左端连接,右主动链轮305与中间传动轴303的右端连接,左张紧链轮308通过轴承座与矩形框架301的顶部转动连接,左变向链轮309通过轴承座与矩形框架301的顶部转动连接,右张紧链轮310通过轴承座与矩形框架301的顶部转动连接,右变向链轮311通过轴承座与矩形框架301的顶部转动连接,左链条313绕过左主动链轮304、左张紧链轮308、左变向链轮309,右链条314绕过右主动链轮305、右张紧链轮310、右变向链轮311,左三角架320与平台315的左侧固定连接,右三角架321与平台315的右侧固定连接,平台315位于矩形框架301中,左链条313的一端与左三角架320固定连接,左链条313的另一端与左配重块316连接,右链条314的一端与右三角架321固定连接,右链条314的另一端与右配重块317连接;左导轨318固定安装在矩形框架301左侧,右导轨319固定安装在矩形框架301右侧,左配重块316通过滚轮与左导轨318滑动连接,右配重块317通过滚轮与右导轨319滑动连接;充电桩325安装在平台315上;矩形框架301从下向上分六层;每一层的出口两侧安装左辅助轨道322、右辅助轨道323,能够让机器人的行走机构的轮子更容易地运动到平
台上。平台315的四个角上分别安装一个限位轮324,限位轮324设有环槽,限位轮324上的环槽卡在矩形框架301的立柱的棱边上(如图22和23所示),一共有四个限位轮324;如图22和23所示,优选地,平台315的两侧分别设有适应自动采摘机器人的行走机构中轮子的轨道315-1,能够让机器人更准确、稳定地运动到平台上;第一位置传感器326、第二位置传感器327、第三位置传感器328、第四位置传感器329、第五位置传感器330和第六位置传感器331从下向上安装在矩形框架301的第一至六层的边缘位置。
82.自动换层装置300的工作过程是,平台升降驱动电机302工作从而驱动中间传动轴303旋转,中间传动轴303带动左主动链轮304和右主动链轮305旋转,左主动链轮304、右主动链轮305带动左链条313、右链条314运动,左链条313、右链条314使平台315升降,平台315可以从图19、21所处第一层上升至第二层,当平台315上升到第二层时,第二位置传感器327检测到平台位于第二层;当平台315上升到第六层时,第六位置传感器331检测到平台位于第六层。平台315可以从第六层下降至第一层。当平台315升降运动的过程中,四个限位轮324能够保证平台平稳运动,防止平台倾覆。当自动采摘机器人100运动到平台315上,充电桩325能够给自动采摘机器人100中的蓄电池充电。
83.如图1、2、3所示,自动换层装置300靠近多层床架400的沿长度方向的前部。
84.如图24-27所示,自动采摘机器人100包括基座101、蓄电池、行走机构、采摘执行器、切根输送装置、第一x轴安装板128、第二x轴安装板129、第一臂运动驱动电机130、第2主动同步带轮131、第2从动同步带轮132、第2同步带133、同步带连接板134、第1导轨组件135、第2导轨组件136、第一y轴安装板137、第3导轨组件138、第一y方向运动驱动电机139、第3主动同步带轮140、第3同步带141、第3从动同步带轮142、双目相机支架143、双目相机144。
85.行走机构设有两个主动转轮102和两个从动转轮103以及行走驱动电机104,两个主动转轮102安装在基座101的两侧,两个从动转轮103安装在基座101的两侧,行走驱动电机104安装在基座101上,行走驱动电机104通过轴驱动两个主动转轮102旋转。行走机构还可以采用其他现有技术。蓄电池安装在基座上。切根输送装置包括基板105、推板106、滑轨107、推板驱动电机108、第1主动同步带轮109、第1同步带110、第1从动同步带轮111、刀片驱动电机112、同步带轮连接板113、刀片转动用同步带114、第一刀片115、第二刀片116、第三刀片117、第四刀片118、第一刀片用同步带轮119、第二刀片用同步带轮120、第三刀片用同步带轮121、第四刀片用同步带轮122、刀片转动用主动同步带轮123、第一张紧轴承124、第二张紧轴承125、第三张紧轴承126和第四张紧轴承127,基板105设有蘑菇摆放槽105-1、蘑菇根存放槽105-2、刀片安装槽105-3,蘑菇根存放槽105-2的外侧壁设有第一缺口105