一种火龙果采摘机器人
1.本实用新型涉及火龙果采摘技术领域,特别涉及一种火龙果采摘机器人。
背景技术:
2.火龙果树是典型的热带仙人掌科植物,其枝条上生长有防御性针刺, 作业人员采摘火龙果时往往需要用手将采摘剪送入到火龙果果实的根部,并且需要摆弄火龙果与植株,手工作业便暴露出在高强度的采摘过程中果农极易被针刺所伤,安全性不高;另外,这样的采摘方式操作十分不方便, 导致采摘效率低下。
3.因此人们研制开发了自动化的火龙果采摘机器,如中国专利cn 213368752u公开的一种火龙果采摘机器人包括剪断机构、第一螺纹柱和底箱,所述底箱的内部固定安装有液压缸,所述液压缸输出轴的一端穿过底箱的外部固定安装有立柱,所述立柱的上表面固定安装有横板,所述横板的一端固定安装有扶持套;通过安装有液压缸、电动推杆、剪断机构、电机和第一螺纹柱,开启液压缸将立柱抬升至合适的位置,推动该装置,使扶持套将火龙果一部分罩住,对火龙果进行扶持,开启电动推杆,电动推杆输出轴推动挤压块滑动,并对把手进行挤压,从而带动剪刀刃相互靠近,实现对火龙果根部的剪断,从而方便快捷的实现了对火龙果的采摘,采摘后的火龙果通过缓冲网掉入装盘中。
4.上述火龙果采摘机器人虽然能实现火龙果的自动采摘,但是火龙果的收集过程过于复杂,火龙果根部剪短后,要经过装盘转运到安装箱,装盘和安装箱位置的移动机构过于复杂,具体过程为:第一螺纹柱转动带动第一移动块下降,从而带动装盘和延长板下降,当第一螺纹柱转动带动第一移动块下降时,同时第二螺纹柱转动带动第二移动块向左移动,当安装箱移动到装盘的下方时,拉动定位销轴,使定位销轴脱离支撑轴内部开设的定位孔内,由于弹簧的回复力带动支撑轴上升,并将装盘顶起,从而将装盘内的火龙果掉入至安装箱;火龙果收集过程漫长,效率低,且机械结构复杂,制造成本高。
技术实现要素:
5.本实用新型提供一种火龙果采摘机器人,结构简单,能实现火龙果根部切断后的快速收集装箱,且火龙果的装箱速度可调。
6.本实用新型的技术方案如下:一种火龙果采摘机器人,包括基座、第一立柱、液压缸、横梁、剪断机构、扶持套、缓冲网和收集箱,所述第一立柱通过液压缸安装在所述基座的左部,所述横梁设置在所述第一立柱上方,所述剪断机构设置在所述横梁上,所述剪断机构下方依次连接扶持套和缓冲网,收集箱设置在所述基座的右部;
7.本实用新型还包括输送板、第二立柱、第一电动推杆和滑块,所述输送板一端设置在所述缓冲网下方且另一端设置在所述收集箱上方,所述输送板以左边高右边低倾斜设置,所述第二立柱一端固定设置在所述基座上且另一端和所述输送板铰接,所述第一电动推杆一端固定设置在所述基座上且另一端和所述滑块铰接,所述滑块设置在所述输送板下方的导轨上,所述导轨的长度方向和所述输送板长度方向一致。本实用新型采用简单的结
构,采用倾斜设置的一块输送板,将切断后的火龙果经过缓冲网后,从输送板滚落到收集箱中,实现火龙果的装箱,如果火龙果滚落不下来或者速度过快可能损坏果皮时,可通过第一电动推杆实现输送板的倾斜度可调,把火龙果运动速度调整到合理位置,如果速度太快则第一电动推杆伸长,如果火龙果滚不下来则第一电动推杆缩短,该结构使的火龙果装箱的适用性更强。
8.优选的,所述剪断机构包括第二电动推杆、延长杆和动刀片,所述第二电动推杆设置在所述横梁上,所述第二电动推杆后方依次连接所述延长杆和动刀片,所述延长杆和所述动刀片延伸至所述扶持套内部。本实用新型采用电动推杆带动刀片实现火龙果的根部剪短,相比传统的剪刀结构更加简单,剪切力更强,可实现动刀片的简易控制。
