一种声光电组合诱虫及灭虫系统的制作方法
1.本发明涉及农业生产技术领域,具体为一种声光电组合诱虫及灭虫系统。
背景技术:
2.传统的杀虫灯多采用紫外灯管,普通的黄光和蓝光led作为诱虫光源,采用通电的金属网电击飞虫,实践证明,对很多种类的爬虫(特别是带角质层的爬虫)无效。普通的光源在室外环境使用寿命短。
3.半导体光电技术用于现代农业是一种新思路,随着芯片技术,算法越来越先进,应用步伐会加快,现有的杀虫设备或者系统无法根据针对的害虫不同调整该害虫的敏感光源波长,且诱虫的波长功能单一;无法鉴别有益的昆虫以免错杀;成本较高,无法满足一般菜农果农的需求。
技术实现要素:
4.本发明的目的是克服现有技术中的不足之处,提供一种声光电组合诱虫及灭虫系统,该诱虫及灭虫系统:设有诱捕系统、定位识别系统、杀虫系统及数据系统,启动时,诱捕系统从数据系统获得相应的害虫数据,根据数据发出特定的诱捕害虫的信号,该信号可以是声、光或者化学信号,诱捕系统设有发光机构及发声机构,通过特定波长的光及声音频率,将害虫吸引入本诱虫及灭虫系统,害虫进入后,会被定位识别系统感应并识别,同时生成位置信息及外形信息,将该信息上传至数据系统,数据系统首先将收到的外形信息进行配对,确定该昆虫为益虫或者害虫,当确定该昆虫为害虫时,在由数据系统将该位置信息交由杀虫系统,通过杀虫系统击杀害虫,杀虫系统设有激光杀虫装置,且杀虫装置为半导体瓦级激光器,波长650纳米,所述激光杀虫装置为复数个,根据位置信息,激光杀虫装置进行位置调整,在预设位置击杀害虫,在不使用时,发光机构可照射植物,促进植物生长,本系统采用多种诱捕方式,诱捕效果优异,具有针对性强,灭虫效果好的优点。
5.本发明的目的是通过以下技术方案来实现的:
6.一种声光电组合诱虫及灭虫系统,包括诱捕系统、定位识别系统、杀虫系统及数据系统,数据系统用于存储害虫数据,如害虫喜欢的光照波长、声音的频率,以及当前季节可能出现的害虫,害虫的外形数据,数据系统可以与云端连接,也可通过移动存储设备将数据导入,诱捕系统可以从数据系统获得当前需要诱捕害虫的数据,根据数据调整发出的声音及光线,将害虫引入诱虫及灭虫系统中,定位识别系统可识别进入诱虫及灭虫系统的昆虫的外形及其的具体位置,形成外形数据及三维坐标并将数据上传至数据系统,数据系统进行分析,对外形进行匹配,判断是否为害虫,若为害虫,则杀虫系统即可从数据系统获得害虫的三维坐标将其击杀,击杀后的害虫尸体在重力作用下会从诱虫及灭虫系统跌落,不会积累在诱虫及灭虫系统内;
7.所述诱捕系统用于诱捕害虫,将害虫诱捕至杀虫系统中,所述诱捕系统设有数据接口一、发光机构及发声机构,所述数据接口一与数据系统连接,通过数据接口一从数据系
统获得工作数据,在将数据分配到发光机构及发声机构,由发光机构及发声机构进行执行,发出特定频率的声音和特定波长的光照,诱捕特定的害虫,使得害虫进入诱虫及灭虫系统中,诱捕系统可以根据季节、害虫类别的不同,进行精准诱捕,且发光系统可用于照射植物,系统控制者可以通过数据系统调整光照波长,使其达到促进植物生长的效果,丰富本系统的功能;
8.所述定位识别系统用于识别落入诱虫及灭虫系统中昆虫的种类及其所在位置的具体坐标,所述定位识别系统设有定位装置、识别装置及数据接口二,所述数据接口二与数据系统连接,通过定位装置识别昆虫所在位置生成坐标数据,通过识别装置识别昆虫的外形,生成形状数据,定位识别系统通过数据接口二将坐标数据及形状数据上传至数据系统,昆虫进入诱虫及灭虫系统时,定位识别系统即可进行感应,实时更新昆虫的位置坐标及外形数据并且上传,便于数据系统分辨害虫益虫,生成击杀坐标;
9.所述杀虫系统用于击杀落入诱虫及灭虫系统中害虫,所述杀虫系统设有激光杀虫装置及第三数据接口,所述所述数据接口三与数据系统连,通过数据系统获得害虫的位置数据,激光杀虫装置根据位置数据进行位置及角度调整后击杀害虫;通过激光将害虫烧灼洞穿,使其失去活性,跌落出杀虫系统;
10.所述数据系统用于存储害虫相关数据或者从云端获得数据,所述数据系统设有数据接口四,所述数据接口四与数据接口一、数据接口二及数据接口三连接,数据系统可以从云端或移动存储设备上获得最新的害虫数据,将定位识别系统发送的数据进行整合、分析、配对,快速识别落入诱虫及灭虫系统中的昆虫为害虫还是益虫,若为害虫则计算出最佳击杀害虫的位置,将该数据传输至杀虫系统,根据该数据杀虫系统执行杀虫行为。