-2-1、第二缺口105-2-2、第三缺口105-2-3、第四缺口105-2-4,刀片安装槽105-3的侧壁设有第一过孔、第二过孔、第三过孔、第四过孔105-3-1,推板106设有第一推部106-1和第二推部106-2,推板驱动电机108安装在基板105的一端,第1主动同步带轮109与推板驱动电机108的输出轴连接,第1从动同步带轮111与基板105的另一端连接,第1同步带110连接于第1从动同步带轮111和第1主动同步带轮109之间,推板106通过同步带连接件与第1同步带110连接,推板106的第一推部106-1位于基板105的蘑菇摆放槽105-1中,第二推部106-2位于蘑菇根存放槽105-2中,滑轨107与蘑菇摆放槽105-1的侧面连接,第一推部106-1与滑轨107连接,刀片驱动电机112安装在基板105的一端,同步带轮连接板113与刀片安装槽105-3的侧面固定连接,第一刀片用同步带轮119、第二刀片用同步带轮120、第三刀片用同步带轮121、第四
刀片用同步带轮122分别与同步带轮连接板113连接,刀片转动用主动同步带轮123与刀片驱动电机112的输出轴连接,第一张紧轴承124、第二张紧轴承125、第三张紧轴承126和第四张紧轴承127分别与同步带轮连接板113连接,第一张紧轴承124位于刀片转动用主动同步带轮123和第一刀片用同步带轮119之间,第二张紧轴承125位于第一刀片用同步带轮119和第二刀片用同步带轮120之间,第三张紧轴承126位于第二刀片用同步带轮120和第三刀片用同步带轮121之间,第四张紧轴承127位于第三刀片用同步带轮121和第四刀片用同步带轮122之间,刀片转动用主动同步带轮123、第一刀片用同步带轮119、第二刀片用同步带轮120、第三刀片用同步带轮121和第四刀片用同步带轮122之间通过刀片转动用同步带114连接,刀片转动用同步带114绕过第一张紧轴承124、第二张紧轴承125、第三张紧轴承126和第四张紧轴承127,第一刀片115与第一刀片用同步带轮119的中心固定连接,第二刀片116与第二刀片用同步带轮120的中心固定连接,第三刀片117与第三刀片用同步带轮121的中心固定连接,第四刀片118与第四刀片用同步带轮122的中心固定连接,第一刀片115的一部分穿过刀片安装槽105-3的第一过孔,第二刀片116的一部分穿过刀片安装槽105-3的第二过孔,第三刀片117的一部分穿过刀片安装槽105-3的第三过孔,第四刀片118的一部分穿过刀片安装槽105-3的第四过孔105-3-1。第一刀片115、第二刀片116、第三刀片117、第四刀片118位于蘑菇根存放槽105-2的上方。蘑菇根存放槽105-2外侧壁的第一缺口105-2-1正对第一刀片115,第二缺口105-2-2正对第二刀片116,第三缺口105-2-3正对第三刀片117,第四缺口105-2-4正对第四刀片118。基板105固定安装在基座101上,基板105位于第一采摘臂的第一y轴安装板137的下方。如图24和26所示,基座101的侧面设有蘑菇排料口101-1、切根排料口101-2,蘑菇排料口101-1正对蘑菇摆放槽105-1,切根排料口101-2正对蘑菇根存放槽105-2。当蘑菇被平移,蘑菇的根部先经过第四缺口105-2-4后向第四刀片118方向移动,经过高速旋转的第四刀片118时蘑菇的根部被切断。
86.第一x轴安装板128与基座101固定连接,第二x轴安装板129与基座101固定连接,第一臂运动驱动电机130安装在第一x轴安装板128上,第2主动同步带轮131与第一臂运动驱动电机130的输出轴连接,第2从动同步带轮132与第一x轴安装板128连接,第2同步带133连接于第2主动同步带轮131和第2从动同步带轮132之间,第1导轨组件135与第一x轴安装板128连接,第2导轨组件136与第二x轴安装板129连接,第一y轴安装板137的端部通过同步带连接板134与第2同步带133连接,第一y轴安装板137的一端与第1导轨组件135的滑块连接,第一y轴安装板137的另一端与第2导轨组件136的滑块连接,第3导轨组件138与第一y轴安装板137连接,第一y方向运动驱动电机139安装在第一y轴安装板137上,第3主动同步带轮140与第一y方向运动驱动电机139的输出轴连接,第3从动同步带轮142与第一y轴安装板137连接,第3同步带141连接于第3从动同步带轮142和第3主动同步带轮140之间。双目相机支架143与第一y轴安装板137连接,双目相机144与双目相机支架143连接。采摘执行器的安装板1与第3导轨组件138的滑块连接,安装板1通过同步带连接板与第3同步带141连接,启动第一y方向运动驱动电机139能够安装板1沿y轴方向运动,也就是带动整个采摘执行器沿y轴方向运动。
