用于控制有害动物的方法和设备与流程
本公开总体涉及控制有害动物种群,具体涉及用于在不使用有毒物质的情况下终止和遏制啮齿动物的方法和设备。
背景技术:
1、诸如大鼠和小鼠以及其它动物的啮齿动物是许多地方常见的有害动物。控制有害动物的传统尝试通常分为诱捕或毒杀它们。这种传统方法不令人满意。特别地,已经发现使用毒药有毒杀或灭杀其它物种的风险,这些物种也可能吃掉有毒诱饵或被毒药灭杀后的死亡动物的躯体。
2、此外,传统的诱捕器也不令人满意。特别地,常见样式的啮齿动物诱捕器利用由捕捉件释放的弹簧加载臂,该弹簧加载臂旨在捕捉并通常灭杀动物。这种诱捕器的一个缺点是其在被要求由用户检查和复位之前仅可以使用一次。
3、申请人意识到尝试通过提供一种利用定位于腔室中的触发杆的自动啮齿动物诱捕器来纠正上述缺陷,啮齿动物被诱饵吸引到该腔室中。触发杆在被啮齿动物旋转时释放阀,从而释放弹簧加载的灭杀机构,该灭杀机构可操作为撞击和灭杀腔室中的啮齿动物。这种装置的示例可以在bond等人的美国专利申请公报第2017/0202206号中找到。不利地,这种装置依赖于触发杆的移动,该移动可能由于装置的移动或其它物体的存在而易于产生错误的结果。此外,这种装置允许啮齿动物的躯体落在装置下方的地面上,这是为了捕食者将它们去除并吃掉。然而,这种躯体的去除妨碍了为了研究这种装置的功效而进行的躯体收集。
技术实现思路
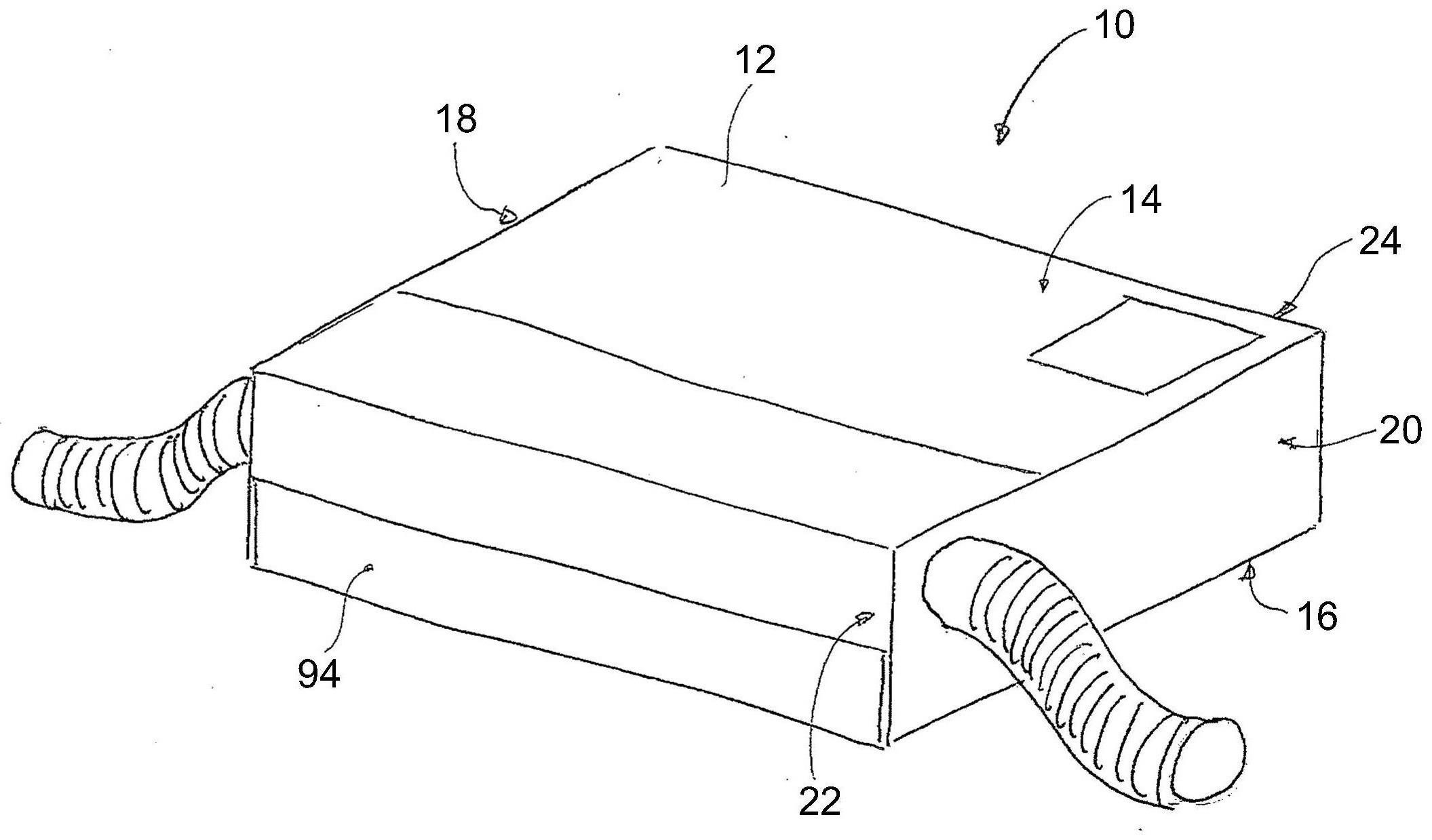
1、根据第一实施方式,公开了一种用于控制有害动物的设备,包括:壳体,该壳体具有从入口延伸到壳体中的通道;撞击构件,该撞击构件可移动穿过通道;以及平面传感器,该平面传感器沿着通道朝向入口与灭杀杆隔开预定距离,该平面传感器被配置为感测横穿穿过通道的感测平面的有害动物的存在,其中,当平面传感器指示存在穿过感测平面的有害动物时,撞击构件可操作为被释放以快速移动穿过通道。
2、平面传感器可以从由红外、超声和激光构成的组中选择。平面传感器可以被限制在感测平面。平面传感器可以包括在其上的透镜,该透镜除了通过限定感测平面的狭槽之外基本上阻挡感测。平面传感器可以包括发送器和接收器。设备还可以包括控制器,该控制器可操作为使撞击构件移动穿过通道,从而在从平面传感器接收到信号时撞击有害动物。
3、通道可以形成有底板和围绕通道延伸的至少一个壁。底板从水平位置可旋转至下降的竖直位置。在撞击构件撞击有害动物之后,可以使底板旋转到下降的竖直位置。底板可以由捕捉件释放,以下降到竖直位置。设备还可以包括适于将底板复位到水平位置的复位提升器。设备还可以包括位于底板下方的收集箱,其中,有害动物尸体通过底板沉积到收集箱中。
4、设备还可以包括沿着通道与撞击构件的相对侧隔开的两个平面传感器。撞击构件可以被构造为当两个平面传感器都指示在其感测平面处存在有害动物时撞击该有害动物。两个平面传感器可以与撞击构件隔开相等距离。两个平面传感器可以与撞击构件隔开一定距离,该距离与从目标有害动物的鼻子到颈部的距离相对应。
5、撞击构件可以包括基本上竖直延伸的杆。撞击构件在通道的相对侧的第一位置与第二位置之间可移动。设备还可以包括用于使撞击构件沿着动物击打路径在第一位置与第二位置之间移动的驱动机构。
6、驱动机构可以包括弹簧。设备还可以包括适于将撞击构件移动到第一位置的复位马达。
