一种水稻智能育秧药物输送测控装置
1.本发明涉及农作物疾病预防技术领域,尤其涉及一种水稻智能育秧药物输送测控装置。
背景技术:
2.在农业生产过程中,研究软盘育秧是在“工厂化”硬盘育秧的基础上总结转化而来的育秧方式;
3.授权公告号为cn105223938a的专利公开了一种一种灌溉测控装置、灌溉测控系统及灌溉测控方法,涉及农业灌溉领域,主要目的在于提高土壤灌溉的水资源利用率。主要采用的技术方案为:灌溉测控装置,包括电动阀、第一传感器、第二传感器、控制单元和继电器。电动阀具有进水口和出水口;第一传感器设置在电动阀的进水口端,用于采集进水口端的进水流量;第二传感器用于采集土壤的含水量;控制单元分别与第一传感器和第二传感器连接,用于根据接收到的进水流量信息和土壤的含水量信息,采用预设的判定规则判定电动阀是否需要开启或关闭,并生成相应的控制信号;继电器分别与控制单元和电动阀连接,用于接收控制信号,并响应于控制信号,控制电动阀的启闭。
4.上述专利利用将远程控制对水进行灌溉,结合在实验室进行育秧需要人工持续介入,自动化程度低的特点,若在秧苗生病时无法及时对秧苗进行药物灌溉则会导致秧苗死亡,而秧苗的病症不一则无疑加剧了实验室远程疾病治疗的难度。
技术实现要素:
5.本发明的目的是针对背景技术中存在的问题,提出一种可远程针对秧苗不同的病症进行药物治疗的水稻智能育秧药物输送测控装置。
6.本发明的技术方案:一种水稻智能育秧药物输送测控装置,包括具有容纳腔体的测控装置主体以及将测控装置主体容纳腔体的内容物取出的调节机构;
7.所述测控装置主体包括沿其轴向设置的多个固定隔盘,多个所述固定隔盘将测控装置主体的容纳腔体等距分割为多个储料腔体,相邻的两个所述固定隔盘之间均转动设置有下料组件;
8.所述调节机构包括固定在测控装置主体两侧的安装壳体,安装壳体内均转动设置有转盘,其中一个所述安装壳体内侧设置有驱动电机b,驱动电机b输出轴固定有依次贯穿多个下料组件的直齿轮,直齿轮外侧滑动设置有可与下料组件啮合连接的随动盘。
9.优选的,所述下料组件包括转动安装在固定隔盘之间的下料环,下料环的外圆周面上等距开设有多个料槽;
10.所述料槽的内圆周面等距固定有多个磁吸件a;
11.所述下料环的周侧还开设有与固定隔盘契合的环形对接槽。
12.优选的,所述随动盘中部开设有与直齿轮匹配的;
13.所述随动盘外圆周面开设有多个避让槽,每个所述避让槽内均设置有可与磁吸件
a磁吸连接的避让组件;
14.所述避让槽的横切面呈梯形,避让组件处于避让槽的中部,避让组件在摆动时的角度限制为15
°
~30
°
。
15.优选的,所述避让组件包括通过自复位转轴安装在避让槽内的轴杆,轴杆的另一端固定有容置壳体;所述容置壳体内活动设置有t型拉板,t型拉板的另一端穿过t型拉板且固定有磁吸件b;
16.容置壳体内设置有套设在t型拉板的延伸段上的弹簧。
17.优选的,所述磁吸件b与磁吸件a均具有呈平面的啮合部分以及设置在两端的三角或弧形部分。
18.优选的,与驱动电机b处于对立侧的转盘上还设置有驱动随动盘沿着直齿轮移动的驱动组件;
19.所述驱动组件包括固定在转盘上的驱动电机a,驱动电机a的输出轴固定有螺纹杆,螺纹杆贯穿随动盘且与随动盘螺纹连接,螺纹杆与另一个所述转盘转动连接;
20.所述驱动组件还包括固定在转盘上的导向杆,导向杆的另一端贯穿随动盘且与另一个转盘固定。
21.优选的,所述测控装置主体上侧依次设置有与储料腔体对应的加注口;
22.所述测控装置主体下侧依次设置有对储料腔体的内容物出料的出料口;
23.所述测控装置主体内还设置有将储料腔体与出料口隔离的固定隔盘。
24.一种水稻智能育秧灌溉防病测控系统,包括上述的测控装置;
25.还包括相机模组,所述相机模组用于获取水稻苗的分布坐标信息;
26.驱动系统,所述驱动系统用于驱动测控装置移动;
27.中央处理模块,所述中央处理模块用于接收相机模组坐标信息同时控制驱动系统以及测控设备工作。
28.用于获取处于阵列分布的软盘的坐标信息;
29.中央处理模块,所述中央处理模块用于向测控装置以及驱动系统输送指令。
30.优选的,所述驱动系统由x轴驱动机构和y轴驱动机构共同组成,用于驱动测控装置在xy平面内移动。
