一种荻笋种植方法及其采收装置与流程
1.本发明涉及荻笋种植技术领域,特别涉及一种荻笋种植方法及其采收装置。
背景技术:
2.荻笋是“南荻”的嫩芽,生长在长江和湖泊的滩涂湿地上,特殊的地理、水质、土壤、气候等自然环境,使荻笋品质天然野生、绿色环保、健康养生,具有国内同类地区难以复制的优势。
3.随着生活水平提升,荻笋作为健康食品的高纤维素、低脂肪、富含多种微量元素等营养价值被人们所认识,加之人们对食品安全的关注,使荻笋的市场知名度逐步提升,需求越来越大,现有的荻笋都是采用人工采收的方式,人工进行采收时,需要弯腰一个个拔出荻笋,导致采收的劳动强度大,采收速度慢。
技术实现要素:
4.本发明的目的是提供一种荻笋种植方法及其采收装置,旨在解决荻笋采收的劳动强度大,采收速度慢的问题。
5.本发明的上述技术目的是通过以下技术方案得以实现的:一种荻笋种植方法,包括如下步骤:
6.s1、种植地整理:选择土地肥沃、水量充沛、排灌方便的江湖洲滩作为种植地,将地表深翻20-30cm;同时将种植地中的杂草和板结的土块清除干净,每亩土地均匀深埋有机肥1000-1500kg,晾晒2-3天;
7.s2、密植栽培:按0.8-1.0m行距开沟定植,株距25-30cm;
8.s3、田间管理:种植25-30天后,在距离植株30-35厘米处开沟,沟深20-25厘米,向沟内追施有机肥,施肥后覆盖沙土6-8cm,每亩追施有机肥40-50kg;在生长期,要根据苗株情况及时开沟排水、扯藤除杂;
9.s4、荻笋采收:定植当年不进行采摘,第二年3月上旬使用采收装置对生长旺盛、底径1.5cm以上的荻笋进行采收。
10.本发明的进一步设置为:所述有机肥包括腐熟农家肥300~350份、草木灰30-35份、秸秆粉30~40份、腐殖质10~15份和菜籽饼粕30~35份。
11.本发明的进一步设置为:所述荻笋的种植密度控制在每亩2000-2500株。
12.通过上述技术方案,选择适合的江湖洲滩集中化种植荻笋,并通过施加有机肥以及及时进行开沟排水、扯藤除杂等田间管理,可以有效的提高土壤的肥力,有效的提供荻笋生长所需要的营养,提高荻笋的产量。
13.一种荻笋的采收装置,包括第一限位板、沿与所述第一限位板垂直的方向设置于所述第一限位板上的第一夹持板以及沿与所述第一限位板垂直的方向转动设置于所述第一限位板底部的转动杆,所述转动杆上设置有夹持块,所述夹持块包括圆弧形的第一弹性夹持部以及平板状的第二弹性夹持部,所述第一弹性夹持部的圆心角大于180
°
,所述转动
杆上设置有第一转动齿轮,所述第一限位板上设置有与所述第一转动齿轮相啮合的第二转动齿轮,第一限位板上沿竖直方向滑动设置有推拉块,所述推拉块的一侧设置有与所述第二转动齿轮相啮合的第一移动齿条,所述第一夹持板靠近所述夹持块的一侧沿竖直方向滑动设置有第二夹持板,所述第二弹性夹持部所处的平面平行于所述第二夹持板所处的平面,所述推拉块的顶端设置有提拉手环,所述第一弹性夹持部与所述第二夹持板之间可形成夹持间隙。