7、动物击打路径可以是线性的。动物击打路径可以是弧形的。动物击打路径可以是基本上水平的。动物击打路径可以是基本上竖直的。
8、设备还可以包括与第一位置相对的不可移动表面,其中,第二位置朝向不可移动表面。路径可以包括基本上透明的壁。设备还可以包括可操作为将诱饵排放到通道中的诱饵分配器。
9、根据第一实施方式,公开了一种用于控制有害动物的方法,包括:提供具有从入口延伸到其中的通道的壳体;利用第一平面传感器感测在延伸穿过通道的感测平面处的有害动物的存在;以及响应于第一平面传感器检测到在感测平面处存在有害动物,使撞击构件快速移动穿过通道,其中,撞击构件位于距离感测平面朝向入口一定距离处,该距离被选择为对应于有害动物的鼻子与颈部之间的距离。
10、该方法还可以包括:提供与撞击构件隔开与第一平面传感器相同距离的第二平面传感器。该方法还可以包括:提供通向通道的各个端的第二入口。
11、根据另外的实施方式,公开了一种用于控制有害动物的设备,包括:壳体,该壳体具有通入其中的通道,通道具有底板构件;以及动物灭杀机构,该动物灭杀机构位于所述路径内,路径具有可旋转的底板,该可旋转的底板可操作为在灭杀机构灭杀有害动物之后向下旋转。
12、设备还可以包括位于底板下方的收集箱。壳体可以在地面上方隔开,以将灭杀的有害动物沉积在其下方。
13、动物灭杀机构可以位于底板内。动物灭杀机构可以包括可操作为向其上的动物输送致命电荷的带电板。
14、动物灭杀机构可以包括适于向通道内的有害动物输送灭杀打击的撞击器。设备还可以包括传感器,该传感器适于检测在通道内的期望位置处的目标有害动物的存在,以触发动物灭杀机构。
15、在结合附图审阅以下对具体实施方式的描述后,本公开的其他方面和特征对于本领域普通技术人员将变得显而易见。
技术特征:
1.一种用于控制有害动物的设备,包括:
2.根据权利要求1所述的设备,其中,所述平面传感器从由红外、超声和激光构成的组中选择。
3.根据权利要求1所述的设备,其中,所述平面传感器被限制在所述感测平面。
4.根据权利要求3所述的设备,其中,所述平面传感器包括在其上的透镜,所述透镜除了通过限定所述感测平面的狭槽之外基本上阻挡感测。
5.根据权利要求1所述的设备,其中,所述平面传感器包括发送器和接收器。
6.根据权利要求1所述的设备,还包括控制器,所述控制器可操作为使所述撞击构件移动穿过所述通道,从而在从所述平面传感器接收到信号时撞击所述有害动物。
7.根据权利要求1所述的设备,其中,所述通道形成有底板和围绕所述通道延伸的至少一个壁。
8.根据权利要求7所述的设备,其中,所述底板从水平位置可旋转至下降的竖直位置。
9.根据权利要求8所述的设备,其中,在所述撞击构件撞击所述有害动物之后,使所述底板旋转到所述下降的竖直位置。
10.根据权利要求9所述的设备,其中,所述底板由捕捉件释放,以下降到所述竖直位置。
11.根据权利要求10所述的设备,还包括适于将所述底板复位到所述水平位置的复位提升器。
12.根据权利要求8所述的设备,还包括位于所述底板下方的收集箱,其中,有害动物尸体通过所述底板沉积到所述收集箱中。
13.根据权利要求1所述的设备,还包括沿着所述通道与所述撞击构件的相对侧隔开的两个平面传感器。
