一种进退刀装置及其自动割胶机的制作方法
1.本实用新型涉及割胶装置,尤其是涉及一种进退刀装置及其自动割胶机。
背景技术:
2.在橡胶树的橡胶采集中,每隔几天在橡胶树皮的割胶口重复切割斜向产生新刀口,使橡胶液从口子中流出,橡胶液顺着斜向刀口流入胶瓶中。传统的通过人工割胶方式,采用手持割胶刀或电动割胶刀切割树皮操作,耗费人力物力,效率低。为增加橡胶采集的效率,现有技术的割胶机采用机械化操作,提升割胶的效率,降低人工的劳动强度。现有技术中,采用一种在一段时间固定在橡胶树上的自动割胶机,该割胶机采用上下弧形的导轨、导轨之间作环向运动的运动架和通过丝杆连动的刀片架和刀片,通过采用固定运动角度的刀片模拟人工削切方式,通过驱动使得刀片沿橡胶树表面设计的切割斜向进行往复削切,每次削切时将割胶口的旧口往下削切约1.5毫米厚的树皮,使割胶口产生新的割胶口。该自动割胶机提升割胶的效率,降低人工的劳动强度。但其还存在如下的技术问题:
3.(1)采用固定运动角度的刀片,硬削切方式在割胶过程中,依靠刀刃对环橡胶切割斜向的树皮削切,其刀刃容易损坏和受凹凸不平的橡胶树皮的影响,而难于保证削切厚度和深度,造成割伤橡胶树体等。
4.(2)仅依靠沿导轨环形运动的运动架和通过丝杆竖直运动的刀片架结合的二维运动结构。其采用固定电机连接运动架在导轨运动和连接刀片架竖直运动结构,难于精确保证刀片的切割角度和进刀量保持不变,使得刀片在割入橡胶树的树皮内时被树干夹紧,影响进一步的切割割胶作业,甚至在操作中容易使刀片折断。
5.(3)固定的进退刀刀架结构,无法微调刀片的进结量和角度。刀片没有精确的进结量限定结构,不能保证在不同树径时精确调整割伤和深度。同时造成上述(1)(2)的刀片等损坏和割伤橡胶树体等技术问题。
6.(4)旧割胶口凝结的橡胶无法回收,在再交削切时该树皮和胶线会沾挂在刀片、刀架或机身上,造成刀片、刀架或机身的损坏,同时造成胶线的浪费和污染环境。
技术实现要素:
7.本实用新型的目的旨在提供一种进退刀装置及其自动割胶机,采用丝杆与连杆同步动作,调节割刀进退刀的同时,调节割刀的割刀高度,与上一道切割刀口一定的间距,实现进退刀与割胶位置的同步调节。
8.为解决上述技术问题,本实用新型提供的技术方案是:一种进退刀装置,包括升降模块和可运动设于升降模块上的割刀模组,割刀模组包括可升降和摆动的调刀支架,调刀支架上设有割刀,升降模块中设有调节丝杆、调节连杆和调节电机,调节丝杆与调刀支架螺纹连接,调节连杆与调刀支架滑动连接,调节电机控制调节丝杆和调节连杆同步转动、带动调刀支架控制割刀的进刀和退刀。
9.本实用新型采用上述技术方案,调节电机可通过齿轮连接方式或同步带传动的方
式,控制调节丝杆和调节连杆的转动,调刀支架螺接于调节丝杆上沿调节丝杆的轴向进行升降运动,进行竖直方向的微调,调刀支架滑动套设在调节连杆上,调刀支架可实现在调节丝杆的驱动下进行轴向上的升降运动,实现竖直方向的微调;升降模块用于整体控制割刀模组的升降位置,通过调节丝杆控制调刀支架和割刀的切割高度位置,通过调节连杆在转动中使得调刀支架摆动,控制割刀的进刀和退刀。