14.通过上述技术方案,在需要对荻笋进行采收时,将第二限位板对准一排种植的多个荻笋,向下放置第一限位板,使得荻笋位于第二限位板与第一弹性夹持部之间,之后向上拉动提拉手环,带动推拉块和第一移动齿条上升,进而带动第二转动齿轮逆时针转动,第一转动齿轮顺时针转动,在第二转动齿轮转动过程中,第一弹性夹持部抵触于荻笋,将荻笋夹紧在第二夹持板上,同时带动荻笋和第二夹持板向上移动,从而将荻笋从沙土中拔出来,同时通过夹持块与第二限位板之间的距离的设置,使得第一夹持部能够夹紧底径1.5cm以上的荻笋,对于底径小于1.5cm的荻笋无法夹紧拔出,这种方式既保证了采摘荻笋的质量,又保持了荻笋后续正常生长势头,可避免因过度采摘引发的逐步退化;通过设置夹持块、第一限位板以及第二限位板等,工人只需要向上拉动提拉手环就可以夹紧荻笋,并将荻笋从沙土中拔出,不需要弯腰一个个拔出荻笋,大大降低了采收的劳动强度,提高了采收速度。
15.本发明的进一步设置为:所述第一限位板远离所述夹持块的一侧设置有顶部开口的接料框,所述第一限位板靠近所述第一夹持板的一侧开设有与所述接料框连通的进料口,第一限位板上沿水平方向滑动设置有第二限位板,所述第二限位板上沿水平方向设置有与所述第一转动齿轮的顶端相啮合的第二移动齿条,当所述第二弹性夹持部平行于所述第二夹持板时,所述第二限位板的一侧抵触于所述第一夹持板,所述第一夹持板上倾斜设置有导料板,所述导料板位于所述第二夹持板与所述第二限位板之间。
16.通过上述技术方案,在向上拉动提拉手环的过程中,第一移动齿条带动第一转动齿轮和第二转动齿轮转动,第一转动齿轮转动的同时带动第二移动齿条,使得第二限位板沿远离第一夹持板的方向移动,从而使得进料口打开,之后向下倾斜第一限位板,当第一移动齿条带动第一转动齿轮和第二转动齿轮转动一圈时,第二弹性夹持部对准第二限位板,荻笋失去第一弹性夹持部的夹持作用力,在重力作用下从进料口向下掉落进入接料框中,之后向下推动提拉手环,使得夹持块反向转动一圈进行复位;通过设置第二限位板、进料口以及第二移动齿条,在推拉块带动夹持块转动过程中同时带动第二限位板移动,使得进料口打开,之后倾斜接料框,在荻笋与第一弹性夹持部分离后,能够自动掉入接料框内,从而完成整个荻笋的采收过程,提高采收效率。
17.本发明的进一步设置为:所述接料框的内部沿竖直方向滑动设置有若干个接料板,所述接料板的底面可抵触于所述接料框的内壁,所述接料框远离所述第一限位板的一侧沿竖直方向开设有长条形的移动孔,所述接料板上设置有活动穿过所述移动块的固定块,所述固定块上螺纹连接有固定杆,所述接料框上沿竖直方向均匀开设有若干个可与所述固定杆螺纹连接的连接孔。
18.通过上述技术方案,由于荻笋的长度在30cm左右,而接料框的高度在120cm左右,因此当接料框内的荻笋装满后,接料框的上部仍有较大的空间,此时可以向上推动与荻笋直接接触的一个接料板,直至接料板带动荻笋移动至接料框的上部,然后转动固定杆,使得
固定杆与接料框上的合适的连接孔螺纹连接,此时接料框的底部为空闲的状态,可以继续对荻笋进行采收装载;通过设置多个接料板以及固定杆等,实现对接料框的充分利用,提高对荻笋的装载量。
19.本发明的进一步设置为:所述第一弹性夹持部靠近所述第二弹性夹持部的一端斜向上设置有推料板,所述推料板位于所述第一弹性夹持部与所述第二夹持板之间,当所述第二弹性夹持部转动至朝下时,所述推料板位于所述第一弹性夹持部与所述第二夹持板之间。