9.本实用新型中,延长杆设置为圆杆结构,穿设在所述扶持套的通孔上,扶持套也起到稳定动刀片的作用,切断效果更好。
10.本实用新型中,缓冲网为柔性网兜,即使输送板角度倾斜,缓冲网仍可较好的贴合输送板,对火龙果起到很好的缓冲作用。
11.本实用新型中,所述扶持套的轴向竖向设置,相比横向设置,能更好的使火龙果进入扶持套,扶持效果更好。
12.优选的,本实用新型还包括定刀片,所述定刀片设置在所述在所述扶持套右部的内壁上和且所述动刀片相对设置。采用两把刀刃,配合简单火龙果根部,效率更高,提高了剪断率。
13.本实用新型中,所述第二立柱设置在所述第一电动推杆的左边。
14.本实用新型的有益效果是:
15.1、本实用新型采用简单的结构,采用倾斜设置的一块输送板,将切断后的火龙果经过缓冲网后,从输送板滚落到收集箱中,实现火龙果的装箱,如果火龙果滚落不下来或者速度过快可能损坏果皮时,可通过第一电动推杆实现输送板的倾斜度可调,把火龙果运动速度调整到合理位置,如果速度太快则第一电动推杆伸长,如果火龙果滚不下来则第一电动推杆缩短,该结构使的火龙果装箱的适用性更强。
16.2、本实用新型采用电动推杆带动刀片实现火龙果的根部剪短,相比传统的剪刀结构更加简单,剪切力更强,可实现动刀片的简易控制。
附图说明
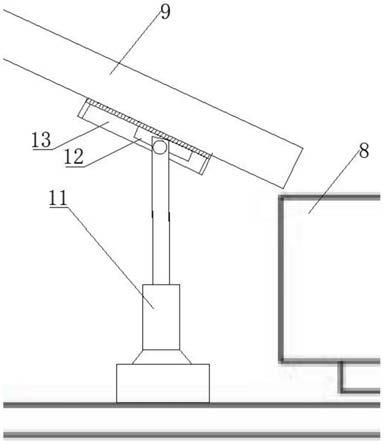
17.图1是本实用新型所述的一种火龙果采摘机器人整体结构示意图。
18.图2是本实用新型所述的滑块和导轨的结构示意图。
19.图3是本实用新型所述的剪断机构的结构示意图。
20.图中:1-基座、2-第一立柱、3-液压缸、4-横梁、5-剪断机构、501
‑ꢀ
第二电动推杆、502-延长杆、503-动刀片、504-定刀片、6-扶持套、7-缓冲网、8-收集箱、9-输送板、10-第二立柱、11-第一电动推杆、12-滑块、 13-导轨。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型做进一步说明,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
22.在本实用新型的描述中,需要理解的是,术语“左”、“右”、“上”,“下”,“前”,“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或结构必须具有的特定方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.实施例1:
24.如图1所示,一种火龙果采摘机器人,包括基座1、第一立柱2、液压缸3、横梁4、剪断机构5、扶持套6、缓冲网7和收集箱8,所述第一立柱2通过液压缸3安装在所述基座1的左部,所述横梁4设置在所述第一立柱2上方,所述剪断机构5设置在所述横梁4上,所述剪断机构5下方依次连接扶持套6和缓冲网7,收集箱8设置在所述基座1的右部;如图2所示,还包括输送板9、第二立柱10、第一电动推杆11和滑块12,所述输送板9一端设置在所述缓冲网7下方且另一端设置在所述收集箱8 上方,所述输送板9以左边高右边低倾斜设置,所述第二立柱10一端固定设置在所述基座1上且另一端和所述输送板9铰接,所述第一电动推杆 11一端固定设置在所述基座1上且另一端和所述滑块12铰接,所述滑块 12设置在所述输送板9下方的导轨13上,所述导轨13的长度方向和所述输送板9长度方向一致。