87.如图37-48所示,采摘执行器包括安装板1、电机支架2、丝杆电机3、升降板4、第一伸缩板5、第二伸缩板6、第一同步带轮7、第二同步带轮8、第一同步带连接板9、第一导轨10、第二导轨11、第三导轨12、第三同步带轮13、第四同步带轮14、第三伸缩板15、螺母座16、第
一同步带17、第二同步带18、第二同步带连接板19、第三同步带连接板20、第四同步带连接板21、旋转驱动电机支架22、旋转驱动电机23、联轴器24、轴承25、自适应吸盘。电机支架2与安装板1固定连接,丝杆电机3固定安装在电机支架2上,螺母座16与丝杆电机3的丝杆3-1连接,升降板4的一端与螺母座16固定连接,升降板4的另一端通过螺钉与第一伸缩板5固定连接,第一同步带轮7与第一伸缩板5的上部连接,第二同步带轮8与第一伸缩板5的下部连接,第一同步带17连接于第一同步带轮7和第二同步带轮8之间,第一同步带17的内侧通过第一同步带连接板9与电机支架2固定连接,第一导轨10与电机支架2连接,第一伸缩板5与第一导轨10连接,第二导轨11与第一伸缩板5连接,第二伸缩板6与第二导轨11连接,第一同步带17的外侧通过第二同步带连接板19与第二伸缩板6的上部固定连接;第三同步带轮13与第二伸缩板6的上部连接,第四同步带轮14与第二伸缩板6的下部连接,第二同步带18连接于第三同步带轮13和第四同步带轮14之间,第三导轨12与第二伸缩板6连接,第三伸缩板15与第三导轨12连接,第二同步带18的内侧通过第三同步带连接板20与第一伸缩板5的下部固定连接,第二同步带18的外侧通过第四同步带连接板21与第三伸缩板15的上部固定连接。旋转驱动电机支架22通过螺钉与第三伸缩板15固定连接,旋转驱动电机23固定安装在旋转驱动电机支架22上。自适应吸盘包括抽气接头26、进气接头27、基座28、柔性吸杯29、连接块30,基座28设有中心通孔28-2和四个连接孔28-1,柔性吸杯29设有平面部29-1、圆圈型隆起部29-2,平面部29-1设有中心通孔29-1-1和气孔29-1-2,圆圈型隆起部29-2是中空的,圆圈型隆起部29-2设有内腔29-2-1,圆圈型隆起部29-2的横截面为圆弧形,气孔29-1-2与圆圈型隆起部29-2的内腔29-2-1连通,平面部29-1的中心通孔29-1-1与圆圈型隆起部29-2的中部空间29-2-2连通;可以在平面部29-1上固定连接四个连接柱,这四个连接柱插入四个连接孔28-1中实现平面部29-1与基座28的固定连接,也可以通过用胶水粘接等其他方式实现平面部29-1与基座28的固定连接;基座28的中心通孔28-2与平面部29-1的中心通孔29-1-1连通;连接块30与基座28固定连接(也可以使连接块30和基座28一体成型),连接块30的内部设有空气通道30-1,连接块30的侧面设有侧面开口30-2,连接块30内部的空气通道30-1与基座28的中心通孔28-2连通,抽气接头26与连接块30的侧面开口30-2连接从而使抽气接头26与连接块30内部的空气通道30-1连通,进气接头27与连接块30连接,进气接头27插入平面部29-1的气孔29-1-2中从而实现进气接头27与圆圈型隆起部29-2的内腔29-2-1连通。连接块30的上部通过轴承25与第三伸缩板15转动连接,旋转驱动电机23的输出轴通过联轴器24与连接块30的上部固定连接。柔性吸杯29的材质可以是硅胶、橡胶、热塑性弹性体tpe或热塑性橡胶tpr等柔性材料。采摘执行器工作时,使抽气管31的一端与抽气接头26连接,外部负压泵与抽气管31的另一端连接。用一根送气管与进气接头27连接。如图47和48,采摘装置处于初始状态下,第三伸缩板15、第一伸缩板5和第二伸缩板6收拢沿水平方向并排布置,此时升降板4位于电机支架2的上端位置。通过送气管和进气接头27向自适应吸盘的圆圈型隆起部的内腔29-2-1充入一定量的空气(可以根据吸附对象的不同调整充入空气的量)。通过视觉识别技术等其他方式获得蘑菇的位置,丝杆电机3动作驱动升降板4向下运动,升降板4带动第一伸缩板5沿着第一导轨10向下运动,第一同步带轮7和第二同步带轮8同时旋转,第一同步带17转动,第二同步带连接板19随着第一同步带17向下运动,第二同步带连接板19带动第二伸缩板6沿着第二导轨11向下运动,第二伸缩板6向下运动的同时第三同步带轮13、第四同步带轮14同时旋转,第二同步带18转动,第四同步带连接板21随着第二