10.进一步地,割刀为电动机构连接的电动旋转割刀,电动机构包括割胶电机和与割胶电机连接的旋转刀盘,割胶电机定位在调刀支架上,割刀为旋转割刀固定在旋转刀盘上。调刀支架的升降运动配合运动架的圆周运动,使得割刀切割树干上的刀口斜向在树干上,利于胶液的流出及向下流动收集在胶杯中,调刀支架转动时控制旋转刀盘及旋转割刀的进刀和退刀。通过调刀支架调节电动机构连接的旋转刀盘上的旋转割刀的进刀切割和退刀高度和角度,调刀支架的升降运动配合运动架的圆周和竖直运动构成的斜向运动。割胶电机带动旋转刀盘和旋转割刀高速运转,高速旋转的旋转割刀精确对设计的切割位实现精确快速切割形成斜向刀口。调刀支架转动时控制旋转刀盘及旋转割刀的进刀和退刀。其中,旋转割刀包括至少两个,沿着旋转刀盘的相对设置,旋转刀盘由割胶电机的驱动做旋转运动,带动旋转割刀进行旋转切割。
11.进一步地,调刀支架包括底座凸轮套和连接块,底座与调节丝杆螺接、底座与调节连杆滑动连接,凸轮套和连接块可转动在底座上,连接块的一端与凸轮套的端部相抵接、另一端与割胶电机连接,在连接块与底座之间设有压簧,调节连杆上活动套设有凸轮,凸轮套中设有凸轮孔,调节连杆控制凸轮转动定位在凸轮孔中、通过凸轮套拨动连接块转动、控制旋转割刀的摆动。调节连杆转动时,带动凸轮转动,凸轮接触且推压凸轮套的凸轮孔的内壁,使得凸轮套在底座上转动,在转动中其端部抵接连接块使得连接块转动,连接块带动与其连接的割胶电机摆动,实现旋转割刀的进退刀,压簧受挤压时提供弹力维持平衡,保持在进刀时,旋转割胶的位置稳定。
12.进一步地,割刀模组还包括呈弧形的定位环,通过定位环限定割刀刀口的进刀量。通过定位环实现与树表圆周自适应定位,其中弧形的定位环的弧度和旋转割刀刀口的旋转半径相适应,通过定位环的弧形外环边来限定旋转割刀的伸出量,即对切入树体表面的进刀量或进刀深度。在进刀时,定位环的弧形外环边始终保持与树体表面相切定位,保证了进刀角度和进刀深度,旋转割刀伸出在定位环外侧的长度为旋转割刀对树干的切割深度,通过定位环伸出尺寸和角度的调整,可实现调整旋转割刀的进刀量,并可应对不同树体表面不同情况、不同树径的作出自适应性的调节,包括应对树体表面的凹、凸树榴节,非圆形树体等情况,均能精确切割出的树表顺滑的斜向刀口,切割精确,防止损伤树体的目的。
13.进一步地,割胶电机上设有调节盘,定位环定位在调节盘上、调节其定位角度和刀口的进刀量。实际使用中,调节盘可在割胶电机上进行调整,调整其安装于割胶电机上的转动位置,以调整定位环定位外移与树干表面的接触部位,在动态运动过程中,保持定位环的该接触部位的点一直与树干表面接触,保持旋转割刀对于树干表面的切割深度,使得形成的刀口均匀平整。通过调节调节盘的角度,实现调节盘上定位环与树体表面的相切定位点,使定位环的弧形外环边始终保持与树体表面相切定位,保证了进刀角度和进刀深度,旋转割刀伸出在定位环外侧的长度为旋转割刀对树干的切割深度,通过定位环伸出尺寸和角度的调整,可实现调整旋转割刀的进刀量,并可应对不同树体表面的不同情况、不同树径作出
自适应性的调节,包括你应对树体表面的凹、凸树榴节,非圆形树体等情况,均能够精确切割出树表顺滑的斜向刀口,切割精确,防止损伤树体。
14.进一步地,调节盘上设有定位槽,在定位槽中设有可调的定位齿轮,定位环设有条形齿固定端,条形齿固定端插入定位槽中与定位齿轮啮合连接。条形齿固定端与定位齿轮啮合,定位齿轮将条形齿固定端固定,定位环的相切定位点的离心半径,即对应定位旋转割刀的切割外端的伸出量(伸出尺寸或进给量或切割厚度);需要调节时,转动定位齿轮,通过齿轮传动调节条形齿固定端与定位齿轮的啮合位置,进而调节定位环的伸出尺寸,在实际割胶过程中,定位环保持接触抵接在树干表面保持相切,定位环的伸出尺寸的调节,起到调节旋转割刀伸出于定位环外的尺寸,进而实现调整旋转割刀的进刀量。
