一种智能养殖机器人设备的制作方法
1.本发明涉及机器人设备技术领域,尤其是涉及一种智能养殖机器人设备。
背景技术:
2.精养是在小型水域中用投饵、施肥方法养成水产品,如池塘养鱼、养虾蟹、网箱养鱼和围栏养殖等。随着人们对鱼虾蟹类水产品的需求快速增加,精养水产养殖面积不断扩大,从而导致工作量大,人员成本高,且效率低下。此外人工养殖不能精准掌握水下情况,也未能根据鱼虾密度进行合理投喂,灵活度低,特别是在出现恶劣天气时大大影响了养殖人员工作效率和安全性。
技术实现要素:
3.本发明针对现有技术中存在的问题,提供了一种可大大降低工作量和人员成本,提高工作效率和灵活度的智能养殖机器人设备。
4.为了解决上述技术问题,本发明的技术方案是:一种智能养殖机器人设备,包括载体,设于所述载体上的中央处理器和蓄电池,以及与所述中央处理器和蓄电池连接的割草机构、打捞水草机构、图像识别机构、推进机构、投料机构、照明装置;所述载体包括壳体和与壳体相适配的壳盖,所述壳体和壳盖之间形成腔体,所述中央处理器和蓄电池位于所述腔体内,所述图像识别机构位于载体上方的头部,所述投料机构位于载体上方的尾部,所述割草机构和打捞水草机构沿所述载体的侧面靠近底部位置依次设置,所述推进机构设于载体的底面,所述中央处理器还与人工控制端信号连接。
5.进一步的,所述图像识别机构包括视觉识别装置和套设于视觉识别装置外周的防水罩,所述防水罩采用透明材料制成且与壳体无缝连接,所述视觉识别装置包括依次连接的摄像机、摄像机支架和第一电机,所述摄像机安装于摄像机支架上,所述第一电机带动摄像机支架在水平空间内转动,所述摄像机和第一电机均与中央处理器信号连接。
6.进一步的,所述投料机构包括由上至下依次连接的箱体盖、箱体、投料盘、转接盘和第二电机,所述箱体盖可相对箱体转动,所述箱体下方固定于壳盖上,且箱体的顶部开设装料孔,底部设有出料口,所述第二电机位于所述腔体内且与所述中央处理器和蓄电池连接。
7.进一步的,所述箱体包括依次连接的上箱体和下箱体,所述装料孔设于上箱体的顶部,所述出料口设于所述下箱体的底部,所述下箱体的下端固定于壳盖上,所述下箱体采用透明材料制成。
8.进一步的,所述投料盘和转接盘之间以及转接盘和第二电机之间固定连接,所述投料盘上设置有螺旋槽,所述螺旋槽的上端置于下箱体的出料口中且尺寸与出料口适配,所述第二电机带动投料盘旋转,从而使下箱体中的饲料沿螺旋槽输送到投料盘中。
9.进一步的,所述第二电机固定在壳盖上,且第二电机的电机轴与壳盖之间设有动密封件,所述动密封件为o形圈密封或机械密封或组合密封或磁流体密封。
10.进一步的,所述照明装置包括沿所述壳体周围设置的多个led灯,所述led灯与蓄电池和中央处理器连接,所述led灯外周设有防水灯罩,所述防水灯罩与壳体之间采用静密封。
11.进一步的,所述割草机构包括两个相对于载体对称设置且刀刃朝外的镰刀,所述壳体的底部设有与所述镰刀相适配的卡槽,所述镰刀的其中一端固定在所述卡槽中。
12.进一步的,所述打捞水草机构包括两个相对于载体对称设置的打捞钩,所述打捞钩包括一体成型的上弯钩和下弯钩。
13.进一步的,所述推进机构包括两个相对于载体对称设置的螺旋桨,所述螺旋桨与所述中央处理器连接,所述中央处理器控制两个螺旋桨的转速差以实现前进和转向。
14.本发明公开了一种智能养殖机器人设备,包括载体,设于载体上的中央处理器和蓄电池,以及与中央处理器和蓄电池连接的割草机构、打捞水草机构、图像识别机构、推进机构、投料机构、照明装置;载体包括壳体和与壳体相适配的壳盖,壳体和壳盖之间形成腔体,中央处理器和蓄电池位于腔体内,图像识别机构位于载体上方的头部,投料机构位于载体上方的尾部,割草机构和打捞水草机构沿载体的侧面靠近底部位置依次设置,推进机构设于载体的底面,所述中央处理器还与人工控制端信号连接。该智能养殖机器人设备能根据鱼虾密度进行合理投喂,灵活度高,且结构简单、成本低、环境适应性好,降低了人工成本,减少了养殖人员的工作量,提高了水产养殖的效率,特别是在恶劣天气时可保证工作效率和安全性。
附图说明
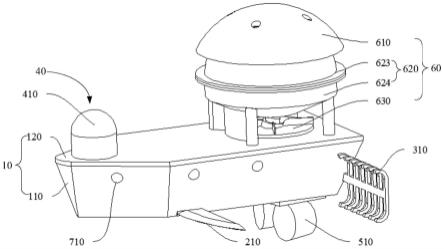
15.图1是本发明一具体实施例中智能养殖机器人设备的结构示意图;
16.图2是本发明一具体实施例中智能养殖机器人设备的俯视图;
17.图3是本发明一具体实施例中视觉识别装置的结构示意图;
18.图4是本发明一具体实施例中投料机构的剖视图;
19.图5是本发明一具体实施例中的投料盘的结构示意图。