同步带18向下运动,第四同步带连接板21带动第三伸缩板15向下运动,第三伸缩板15带动旋转驱动电机支架22、旋转驱动电机23和自适应吸盘向下运动,此时采摘装置处于图37所示的伸展状态(第一伸缩板5、第二伸缩板6和第三伸缩板15沿竖直方向顺次分布),从而实现将自适应吸盘竖直向下移动。柔性吸杯29压下蘑菇的菌盖,圆圈型隆起部29-2下压菌盖,圆圈型隆起部29-2随之变形进而与菌盖的顶部紧密贴合,此时,圆圈型隆起部29-2的中部空间29-2-2和菌盖的顶部区域就形成了密闭腔室,然后启动外部负压泵将形成的密闭腔室中的空气抽走,产生局部真空,进而圆圈型隆起部29-2将菌盖吸住。接下来,旋转驱动电机23工作,通过连接块30带动自适应吸盘转动一定角度,自适应吸盘带动蘑菇转动一定角度将蘑菇的菇柄拧断,蘑菇被摘掉。接下来,丝杆电机3反方向旋转,升降板4带动第一伸缩板5向上运动,参考图37,第一同步带17转动,第二同步带连接板19随着第一同步带17向上运动,第二同步带连接板19带动第二伸缩板6向上运动,第二伸缩板6向上运动的同时第二同步带18转动,第四同步带连接板21随着第二同步带18向上运动,第四同步带连接板21带动第三伸缩板15向上运动,第三伸缩板15带动旋转驱动电机支架22、旋转驱动电机23和自适应吸盘向上运动,最终使采摘装置处于图47所示初始的收缩状态。这个过程中,自适应吸盘带着蘑菇向上移动。当负压泵泄压时,蘑菇会自由掉落(有时候可能会发生因为蘑菇自重较小而不能自主下落的情况,针对这种情况,给圆圈型隆起部29-2再充气,增大压强,使圆圈型隆起部29-2胀大,从而使圆圈型隆起部29-2与蘑菇的接触面发生微小位移,破坏局部摩擦力,使蘑菇顺利掉落)。上述自适应吸盘的结构与申请公布号为cn113079954a,名称为带自适应吸盘的采摘装置及自适应吸盘的中国发明专利申请中的自适应吸盘基本相同,对于自适应吸盘本身的结构可以进一步优化,可以在柔性吸杯的圆圈型隆起部29-2的表面沿圆周方向设置多个凹坑。也可以在柔性吸杯的圆圈型隆起部29-2的表面沿圆周方向设置多个凸起来增加径向摩擦力。此外,对于自适应吸盘的结构,可以进行这样的优化,使柔性吸杯的圆圈型隆起部29-2的外侧壁厚大于内侧壁厚,这样设计的好处是,当圆圈型隆起部29-2下压菌盖而变形时,圆圈型隆起部29-2的内侧壁受力向外侧壁方向变形,圆圈型隆起部29-2的外侧壁能起到支撑作用,由于外侧壁厚大于内侧壁厚,圆圈型隆起部29-2的外侧壁的变形量很小,圆圈型隆起部整体适应性变形主要是内侧壁的变形,这样更有有利于实现和物体表面的紧密贴合。需要说明的是,为了使第一伸缩板5上下位移更佳准确,如图38和41所示,在电机支架2上安装第一光耦32、第二光耦33,在第一伸缩板5的侧面安装感应片34,当感应片34触发第二光耦33时第二光耦33发送上限信号给控制器,当感应片34触发第一光耦32时第一光耦32发送下限信号给控制器,从而准确地控制第一伸缩板5向上移动的上限位置和向下移动的下限位置。由电机支架2、丝杆电机3、升降板4、第一伸缩板5、第二伸缩板6、第一同步带轮7、第二同步带轮8、第一同步带连接板9、第一导轨10、第二导轨11、第三导轨12、第三同步带轮13、第四同步带轮14、第三伸缩板15、螺母座16、第一同步带17、第二同步带18、第二同步带连接板19、第三同步带连接板20、第四同步带连接板21等零件组成的多级伸缩装置结构紧凑,设计巧妙,在收缩状态下体积小,高度小,适合在狭小空间中应用。需要说明书的是,对于该多级伸缩装置,可以不使用第三同步带轮13、第四同步带轮14、第二同步带18、第三同步带连接板20、第四同步带连接板21、第三导轨12、第三伸缩板15,直接将第三伸缩板15固定安装在第二伸缩板6上,也就是说工作时第一伸缩板5、第二伸缩板6伸展,第二伸缩板6作为末端带动第三伸缩板15、旋转驱动电机支架22、旋转驱动电机23和自适应