15.为解决上述技术问题,本实用新型还提供的另一技术方案是:一种自动割胶机,包括上述技术方案中任一项所述的进退刀装置。
16.进一步地,包括上下相对的弧形导轨和可运动设在弧形导轨之间的运动架,升降模块设于运动架上。将上下相对的弧形导轨固定在橡胶树树干上,运动架设在弧形导轨之间,运动架沿上下相对的弧形导轨作环向的上下同步运动,运动架上的升降模块作竖直运动,实现环向运动和竖直运动相配合的精确切割斜面运动的切割角度。环向运动和竖直运动相配合的构成环树的斜向运动,实现可运动的割刀模组实现精确调整进刀高度、退刀和进刀的目的。作业时电动机构驱动旋转割刀进行旋转,其中割刀模组可运动以调节调整进刀高度、退刀和进刀,运动架沿着弧形导轨外周进行运动,配合升降模块作竖直运动和割刀模组的运动,旋转割刀高速自转实现旋转切割,复合运动一起调整旋转割刀对橡胶树的表面进行切割,在切割过程中旋转割刀对橡胶树的表面做圆周运动的同时进行上下升降运动,在橡胶树上切割出斜向刀口,胶液可从刀口中向下流,流入胶杯中,旋转割刀在切割过程中通过高速旋转切割,旋转割刀对树皮表面切割效果好,且不会被卡死和损坏。精确保障刀片的切割角度和进刀量保持不变实现削切厚度和深度,防止造成割伤橡胶树体的技术效果。
17.进一步地,升降模块包括升降座、设于升降座两端的上模座和下模座,上模座和下模座之间设置调节丝杆和调节连杆,上模座上设有驱动升降座升降运动的驱动电机。
18.进一步地,运动架包括直线导轨和连动杆,直线导轨通过行走齿轮行走在弧形导轨上,驱动电机通过控制齿轮驱动连动杆转动,连动杆通过其丝杆段控制下模座螺纹跟进带动升降座升降运动。驱动电机工作时,驱动行走齿轮转动,行走齿轮沿着弧形导轨的外环齿咬合跟进,使得行走座带动运动架行走在弧形导轨上。
19.本实用新型还取得的有益效果是:通过调节电机的驱动,调节连杆带动割刀模组转动,进而控制电动机构和割刀朝割刀的进给方向转动,控制割刀进刀,当调节连杆转动一圈,其上设置的凸轮脱离拨动凸轮套,通过扭簧复位,实现割刀退刀。
20.采用割刀旋转切割的方式,割刀进行切割时不会夹紧在橡胶树干上,保证切割质量且割胶速率提高,通过定位环的伸缩定位,保证割刀的切割的平面与被切割部位的树干保持同一平面,其中定位环与树干的表面在动态运动中保持同一个位置与其接触,使得割刀的进刀量维持在稳定的状态;驱动电机实现升降与圆周运动同步,割胶电机控制割刀的割胶的运动轨迹对于橡胶树干的刀口呈环绕状,胶液沿刀口的边缘往下流出至胶杯中进行收集。在进行下一道割胶时,割胶电机通过调节电机控制回原点,且进行角度和竖直方向的
微调,使用更加灵活;在进行切割时上一道的刀口上残留的凝固的胶线可缠绕在收胶柱上,进行收集利用,避免浪费。
附图说明
21.图1是本实用新型进退刀装置的仰视结构示意图;
22.图2是图1中本实用新型进退刀装置的下模座的内部结构仰视图;
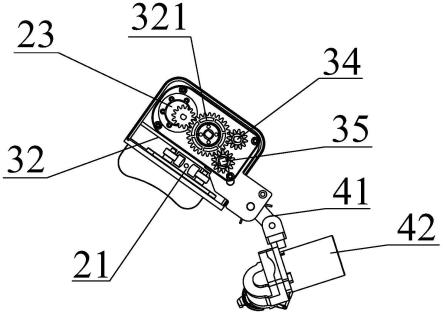
23.图3是本实用新型进退刀装置的割刀模组的结构示意图;
24.图4是本实用新型进退刀装置的割刀模组另一角度的结构示意图;
25.图5是本实用新型自动割胶机的立体结构示意图;
26.图6是本实用新型自动割胶机升降模块设于运动架上的结构示意图;
27.图7是本实用新型自动割胶机的另一角度的立体结构示意图;
28.图8是本实用新型的调节盘的结构示意图;
29.图9是本实用新型的行走座的结构示意图;
30.图10是本实用新型自动割胶机的俯视结构示意图;