11.在其中一个实施例中,发光机构由蓝光led,黄光led及紫外led组成,可以诱捕大部分害虫,保证诱虫及灭虫系统可以针对多种害虫,为植物提供复合保护,所述蓝光led、黄光led及紫外led可根据数据接口一接收到的数值对光源波长进行调整,可针对特定的害虫进行光源调整,精准诱捕,提高诱虫及灭虫系统的精度,避免诱杀益虫。
12.在其中一个实施例中,发声机构由次声波发生装置及超声波发生装置组成,所述发声机构通过数据接口一从数据系统中获得发声数据,调整发声音频,诱捕特定的害虫,提高诱虫及灭虫系统的精度,避免诱杀益虫。
13.在其中一个实施例中,所述定位装置设有tof探测装置,所述识别装置为垂直腔面发射激光器,所述垂直腔面发射激光器及tof探测装置动态捕捉落入落入诱虫及灭虫系统中昆虫的形状及其所在位置的具体坐标的三维坐标,通过数据接口二将数据传输至数据系统中,当昆虫进入诱虫及灭虫系统时,垂直腔面发射激光器及tof探测装置同时启动,对进入的昆虫进行三维坐标的计算及识别昆虫的外形,将两者数据进行整合后再向数据系统传输数据。
14.在其中一个实施例中,激光杀虫装置为半导体瓦级激光器,且波长650纳米,所述激光杀虫装置为复数个,可同时杀灭多个害虫,可以多个杀虫装置同时启动,击杀同一害虫,从多个角度发射激光,防止害虫逃生,提高击杀效率。
15.在其中一个实施例中,蓝光led的波长为450纳米,所述黄光led的波长为580纳米,紫外led的波长为365纳米,可精准诱捕害虫,防止击杀益虫,有效保护益虫。
16.在其中一个实施例中,诱虫及灭虫系统包括以下步骤:
17.(1)将害虫信息收集、整理、归类及录入;
18.(2)数据系统通过云端/输入端获得害虫信息;
19.(3)诱捕系统从数据系统获得害虫信息;
20.(4)发光机构及发声机构根据害虫信息发声、发光;
21.(5)定位识别系统通过定位装置及识别装置确定进入诱虫及灭虫系统昆虫的形状及三维坐标;
22.(6)定位识别系统将形状数据及三维坐标传送至数据系统中;
23.(7)数据系统对输入的形状数据进行匹对,如果是害虫则向灭虫系统发出击杀指令;
24.(8)杀虫系统从数据系统获得害虫的三维坐标;
25.(9)杀虫系统启动半导体瓦级激光器击杀害虫。
26.通过上述步骤,即可诱捕击杀特定的昆虫,使其飞入诱虫及灭虫系统中,被定位识别系统定位并识别,确定其坐标及外形,然后将数据上传至数据系统,数据系统对进入本诱虫及灭虫系统中的昆虫外形与数据系统中要击杀的害虫外形进行匹配,若匹配成功,则通过杀虫系统击杀该害虫,若为益虫,则不对其进行攻击,周而复始,完成多次对害虫的诱捕及击杀,进而减少害虫对植物的危害。
27.本发明有益效果:
28.1、本发明在性能上:
29.(1)避免使用农药;
30.(2)可以通过大数据中心共享虫害信息;
31.(3)可以为相关部门提供区域性虫害信息;
32.(4)可以识别不同种类多昆虫,并通过数据统计发现新物种及防治方法;
33.(5)可以通过共享数据获得有效的诱虫声光频率;
34.(6)可以灭杀甲壳类害虫以及农药和常规的电触网无法灭杀的害虫。
附图说明
35.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
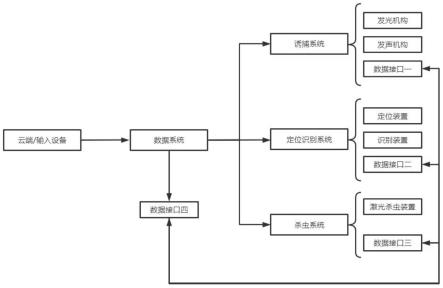
36.图1为本发明系统结构示意图。
具体实施方式
37.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
38.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接
到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
39.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