吸盘上下运动(此时的第三伸缩板15并不上下运动,只起连接功能)。需要说明书的是,图37显示的多级伸缩装置是三级伸缩结构,可以进进行扩展到四级、五级或更多级伸缩结构。
88.第一臂运动驱动电机130、第2主动同步带轮131、第2从动同步带轮132、第2同步带133、同步带连接板134、第一y轴安装板137、第3导轨组件138、第一y方向运动驱动电机139、第3主动同步带轮140、第3同步带141、第3从动同步带轮142、双目相机支架143、双目相机144组成第一组采摘臂,本实用新型设置了两组采摘臂,第二组采摘臂包括第二臂运动驱动电机145、第4主动同步带轮146、第4从动同步带轮147、第4同步带148、第二y轴安装板149、第4导轨组件150、第二y方向运动驱动电机151、第5主动同步带轮152、第5同步带153、第5从动同步带轮154、双目相机支架155、双目相机156,第二臂运动驱动电机145安装在第二x轴安装板129上,第4主动同步带轮146与第二臂运动驱动电机145的输出轴连接,第4从动同步带轮147与第二x轴安装板129连接,第4同步带148连接于第4从动同步带轮147和第4主动同步带轮146之间,第二y轴安装板149的一端与第1导轨组件135的滑块连接,第二y轴安装板149的另一端与第2导轨组件136的滑块连接,第二y轴安装板149的端部通过同步带连接板第4同步带148连接,第4导轨组件150与第二y轴安装板149连接,第二y方向运动驱动电机151安装在第二y轴安装板149上,第5主动同步带轮152与第二y方向运动驱动电机151的输出轴连接,第5从动同步带轮154与第二y轴安装板149连接,第5同步带153连接于第5从动同步带轮154和第5主动同步带轮152之间,双目相机支架155与第二y轴安装板149连接,双目相机156与双目相机支架155连接。第二组采摘臂上安装第二组采摘执行器,第二组采摘执行器的安装板1与第4导轨组件150的滑块连接,安装板1通过同步带连接板与第5同步带153连接。
89.下面介绍智能采摘系统的主要工作过程:
90.如图1、2和3所示,自动换层装置300将其平台上的自动采摘机器人100提升到第二层位置,自动采摘机器人100自己运动到多层床架400的第二层中。下一步,自动采摘机器人100对多层床架400第二层上的蘑菇进行采摘作业,两组采摘臂和两组采摘执行器同时工作(大幅提高采摘效率),第一y轴安装板137在x轴方向运动带动双目相机144运动,双目相机144对其下方进行图像采集,采集的图像发送到控制器进行待采摘蘑菇的识别,然后采摘执行器动作,自适应吸盘带着蘑菇按照图25的方位从左向右平移经过高速旋转的第四刀片118,第四刀片118将蘑菇的根部切掉,根部掉落到蘑菇根存放槽105-2中,自适应吸盘泄压从而蘑菇掉落到蘑菇摆放槽105-1中,然后启动推板驱动电机108,推板106运动,第一推部106-1将蘑菇摆放槽105-1中的蘑菇推向蘑菇排料口101-1,蘑菇摆放槽105-1中的蘑菇就从蘑菇排料口101-1排出并掉落到无人值守接料装置的蘑菇存放筐227中实现收集,如图36所示,第二推部106-2将蘑菇根存放槽105-2中的根部从切根排料口101-2推出并掉落到地面上。
91.当蘑菇存放筐227中装满蘑菇,启动流转驱动电机205使流转链条206旋转,从而让另一个空的蘑菇存放筐移动到蘑菇排料口101-1位置,各个蘑菇存放筐可以流转、循环使用以适应多层床架的每一层。收集工作不受床架高度的限制。
92.当多层床架的每二层处理完毕,自动采摘机器人运动到自动换层装置300的平台上,平台上升将自动采摘机器人转移到多层床架的第三层的入口处,然后自动采摘机器人运动到第三层进行作业。
93.可见,整个过程自动化程度高、智能化程度高,作业效率高,运行可靠、稳定,降低人工成本,整个过程实现了无人作业,智能化程度高。采摘机器人结构紧凑、体积小,能够对各种空间位置的蘑菇进行采摘。
94.无人值守接料装置不限于收集蘑菇,也可以用于收集其他产品。
95.以上所述仅对本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。如果本领域的技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,采用具体实现形式,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1