20.图中所示:10、载体;110、壳体;120、壳盖;20、割草机构;210、镰刀;30、打捞水草机构;310、打捞钩;40、图像识别机构;410、视觉识别装置;411、摄像机;412、摄像机支架;413、第一电机;420、防水罩;50、推进机构;510、螺旋桨;60、投料机构;610、箱体盖;620、箱体;621、装料孔;622、出料口;623、上箱体;624、下箱体;630、投料盘;631、螺旋槽;632、叶片;640、转接盘;650、第二电机;710、led灯。
具体实施方式
21.下面结合附图对本发明作详细描述:
22.如图1所示,本发明一种智能养殖机器人设备,包括载体10,设于所述载体10上的中央处理器和蓄电池(图中均未示出),以及与所述中央处理器和蓄电池连接的割草机构20、打捞水草机构30、图像识别机构40、推进机构50、投料机构60、照明装置;所述载体10包括壳体110和与壳体110相适配的壳盖120,所述壳体110和壳盖120之间形成腔体,所述中央处理器和蓄电池位于所述腔体内,具体的,壳体110可以是塑料注塑或者采用多块不锈钢折弯焊接形成空心船体的形状,头部窄后尾部宽,便于前进时减少阻力,当然也可以是其他形
状,此处不做限制。壳盖120采用不锈钢加工而成,两者之间可以用o形圈或者橡胶垫做防水静密封。载体10的吃水深度要通过载体10上的配重进行调节。本技术中,载体10的头部和尾部是相对于载体10前进的方向而设定。
23.如图3所示,所述图像识别机构40位于载体10上方的头部,其包括视觉识别装置410和套设于视觉识别装置410外周的防水罩420,所述防水罩420采用透明材料制成且与壳体110无缝连接,所述视觉识别装置410包括依次连接的摄像机411、摄像机支架412和第一电机413,所述摄像机411安装于摄像机支架412上,所述第一电机413带动摄像机支架412在水平空间内转动,所述摄像机411和第一电机413均与中央处理器信号连接。具体的,摄像机411安装在摄像机支架412上并保持固定的俯角和高度,摄像机支架412在第一电机413的带动下水平面内旋转,从而实现摄像机411水平360
°
扫描,并将扫描图像传输给中央处理器,所述中央处理器控制所述第一电机413的运动。防水罩420是透明的,以便于摄像机411可以拍摄到清晰的视频,并与壳盖120之间做好防水静密封,防水罩420可以采用透明亚克力制成。
24.如图4所示,所述投料机构60位于载体10上方的尾部,所述投料机构60包括由上至下依次连接的箱体盖610、箱体620、投料盘630、转接盘640和第二电机650,所述箱体盖610与箱体620之间可拆卸连接,所述箱体620的顶部开设装料孔621,在添料时将箱体盖610拆卸下来,即可往装料孔621中添料,添料结束之后将箱体盖610盖上并与箱体620之间固定好。箱体620下方固定于壳盖120上,底部设有出料口622,所述第二电机650位于所述腔体内且与所述中央处理器和蓄电池连接,由中央处理器控制运动,并由蓄电池进行供电。所述箱体620包括依次连接的上箱体623和下箱体624,所述装料孔621设于上箱体623的顶部,所述出料口622设于所述下箱体624的底部,所述下箱体624的下端固定于壳盖120上,所述下箱体624采用透明材料制成,以便于观察饲料的储量。所述投料盘630和转接盘640之间以及转接盘640和第二电机650之间固定连接,所述投料盘630上设置有螺旋槽631,所述螺旋槽631的上端置于下箱体624的出料口622中且尺寸与出料口622适配,所述第二电机650带动投料盘630旋转,从而使下箱体624中的饲料沿螺旋槽631输送到投料盘630中。具体的,如图5所示,投料盘630上表面沿径向均匀设有若干叶片632,在工作时,螺旋槽631的旋向与投料盘630的旋转方向(从设备顶部看)存在两种情况,第一种,当中央处理器控制第二电机650带动投料盘630沿顺时针方向时,螺旋槽631为左旋螺旋槽,此时下箱体624中的料便会沿着螺旋槽631掉落在投料盘630面上,并沿着投料盘630上的叶片632旋转后喷洒在水面上;第二种,当中央处理器控制第二电机650带动投料盘630沿逆时针方向时,螺旋槽631为右旋螺旋槽,使下箱体624中的料便会沿着螺旋槽631掉落在投料盘630面上,本实施例是采用的第一种情况。所述第二电机650固定在壳盖120上,且第二电机650的电机轴与壳盖120之间设有动密封件,所述动密封件可以是o形圈密封或机械密封或组合密封或磁流体密封。箱体盖610的尺寸大于箱体620的顶面,从而可以防止雨水进入箱体620,投料机构60属于上面宽大,下面窄小的上下结构,使得智能养殖机器人设备在雨天等恶劣环境下也可以正常工作。