40.请参阅图1:一种声光电组合诱虫及灭虫系统,包括诱捕系统、定位识别系统、杀虫系统及数据系统,启动时,诱捕系统从数据系统获得相应的害虫数据,根据数据发出特定的诱捕害虫的信号,该信号可以是声、光或者化学信号,进入本诱虫及灭虫系统的害虫会被定位识别系统感应并识别,同时生成位置信息,外形信息,并将该信息上传至数据系统,在由数据系统匹配分析后,识别出害虫及益虫,将害虫的位置信息交由杀虫系统,通过杀虫系统击杀害虫;
41.所述诱捕系统用于诱捕害虫,将害虫诱捕至杀虫系统中,所述诱捕系统设有数据接口一、发光机构及发声机构,所述数据接口一与数据系统连接,通过数据接口一从数据系统获得工作数据,在将数据分配到发光机构及发声机构,由发光机构及发声机构进行执行,诱捕系统工作时,通过数据接口一与数据系统保持持续传输,从数据接口实时获得害虫最新数据及将发光机构及发声机构的工作数据上传,便于害虫系统控制者实时调控;
42.所述定位识别系统用于识别落入诱虫及灭虫系统中昆虫种类及其所在位置的具体坐标,所述定位识别系统设有定位装置、识别装置及数据接口二,所述数据接口二与数据系统连接,通过定位装置识别昆虫所在位置生成坐标数据,通过识别装置识别昆虫的外形,生成形状数据,定位识别系统通过数据接口二将坐标数据及形状数据上传至数据系统,定位识别系统工作时,通过数据接口二与数据系统保持持续传输,实时更新落入本诱虫及灭虫系统的外形数据及位置数据,形成昆虫移动路径,便于数据系统分析落入本诱虫及灭虫系统的昆虫为益虫或者害虫,若为害虫则计算击杀害虫的具体位置;
43.所述杀虫系统用于击杀落入诱虫及灭虫系统中害虫,所述杀虫系统设有激光杀虫装置及第三数据接口,所述所述数据接口三与数据系统连,通过数据系统获得害虫的位置数据,激光杀虫装置根据位置数据进行位置及角度调整后击杀害虫,杀虫系统工作时,通过数据接口三与数据系统保持持续传输,获取击杀害虫的预设位置,进而进行角度位置的调整,实现精准击杀害虫;
44.所述数据系统用于存储害虫相关数据或者从云端获得数据,所述数据系统设有数据接口四,所述数据接口四与数据接口一、数据接口二及数据接口三连接,数据系统工作时,可以从云端或者移动存储设备上获得害虫相关数据,将该数据分类后通过数据接口一、数据接口二及数据接口三传输至诱捕系统、定位识别系统、杀虫系统,使得三个系统之间分工明确,形成交互,精准杀虫。
45.较佳地,发光机构由蓝光led,黄光led及紫外led组成,所述蓝光led、黄光led及紫外led可根据数据接口一接收到的数值对光源波长进行调整。
46.通过采用上述技术方案,在发光机构工作时,可以根据数据接口一接收到的数值即时调整蓝光led,黄光led及紫外led的波长,也可根据诱捕工作的需要,启动特定颜色的led,或者对不同颜色led进行组合发光,进一步提高诱捕害虫的范围,提高诱捕工作的精
度,使得本诱虫及灭虫系统可以胜任多种生态环境下的灭虫工作。
47.较佳地,发声机构由次声波发生装置及超声波发生装置组成,所述发声机构通过数据接口一从数据系统中获得发声数据,调整发声音频。
48.通过采用上述技术方案,次声波发生装置及超声波发生装置可以单独工作也可组合工作,系统控制这可以通过数据系统对发声工作进行调控,诱捕工作进行时,发光机构与发声机构同时工作,相辅相成,通过视觉及听觉诱捕害虫,完成诱捕工作。
49.较佳地,定位装置设有tof探测装置,所述识别装置为垂直腔面发射激光器,所述垂直腔面发射激光器及tof探测装置动态捕捉落入诱虫及灭虫系统中昆虫的形状和所在位置的具体坐标的三维坐标,通过数据接口二将数据传输至数据系统中。
50.通过采用上述技术方案,垂直腔面发射激光器的横向结构形状通常为圆形,输出的光斑近似圆形,发散角很小,能够和光纤高效耦合;垂直腔面发射激光器的腔长为一个波长量级,具有单纵模输出、阈值电流低、调制带宽大、易于二维阵列集成、制作成本低等独特的优势,可精准识别落入本系统中的昆虫外形,生成外形数据,交由数据系统进行分析,tof探测装置采用tof测距方法,该方法属于双向测距技术,它主要利用信号在两个异步收发机(transceiver) (或被反射面)之间往返的飞行时间来测量节点间的距离。传统的测距技术分为双向测距技术和单向测距技术。在信号电平比较好调制或在非视距视线环境下,基于rssi(received signal strength indication,接收的信号强度指示) 测距方法估算的结果比较理想;在视距视线环境下,基于tof距离估算方法能够弥补基于rssi距离估算方法的不足,通过tof测距方法,可准确的计算出落入诱虫及灭虫系统中昆虫的位置数据,生成其移动路径,方便数据系统对其位置进行判断,tof探测装置和垂直腔面发射激光器两者结合,精准、实时捕捉昆虫的位置变动,生成移动路径,及外形数据,便于数据系统区分害虫及益虫,预判击杀害虫的位置。