31.优选的,所述中央处理模块通过基站与远程控制终端信号连接。
32.与现有技术相比,本发明具有如下有益的技术效果:
33.本发明通过避让组件在避让槽内摆动则完全可以使磁吸件b在磁吸件a接触时产生避让空间,由此避免错误啮合,保证了在调节选择药物时的准确性;
34.通过相机模组以及驱动系统可以在实验室环境下或者无人监守的情况下进行药物定量定点输送的操作。
附图说明
35.图1为本发明一种水稻智能育秧药物输送测控装置的结构示意图;
36.图2为本发明一种水稻智能育秧药物输送测控装置的另一视角结构示意图;
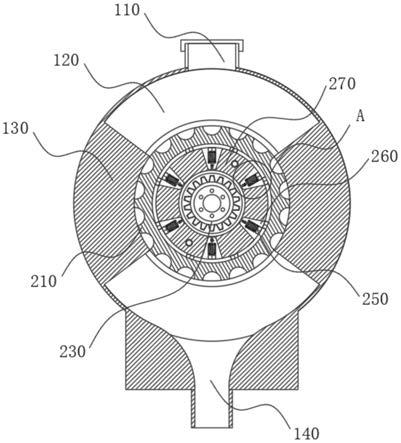
37.图3为本发明中测控装置主体的主视剖切结构示意图;
38.图4为图3中a处局部放大结构示意图;
39.图5为本发明中随动盘与直齿轮啮合的立体结构示意图;
40.图6为本发明中测控装置主体的侧视剖切结构示意图;
41.图7为本发明中随动盘与直齿轮啮合的俯视图;
42.图8为本发明中随动盘与直齿轮啮合的主视图;
43.图9为本发明中驱动组件的第一视角结构示意图;
44.图10为本发明中驱动组件的第二视角结构示意图;
45.图11为本发明中驱动组件的第三视角结构示意图;
46.图12为本发明中下料组件的立体结构示意图;
47.图13为本发明中下料组件的俯视结构示意图;
48.图14为本发明中实施例一的示意图;
49.图15为本发明中一种水稻智能育秧灌溉防病测控系统的结构框图。
50.附图标记:100测控装置主体;110加注口;120储料腔体;130固定隔盘;140出料口;
51.200调节机构;210下料组件;211下料环;212料槽;213环形对接槽;214磁吸件a;
52.220安装壳体;221转盘;
53.230直齿轮;250避让组件;251轴杆;252容置壳体;253弹簧;254t型拉板;255磁吸件b;
54.260避让槽;270随动盘;280驱动电机b;290驱动组件;291螺纹杆;
55.300育苗箱;400相机模组;500驱动系统;600软盘;700中央处理模块。
具体实施方式
56.下文结合附图和具体实施例对本发明的技术方案做进一步说明。
57.实施例一
58.如图1-2所示,本发明提出的一种水稻智能育秧药物输送测控装置,包括具有容纳腔体的测控装置主体100以及将测控装置主体100容纳腔体的内容物取出的调节机构200;
59.如图3和图6所示,测控装置主体100包括沿其轴向设置的多个固定隔盘130,多个固定隔盘130将测控装置主体100的容纳腔体等距分割为多个储料腔体120,相邻的两个固定隔盘130之间均转动设置有下料组件210;
60.结合图5所示,调节机构200包括固定在测控装置主体100两侧的安装壳体220,安装壳体220内均转动设置有转盘221,其中一个安装壳体220内侧设置有驱动电机b280,驱动电机b280输出轴固定有依次贯穿多个下料组件210的直齿轮230,直齿轮230外侧滑动设置有可与下料组件210啮合连接的随动盘270。
61.如图12和13所示,下料组件210包括转动安装在固定隔盘130之间的下料环211,下料环211的外圆周面上等距开设有多个料槽212;
62.料槽212的内圆周面等距固定有多个磁吸件a214;
63.下料环211的周侧还开设有与固定隔盘130契合的环形对接槽213。
64.如图8所示,随动盘270中部开设有与直齿轮230匹配的271;
65.参照图5以及图7,随动盘270外圆周面开设有多个避让槽260,每个避让槽260内均设置有可与磁吸件a214磁吸连接的避让组件250;
66.参照图4,避让槽260的横切面呈梯形,避让组件250处于避让槽260的中部,避让组
件250在摆动时的角度限制为15
°
~30
°
。
67.避让组件250包括通过自复位转轴安装在避让槽260内的轴杆251,轴杆251的另一端固定有容置壳体252;容置壳体252内活动设置有t型拉板254,t型拉板254的另一端穿过t型拉板254且固定有磁吸件b255;
68.容置壳体252内设置有套设在t型拉板254的延伸段上的弹簧253。
69.如图9-11所示,磁吸件b255与磁吸件a214均具有呈平面的啮合部分以及设置在两端的三角或弧形部分。