25.本实用新型的工作过程如下:机器人在视觉系统的识别下,基座1在驱动轮带动下到达预设位置,液压缸3伸缩调整好位置,使火龙果进入到扶持套6,然后第二电动推杆501推动延长杆502和动刀片503对火龙果进行根部切断,火龙果进入到缓冲网7后,进入到输送板9,最后滚落到收集箱8中,工人再将收集箱8拿下即可实现对火龙果的储存。
26.若要调整火龙果在输送板9上的速度,则可调整第一电动推杆11,调整输送板9倾斜角,进而调节火龙果运输速度。
27.实施例2:
28.如图1所示,一种火龙果采摘机器人,包括基座1、第一立柱2、液压缸3、横梁4、剪断机构5、扶持套6、缓冲网7和收集箱8,所述第一立柱2通过液压缸3安装在所述基座1的左部,所述横梁4设置在所述第一立柱2上方,所述剪断机构5设置在所述横梁4上,所述剪断机构5下方依次连接扶持套6和缓冲网7,收集箱8设置在所述基座1的右部;
29.如图2所示,本实施例还包括输送板9、第二立柱10、第一电动推杆 11和滑块12,所述输送板9一端设置在所述缓冲网7下方且另一端设置在所述收集箱8上方,所述输送板9以左边高右边低倾斜设置,所述第二立柱10一端固定设置在所述基座1上且另一端和所述输送板9铰接,所述第一电动推杆11一端固定设置在所述基座1上且另一端和所述滑块12 铰接,所述滑块12设置在所述输送板9下方的导轨13上,所述导轨13 的长度方向和所述输送板9长度方向一致。本实用新型采用简单的结构,采用倾斜设置的一块输送板9,将切断后的火龙果经过缓冲网7后,从输送板9滚落到收集箱8中,实现火龙果的装箱,如果火龙果滚落不下来或者速度过快可能损坏果皮时,可通过第一电动推杆11实现输送板9的倾斜度可调,把火龙果运动速度调整到合理位置,如果速度太快则第一电动推杆11伸长,如果火龙果滚不下来则第一电动推杆11缩短,该结构使的火龙果装箱的适用性更强。
30.如图3所示,本实施例中,所述剪断机构5包括第二电动推杆501、延长杆502和动刀片503,所述第二电动推杆501设置在所述横梁4上,所述第二电动推杆501后方依次连接所述延长杆502和动刀片503,所述延长杆502和所述动刀片503延伸至所述扶持套6内部。本实用新型采用电动推杆带动刀片503实现火龙果的根部剪短,相比传统的剪刀结构更加简单,
剪切力更强,可实现动刀片503的简易控制。
31.如图3所示,本实施例中,延长杆502设置为圆杆结构,穿设在所述扶持套6的通孔上,扶持套6也起到稳定动刀片503的作用,切断效果更好。
32.如图3所示,本实施例中,缓冲网7为柔性网兜,即使输送板9角度倾斜,缓冲网7仍可较好的贴合输送板9,对火龙果起到很好的缓冲作用。
33.本实施例中,所述扶持套6的轴向竖向设置,相比横向设置,能更好的使火龙果进入扶持套6,扶持效果更好。
34.如图3所示,本实施例中,本实用新型还包括定刀片504,所述定刀片504设置在所述在所述扶持套6右部的内壁上和且所述动刀片503相对设置。采用两把刀刃,配合简单火龙果根部,效率更高,提高了剪断率。
35.本实施例中,所述第二立柱10设置在所述第一电动推杆11的左边。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1