51.较佳地,激光杀虫装置为半导体瓦级激光器,且波长650纳米,所述激光杀虫装置为复数个。
52.通过采用上述技术方案,半导体激光器又称激光二极管,是用半导体材料作为工作物质的激光器。由于物质结构上的差异,不同种类产生激光的具体过程比较特殊。常用工作物质有砷化镓(gaas)、硫化镉(cds)、磷化铟(inp)、硫化锌(zns)等。激励方式有电注入、电子束激励和光泵浦三种形式。半导体激光器件,可分为同质结、单异质结、双异质结等几种。同质结激光器和单异质结激光器在室温时多为脉冲器件,而双异质结激光器室温时可实现连续工作,且激光杀虫装置采用波长650纳米可发出足够击杀害虫的激光,且数量为复数个,在击杀工作进行时,至少启动两个激光杀虫装置,确保害虫被杀死。
53.较佳地,蓝光led的波长为450纳米,所述黄光led的波长为580纳米,紫外led的波长为365纳米。
54.通过采用上述技术方案,可以吸引不同种类的害虫,使得诱捕范围广,覆盖害虫种类多,可以胜任复杂的灭虫工作。
55.较佳地,诱虫及灭虫系统包括以下步骤:
56.(1)将害虫信息收集、整理、归类及录入;
57.(2)数据系统通过云端/输入端获得害虫信息;
58.(3)诱捕系统从数据系统获得害虫信息;
59.(4)发光机构及发声机构根据害虫信息发声、发光;
60.(5)定位识别系统通过定位装置及识别装置确定进入诱虫及灭虫系统昆虫的形状及三维坐标;
61.(6)定位识别系统将形状数据及三维坐标传送至数据系统中;
62.(7)数据系统对输入的形状数据进行匹对,如果是害虫则向灭虫系统发出击杀指令;
63.(8)杀虫系统从数据系统获得害虫的三维坐标;
64.(9)杀虫系统启动半导体瓦级激光器击杀害虫。
65.通过采用上述技术方案,首先根据需要灭虫的环境、季节收集整理要杀灭害虫的讯息,整理成数据,诱虫及灭虫系统启动时,即可从云端/输入端获得害虫信息,存储在数据系统内,数据载入后,诱虫及灭虫系统即可开始灭虫工作,发光机构及发声机构根据害虫信息发声、发光将害虫吸引入本系统,定位识别系统通过垂直腔面发射激光器及tof探测装置确定进入诱虫及灭虫系统昆虫的三维坐标,外形数据,并将两组数据上传至数据系统,数据系统分析将害虫与益虫进行区分,计算害虫的移动路径,确定击杀坐标,将坐标传送给杀虫系统,再有杀虫系统启动半导体瓦级激光器击杀害虫。
66.工作原理:使用前,根据需要灭虫的环境、季节收集整理要杀灭害虫的讯息,整理成数据,诱虫及灭虫系统启动时,即可从云端/输入端获得害虫信息,存储在数据系统内,数据载入后,诱虫及灭虫系统即可开始灭虫工作;
67.使用时,发光机构及发声机构根据害虫信息发声、发光将害虫吸引入本系统,发光机构工作时,可以根据数据接口一接收到的数值即时调整蓝光led,黄光led及紫外led的波长,也可根据诱捕工作的需要,启动特定颜色的led,或者对不同颜色led进行组合发光,进一步提高诱捕害虫的范围,提高诱捕工作的精度,发声机构设有次声波发生装置及超声波发生装置,两者可以单独工作也可组合工作,系统控制这可以通过数据系统对发声工作进行调控,诱捕工作进行时,发光机构与发声机构同时工作,相辅相成,定位识别系统通过垂直腔面发射激光器及tof探测装置确定进入诱虫及灭虫系统昆虫的三维坐标及外形数据,数据系统分析将害虫与益虫进行区分,并对害虫的移动路径进行分析,确定击杀坐标,将坐标传送给杀虫系统,再有杀虫系统启动半导体瓦级激光器击杀害虫,激光杀虫装置采用波长650纳米可发出足够击杀害虫的激光,且数量为复数个,在击杀工作进行时,至少启动两个激光杀虫装置,确保害虫被杀死。
68.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1