25.如图1所示,所述割草机构20和打捞水草机构30沿所述载体10的侧面靠近底部位置依次设置,所述推进机构50设于载体10的底面。优选的,所述割草机构20包括两个相对于载体10对称设置且刀刃朝外的镰刀210,所述壳体110的底部设有与所述镰刀210相适配的卡槽,所述镰刀210的其中一端固定在所述卡槽中。镰刀210的刀刃朝外,整个刀刃向载体10
后部倾斜,可以避免在工作的时候水草堆积。所述打捞水草机构30包括两个相对于载体10对称设置的打捞钩310,所述打捞钩310包括一体成型的上弯钩和下弯钩。本实施例中,打捞钩310可以是不锈钢激光切割后折弯而成,打捞钩310的上弯钩和下弯钩上下对称设置可以将水面或着水下的漂浮物和切断的水草进行打捞。
26.优选的,所述中央处理器负责数据处理和系统控制,可以是fpga、以dsp为核心的开发板或以cpu为核心的微型计算机,该机器人装置还包括与所述中央处理器信号连接的人工控制端,该人工控制端可以是手机端或pc端,用于接收中央处理器的信息并进行人工控制。
27.优选的,所述照明装置包括沿所述壳体110周围设置的多个led灯710,所述led灯710与蓄电池和中央处理器连接,所述led灯710外周设有防水灯罩,所述防水灯罩与壳体110之间采用静密封,如采用胶水粘接等。中央处理器根据周围环境亮度控制led灯710开启或关闭,从而在环境黑暗的地方给图像识别机构40提供光源,由蓄电池供电,由中央处理器控制工作。
28.如图2所示,所述推进机构50包括两个相对于载体10对称设置的螺旋桨510,所述螺旋桨510与所述中央处理器连接,所述中央处理器控制两个螺旋桨510的转速差以实现前进和转向。
29.本实施例中智能养殖机器人设备工作原理为:预先将水域地图信息输入到中央处理器中,在中央处理器中编写图像识别定位和路径规划程序,首先按照初始的水域地图规划好基本路径,在智能养殖机器人设备按照基本路径行驶过程中摄像机411保持周期性的图像采集并通过运行图像识别和定位程序获取水草、浮游植物以及鱼、虾蟹群位置之后,中央处理器控制智能养殖机器人设备后续路线。
30.图像识别机构中的中央处理器根据摄像机411图像采集信息控制投料机构60的原理具体为:一是根据图像采集信息确定鱼、虾、蟹群的数量信息,当数量多时,中央处理器给第二电机650发送控制信号,使其增大转速,加快撒料速度,同时给推进机构50发送控制信号,使载体10的速度减慢,反之当数量少或没有时,使第二电机650转速减慢或者停转,同时使载体10速度增加;二是根据图像采集信息确定下箱体624中的饲料储量,当达到警戒线时中央处理器会控制推进机构50,将载体10靠岸,并把信息反馈到人工控制端,提示工作人员加料。
31.图像识别机构40中的中央处理器根据摄像机411图像采集信息控制打捞水草机构30原理,根据图像采集信息确定打捞钩310上的水草量,当打捞的水草量达到一定量时,会通过中央处理器控制推进机构50,将载体10靠岸,并信息反馈到人工控制端,提示工作人将水草打捞到岸边。
32.割草机构20和打捞水草机构30在不是水草茂盛的季节可以拆下来,作为投料和巡视水面的机器人。
33.综上所述,本发明提供了一种智能养殖机器人设备,包括载体10,设于所述载体10上的中央处理器和蓄电池,以及与所述中央处理器和蓄电池连接的割草机构20、打捞水草机构30、图像识别机构40、推进机构50、投料机构60、照明装置;所述载体10包括壳体110和与壳体110相适配的壳盖120,所述壳体110和壳盖120之间形成腔体,所述中央处理器和蓄电池位于所述腔体内,所述图像识别机构40位于载体10上方的头部,所述投料机构60位于
载体10上方的尾部,所述割草机构20和打捞水草机构30沿所述载体10的侧面靠近底部位置依次设置,所述推进机构50设于载体10的底面,还包括与所述中央处理器信号连接的人工控制端。该智能养殖机器人设备能根据鱼虾密度进行合理投喂,灵活度高,且结构简单、成本低、环境适应性好,降低了人工成本,减少了养殖人员的工作量,提高了水产养殖的效率,特别是在恶劣天气时可保证工作效率和安全性。
34.虽然说明书中对本发明的实施方式进行了说明,但这些实施方式只是作为提示,不应限定本发明的保护范围。在不脱离本发明宗旨的范围内进行各种省略、置换和变更均应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1