31.图11是本实用新型自动割胶机的仰视结构示意图;
32.图12是本实用新型自动割胶机的弧形导轨的结构示意图;
33.图13是本实用新型自动割胶机的弧形导轨安装于行走座的结构示意图;
34.图14是本实用新型弧形导轨的截面结构剖面图;
35.图15是本实用新型的局部结构俯视图;
36.图16是本实用新型的仰视角度的内部结构仰视图。
37.附图标记说明:1a弧形导轨,11外环齿,12内环齿,13环形通道,14锁紧连接件,15滑动面,2a运动架,20限位柱,21直线导轨,211行走齿轮,22连动杆,222直杆段,221丝杆段,23驱动电机,24行走座,3a升降模块,31升降座,32上模座,321控制齿轮,33下模座,34调节丝杆,35调节连杆,36调节电机,37调节齿轮,4a割刀模组,4b电动机构,41调刀支架,411底座,412凸轮套,413连接块,414凸轮,415凸轮孔,416压簧,42割胶电机,421调节盘,422定位环,423定位槽,424定位齿轮,425条形齿固定端,43旋转刀盘,44割刀,45收胶柱。
具体实施方式
38.下面结合附图和具体实施方式对本实用新型作进一步的说明。
39.参照图1至图14所示,一种进退刀装置,包括升降模块3a和可运动设于升降模块3a上的割刀模组4a,割刀模组4a包括可升降和摆动的调刀支架41,调刀支架41上设有割刀44,升降模块3a中设有调节丝杆34、调节连杆35和调节电机36,调节丝杆34与调刀支架41螺纹连接,调节连杆35与调刀支架41滑动连接,调节电机36控制调节丝杆34和调节连杆35同步转动、带动调刀支架41控制割刀44的进刀和退刀。
40.割刀44为电动机构4b连接的电动旋转割刀,电动机构4b包括割胶电机42和与割胶电机42连接的旋转刀盘43,割胶电机42定位在调刀支架41上,割刀44为旋转割刀固定在旋转刀盘43上。
41.调刀支架41包括底座411凸轮套412和连接块413,底座411与调节丝杆34螺接、底座411与调节连杆35滑动连接,凸轮套412和连接块413可转动在底座411上,连接块413的一
端与凸轮套412的端部相抵接、另一端与割胶电机42连接,在连接块413与底座411之间设有压簧416,调节连杆35上活动套设有凸轮414,凸轮套412中设有凸轮孔415,调节连杆35控制凸轮414转动定位在凸轮孔415中、通过凸轮套412拨动连接块413转动、控制旋转割刀44的摆动。
42.割刀模组4a还包括呈弧形的定位环422,通过定位环422限定割刀44刀口的进刀量。
43.割胶电机42上设有调节盘421,定位环422定位在调节盘421上、调节其定位角度和刀口的进刀量。
44.调节盘421上设有定位槽423,在定位槽423中设有可调的定位齿轮424,定位环422设有条形齿固定端425,条形齿固定端425插入定位槽423中与定位齿轮424啮合连接。
45.本实施方式中,本实施方式中,调节电机36工作,驱动调节齿轮37齿轮啮合传动至调节丝杆34和调节连杆35,控制调节丝杆34和调节连杆35旋转,调节丝杆34转动调节控制底座411的升降位置,在实际使用中可采用微量调节;调节连杆35转动带动凸轮414旋转,凸轮414的外侧推压凸轮孔415的内壁,带动凸轮套412旋转在底座411上,在转动中凸轮套412抵接且拨动连接块413的端部,转动连接块413,连接块413带动割胶电机42摆动,定位旋转割刀44的进刀与退刀,在工作中进刀切割,停止工作时退刀复位。