70.与驱动电机b280处于对立侧的转盘221上还设置有驱动随动盘270沿着直齿轮230移动的驱动组件290;
71.驱动组件290包括固定在转盘221上的驱动电机a,驱动电机a的输出轴固定有螺纹杆291,螺纹杆291贯穿随动盘270且与随动盘270螺纹连接,螺纹杆291与另一个转盘221转动连接;
72.驱动组件290还包括固定在转盘221上的导向杆292,导向杆292的另一端贯穿随动盘270且与另一个转盘221固定。
73.参照图3,测控装置主体100上侧依次设置有与储料腔体120对应的加注口110;
74.测控装置主体100下侧依次设置有对储料腔体120的内容物出料的出料口140;
75.测控装置主体100内还设置有将储料腔体120与出料口140隔离的固定隔盘130。
76.上述测控装置的操作如下,首先向储料腔体120内加入不同的药物,当秧苗处于病态时病态具有a1、b1、c1以及d1而不同的储料腔体120内具有不同针对a1、b1、c1以及d1病症不同的药物;如图6所示,图6中a、b、c以及d表示针对本实施例中的秧苗若是a1病症;
77.则驱动电机a工作驱动螺纹杆291转动,使随动盘270沿着导向杆292移动至与a对应的下料组件210处,在随动盘270移动过程中磁吸件b255靠近磁吸件a214会磁吸连接,而由于磁吸过程中,磁吸件b255克服了弹簧253的弹力从而与磁吸件a214吸附,(吸附状态为磁吸件a214的平面部与磁吸件b255的平面部吸附),而当经过非与a对应的下料组件210处由于磁吸件a214与磁吸件b255两端的形状,则使磁吸件a214与磁吸件b255错位避让,进而避免磁吸件b255与磁吸件a214的啮合位置错误;
78.此外,通过避让组件250在避让槽260内摆动则完全可以使磁吸件b255在磁吸件a214接触时产生避让空间;由此避免错误啮合;
79.当磁吸件b255与对应的下料组件210的磁吸件a214正确磁吸后,驱动电机b280工作,驱动直齿轮230转动,进而由于直齿轮230与随动盘270的齿合作用驱动下料组件210转动,在初始转动过程中,会有空挡期(即避让组件250在避让槽260内摆动),当避让组件250摆动至极限时,随着直齿轮230的转动即可使随动盘270与下料组件210转动,通过下料组件210与料槽212可以使储料腔体120内的药物通过出料口140排出,从而完成对指定病症的防病以及药物灌溉治疗;需要说明的是,在驱动电机b280转动过程中,由于转盘221的转动使得不会影响驱动电机a的正常运转;
80.当需要对其他秧苗进行不同的药物防病灌溉治疗时,只需按照上述步骤,将随动盘270移动至指定的下料组件210处,再进行排药操作即可。
81.实施例二
82.如图15所示,本发明提出的一种水稻智能育秧灌溉防病测控系统,包括上述的测
控装置;还包括相机模组400,相机模组400为工业相机,相机模组400用于获取水稻苗的分布坐标信息;
83.驱动系统500,驱动系统500用于驱动测控装置移动;
84.中央处理模块700,中央处理模块700用于接收相机模组400坐标信息同时控制驱动系统500以及测控设备工作。
85.用于获取处于阵列分布的软盘600的坐标信息;
86.中央处理模块700,中央处理模块700用于向测控装置以及驱动系统500输送指令。
87.驱动系统500由x轴驱动机构和y轴驱动机构共同组成,用于驱动测控装置在xy平面内移动。
88.中央处理模块700通过基站与远程控制终端信号连接。
89.如图14所示,图14示意性的示出了实验室中水稻智能育秧灌溉防病测控系统的一种实施方式,图中相机模组400安装在育苗箱300内部顶壁,育苗箱300底部为软盘600,相机模组400扫描软盘600的坐标位置;当处于软盘600内的秧苗具有某一病症时,通过驱动系统500调节测控装置的位置,使指定治疗相应病症的药物位于软盘600正上方,然后通过中央处理模块700和远程控制终端控制测控装置作出对应的操作。
90.上述具体实施例仅仅是本发明的几种优选的实施例,基于本发明的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1