14.根据权利要求13所述的设备,其中,所述撞击构件被构造为当两个平面传感器都指示在其感测平面处存在所述有害动物时撞击所述有害动物。
15.根据权利要求14所述的设备,其中,所述两个平面传感器与所述撞击构件隔开相等距离。
16.根据权利要求15所述的设备,其中,所述两个平面传感器与所述撞击构件隔开与从目标有害动物的鼻子到颈部的距离相对应的距离。
17.根据权利要求1所述的设备,其中,所述撞击构件包括基本上竖直延伸的杆。
18.根据权利要求17所述的设备,其中,所述撞击构件在所述通道的相对侧的第一位置与第二位置之间可移动。
19.根据权利要求18所述的设备,还包括用于使所述撞击构件沿着动物击打路径在第一位置与第二位置之间移动的驱动机构。
20.根据权利要求19所述的设备,其中,所述驱动机构包括弹簧。
21.根据权利要求19所述的设备,还包括适于将所述撞击构件移动到所述第一位置的复位马达。
22.根据权利要求19所述的设备,其中,所述动物击打路径是线性的。
23.根据权利要求19所述的设备,其中,所述动物击打路径是弧形的。
24.根据权利要求19所述的设备,其中,所述动物击打路径是基本上水平的。
25.根据权利要求19所述的设备,其中,所述动物击打路径是基本上竖直的。
26.根据权利要求19所述的设备,还包括与所述第一位置相对的不可移动表面,其中,所述第二位置朝向所述不可移动表面。
27.根据权利要求1所述的设备,其中,所述路径包括基本上透明的壁。
28.根据权利要求1所述的设备,还包括诱饵分配器,所述诱饵分配器可操作为将诱饵排放到所述通道中。
29.一种用于控制有害动物的方法,包括:
30.根据权利要求29所述的方法,还包括:提供与所述撞击构件隔开与所述第一平面传感器相同距离的第二平面传感器。
31.根据权利要求30所述的方法,还包括:提供通向所述通道的各个端的第二入口。
32.一种用于控制有害动物的设备,包括:
33.根据权利要求32所述的设备,还包括位于所述底板下方的收集箱。
34.根据权利要求32所述的设备,其中,所述壳体在地面上方隔开,以将灭杀的有害动物沉积在其下方。
35.根据权利要求32所述的设备,其中,所述动物灭杀机构位于所述底板内。
36.根据权利要求34所述的设备,其中,所述动物灭杀机构包括带电板,所述带电板可操作为向其上的动物输送致命电荷。
37.根据权利要求32所述的设备,其中,所述动物灭杀机构包括适于向所述通道内的所述有害动物输送灭杀打击的撞击器。
38.根据权利要求32所述的设备,还包括传感器,所述传感器适于检测在所述通道内的期望位置处的目标有害动物的存在,以触发所述动物灭杀机构。
技术总结
一种用于控制有害动物的设备包括:壳体,该壳体具有从入口延伸到壳体中的通道;撞击构件,该撞击构件可移动穿过通道;以及平面传感器,该平面传感器沿着通道朝向入口与灭杀杆隔开预定距离,该平面传感器被配置为感测横穿穿过通道的感测平面的有害动物的存在,其中,当平面传感器指示存在穿过感测平面的有害动物时,撞击构件可操作为被释放以快速移动穿过通道。
技术研发人员:马克·克里赫尔,肯·高蒂尔,乔·阿伯罗姆比
受保护的技术使用者:捕获数据知识产权控股有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!