46.在调节电机36实际控制过程中,调节连杆35旋转一周,凸轮414转动一周,凸轮414回复原位时未推压凸轮套412的凸轮孔415的内壁,通过压簧416的作用,使得连接块413及凸轮套412复位,连接块413带动割胶电机42复位,使得割刀44退刀。与此同时,调节丝杆34同步旋转一周,通过螺纹连接控制底座411下降或上升一圈螺纹的高度,控制割刀44沿上一道刀口的下侧或上侧一个同样的距离进行切割,切割的刀口均匀。
47.继续参照图1至图16所述,一种自动割胶机,包括上述具体实施方式所述的进退刀装置。包括上下相对的弧形导轨1a和可运动设在弧形导轨1a之间的运动架2a,升降模块3a设于运动架2a上。
48.升降模块3a包括升降座31、设于升降座31两端的上模座32和下模座33,上模座32和下模座33之间设置调节丝杆34和调节连杆35,上模座34上设有驱动升降座31升降运动的驱动电机23。
49.运动架2a包括直线导轨21和连动杆22,直线导轨21通过行走齿轮211行走在弧形导轨1a上,驱动电机23通过控制齿轮321驱动连动杆22转动,连动杆22通过其丝杆段221控制下模座33螺纹跟进带动升降座31升降运动。
50.本实用新型在具体实施过程中,使用时,弧形导轨1a上下抱紧在橡胶树的树干上,运动架2a可通过齿轮啮合传动的方式沿弧形导轨1a的外弧壁做圆周运动。升降模块3a沿运动架2a做直线升降运动,带动割刀模组4a完成圆周与直线的复合运动,使得割刀模组4a沿着橡胶树的树干上由上而下运动割胶。在割胶过程中,电动机构4b驱动旋转割刀44旋转,旋转割刀44控制旋转割刀44切割进树皮内,使得橡胶树的树干上形成一个斜向的刀口,该刀口由旋转割刀44跟随升降模块3a及运动架2a的同步运动形成。在切割作业中,通过电动机构4b驱动旋转割刀44进行转动切割,将树干的树皮完整切割,保障割胶效果。本自动割胶机还通过收胶柱45可用于收卷残留在上一道刀口上经凝固的胶线,收胶柱45延伸处旋转割刀44的外侧,边切割边收卷,充分利用资源,避免浪费。
51.在本实施方式中,弧形导轨1a本体的外弧壁布设有外环齿11、内弧壁布设有内环齿12,弧形导轨1a设有锁紧连接件14。
52.沿弧形导轨1a中设有环形通道13,锁紧连接件14为箍带、其穿插在环形通道13中。
53.本实施方式中,弧形导轨1a可变形,更加方便的环抱在树干上,其中通过锁紧连接件14加以锁紧固定,使得运动架2a可稳定的运动在上、下弧形导轨1a之间。外环齿11与内环齿12为齿纹结构,分布在弧形导轨1a的外壁和内壁,用于与运动架2a齿纹啮合传动连接。弧形导轨1a可变形,在割胶完毕拆卸时,可撑开弧形导轨1a、使其从树干上取出。
54.在本实施方式中,运动架2a包括直线导轨21、连动杆22、驱动电机23和设于直线导轨21两端的行走座24,连动杆22的两端通过行走齿轮211与弧形导轨1a的外环齿11啮合连接,驱动电机23设于行走座24上并与行走齿轮211连接驱动运动架2a行走在弧形导轨1a上。
55.弧形导轨1a的内弧壁位于内环齿12的两侧形成有滑动面15,行走座24上设有限位柱20,行走座24通过限位柱20与行走齿轮211配合、可运动于滑动面15上。
56.运动架2a的运动方式为,启动驱动电机23,驱动电机23通过齿轮啮合连接的方式驱动行走齿轮211转动,在行走齿轮211转动过程中,行走齿轮211沿着弧形导轨1a的外环齿11上进行移动,进一步的,通过限位柱20滚动在弧形导轨1a的滑动面15上,可使得行走座24稳定的运动在弧形导轨1a的外环齿11上。
57.驱动电机23设于行走座24上时,其通过齿轮结构的方式直接与行走齿轮211啮合连接,驱动行走齿轮211转动、在转动中行走齿轮211行走在外环齿11上,以带动行走座24运动于弧形导轨1a上。当驱动电机23设于升降模块3a上时,驱动电机23通过驱动连动杆22转动的方式可通过齿轮啮合,将控制齿轮321套设于连动杆22上,驱动电机23与控制齿轮321啮合传动连接以实现驱动连动杆22的旋转。还可通过在连动杆22上套设同步轮,驱动电机23与同步轮间通过同步带传动连接,通过同步带传动带动同步轮旋转,控制连动杆22的旋转。
58.升降模块3a包括升降座31、设于升降座31上的上模座32,连动杆22具有直杆段222和丝杆段221,上模座32中设有控制齿轮321可滑动套接在直杆段222上,丝杆段221与升降座31底部螺接,驱动电机23设于上模座32上与控制齿轮321连接。
59.升降座31的另一端设有用于调节割刀44的切割角度的下模座33,该下模座33与连动杆22的丝杆段221螺纹连接。
60.本实施方式中,驱动电机23驱动控制齿轮321转动,控制连动杆22旋转,通过连动杆22上的丝杆段221,带动升降座31沿连动杆22的轴向即在实际割胶时的竖直方向运动,进而实现带动割刀模组4a的升降运动,配合运动架2a的行走座24的圆周运动,实现运动的复合,使割刀模组4a沿着树干上斜向割胶。
61.本自动割胶机在割胶中,驱动电机23启动,带动控制齿轮321旋转,在旋转时带动连动杆22旋转,通过丝杆段221与下模座33底部螺接,驱动升降座31螺纹跟进在丝杆段221上,上模座32滑动套设在直杆段222上,与下模座33相配合升降模块3a在连动杆22上的直线升降运动;同时,由于连动杆22的旋转,带动其两端的行走齿轮211齿轮啮合行走在弧形导轨1a的外环齿11上,实现运动架2a的弧形圆环运动。
62.割刀模组4a通过割胶电机42驱动,带动旋转刀盘43旋转,旋转割刀44设于旋转刀盘43上跟随其旋转,通过调刀支架41运动在调节连杆35和调节丝杆34上,进行旋转割刀44
的上下切割高度的调节以及实现进刀和退刀,调节丝杆34与调节连杆35通过调节电机36同步旋转,在进刀与退刀动作时,实现上下高度的调整。具体地,调刀支架41通过底座411螺接于调节丝杆34上、滑动套接于调节连杆35上,调节连杆35上设置凸轮414,凸轮414在转动中定位于凸轮套412中,凸轮414转动时接触并推压凸轮孔415的内壁面,从而使得凸轮套412转动在底座411上。凸轮套412转动时其端部拨动连接块413,连接块413同样的转动在底座411上,连接块413的另一端带动与其连接的割胶电机42进行摆动,实现进刀与退刀。
63.综上所述,本实用新型已如说明书及图示内容,制成实际样品且经多次使用测试,从使用测试的效果看,可证明本实用新型能达到其所预期之目的,实用性价值乃无庸置疑。以上所举实施例仅用来方便举例说明本实用新型,并非对本实用新型作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本实用新型所提技术特征的范围内,利用本实用新型所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本实用新型的技术特征内容,均仍属于本实用新型技术特征的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1