20.通过上述技术方案,设置推料板,当第二弹性夹持部转动至朝下时,推料板位于第一弹性夹持部与第二夹持板之间,之后当第一弹性部转动至与荻笋分离之后,荻笋的底端抵触于推料板,接料框此时向下倾斜,因此荻笋在重力作用下会从进料口掉入接料框内,避免荻笋从第二弹性接料部与第二限位板之间掉落至地上。
21.本发明的进一步设置为:第一限位板的底端对称设置有倒锥形的定位杆。
22.通过上述技术方案,在对荻笋进行采收时,将第二夹持板对准荻笋之后,向下放置第一限位板,使得定位杆插入沙土内,使得推动夹持块转动对荻笋进行夹持拔出的过程更加稳定。
23.本发明的进一步设置为:所述接料框的一侧铰接设置有出料板,所述接料框上设置有l型的卡块,所述出料板上转动设置有可卡接于所述卡块的卡杆。
24.通过上述技术方案,在接料框内荻笋装满后,转动卡杆,打开出料板,转移出接料框内的荻笋。
25.与现有技术相比,本发明的有益效果在于:
26.1、通过设置夹持块、第一限位板以及第二限位板等,工人只需要向上拉动提拉手环就可以夹紧荻笋,并将荻笋从沙土中拔出,不需要弯腰一个个拔出荻笋,大大降低了采收的劳动强度,提高了采收速度。
27.2、通过夹持块与第二限位板之间的距离的设置,使得第一夹持部能够夹紧底径1.5cm以上的荻笋,对于底径小于1.5cm的荻笋无法夹紧拔出,这种方式既保证了采摘荻笋的质量,又保持了荻笋后续正常生长势头,可避免因过度采摘引发的逐步退化。
附图说明
28.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
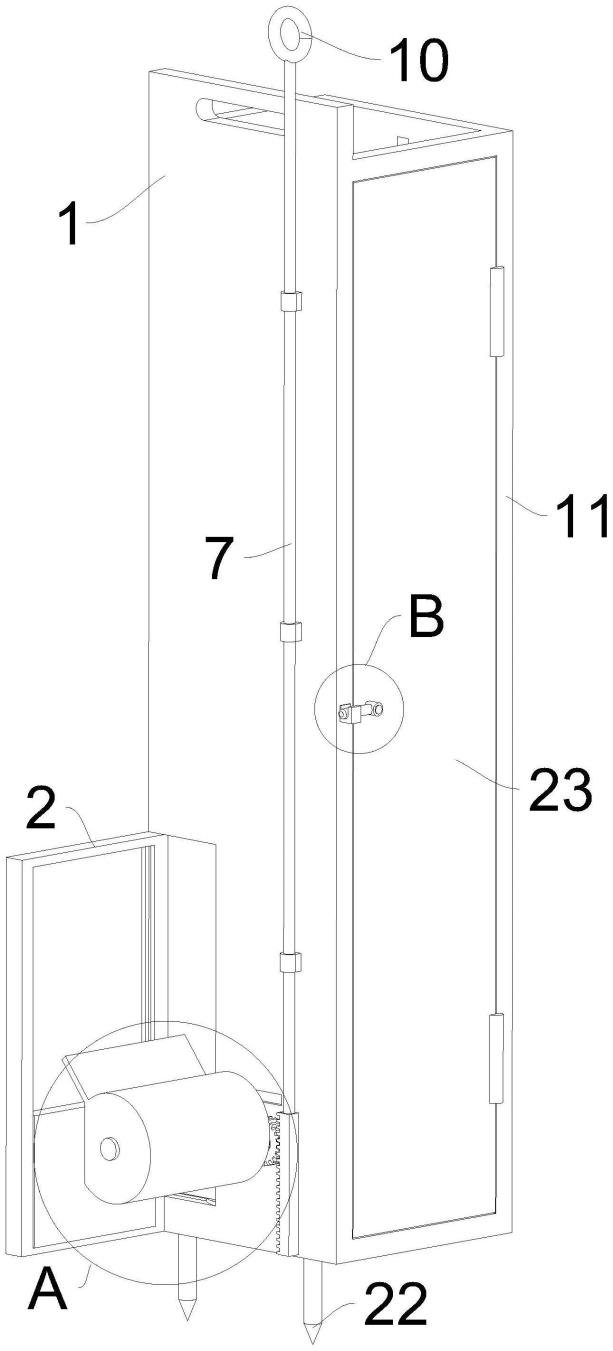
29.图1是本发明一种荻笋种植方法及其采收装置一实施例的结构示意图;
30.图2是图1中a的放大示意图;
31.图3是图1中b的放大示意图;
32.图4是本发明一种荻笋种植方法及其采收装置一实施例的剖面结构示意图;
33.图5是图4中c的放大示意图;
34.图6是本发明一种荻笋种植方法及其采收装置一实施例的剖面结构示意图;
35.图7是图6中d的放大示意图;
36.图8是本发明一种荻笋种植方法及其采收装置一实施例的剖面结构示意图。
37.图中,1、第一限位板;2、第一夹持板;3、转动杆;4、夹持块;;41、第一弹性夹持部;42、第二弹性夹持部;5、第一转动齿轮;6、第二转动齿轮;7、推拉块;8、第一移动齿条;9、第二夹持板;10、提拉手环;11、接料框;12、进料口;13、第二限位板;14、第二移动齿条;15、导料板;16、接料板;17、移动孔;18、固定块;19、固定杆;20、连接孔;21、推料板;22、定位杆;23、出料板;24、卡块;25、卡杆。
具体实施方式
38.下面将结合附图以及具体实施例对本发明的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.本发明提供的一种荻笋种植方法,包括如下步骤:
40.s1、种植地整理:选择土地肥沃、水量充沛、排灌方便的江湖洲滩作为种植地,将地表深翻20-30cm;同时将种植地中的杂草和板结的土块清除干净,每亩土地均匀深埋有机肥1000-1500kg,晾晒2-3天;
41.s2、密植栽培:按0.8-1.0m行距开沟定植,株距25-30cm;
42.s3、田间管理:种植25-30天后,在距离植株30-35厘米处开沟,沟深20-25厘米,向沟内追施有机肥,施肥后覆盖沙土6-8cm,每亩追施有机肥40-50kg;在生长期,要根据苗株情况及时开沟排水、扯藤除杂;
43.s4、荻笋采收:定植当年不进行采摘,第二年3月上旬使用采收装置对生长旺盛、底径1.5cm以上的荻笋进行采收。
44.所述有机肥包括腐熟农家肥300~350份、草木灰30-35份、秸秆粉30~40份、腐殖质10~15份和菜籽饼粕30~35份。
45.所述荻笋的种植密度控制在每亩2000-2500株。
46.一种荻笋的采收装置,包括第一限位板1、沿与所述第一限位板1垂直的方向设置于所述第一限位板1上的第一夹持板2以及沿与所述第一限位板1垂直的方向转动设置于所述第一限位板1底部的转动杆3,所述转动杆3上设置有夹持块4,所述夹持块4包括圆弧形的第一弹性夹持部41以及平板状的第二弹性夹持部42,所述第一弹性夹持部41的圆心角大于180
°
,所述转动杆3上设置有第一转动齿轮5,所述第一限位板1上设置有与所述第一转动齿轮5相啮合的第二转动齿轮6,第一限位板1上沿竖直方向滑动设置有推拉块7,所述推拉块7的一侧设置有与所述第二转动齿轮6相啮合的第一移动齿条8,所述第一夹持板2靠近所述夹持块4的一侧沿竖直方向滑动设置有第二夹持板9,所述第二弹性夹持部42所处的平面平行于所述第二夹持板9所处的平面,所述推拉块7的顶端设置有提拉手环10,所述第一弹性夹持部41与所述第二夹持板9之间可形成夹持间隙。
47.本发明的进一步设置为:所述第一限位板1远离所述夹持块4的一侧设置有顶部开口的接料框11,所述第一限位板1靠近所述第一夹持板2的一侧开设有与所述接料框11连通的进料口12,第一限位板1上沿水平方向滑动设置有第二限位板13,所述第二限位板13上沿水平方向设置有与所述第一转动齿轮5的顶端相啮合的第二移动齿条14,当所述第二弹性
夹持部42平行于所述第二夹持板9时,所述第二限位板13的一侧抵触于所述第一夹持板2,所述第一夹持板2上倾斜设置有导料板15,所述导料板15位于所述第二夹持板9与所述第二限位板13之间。
48.本发明的进一步设置为:所述接料框11的内部沿竖直方向滑动设置有若干个接料板16,所述接料板16的底面可抵触于所述接料框11的内壁,所述接料框11远离所述第一限位板1的一侧沿竖直方向开设有长条形的移动孔17,所述接料板16上设置有活动穿过所述移动块的固定块18,所述固定块18上螺纹连接有固定杆19,所述接料框11上沿竖直方向均匀开设有若干个可与所述固定杆19螺纹连接的连接孔20。
49.本发明的进一步设置为:所述第一弹性夹持部41靠近所述第二弹性夹持部42的一端斜向上设置有推料板21,所述推料板21位于所述第一弹性夹持部41与所述第二夹持板9之间,当所述第二弹性夹持部42转动至朝下时,所述推料板21位于所述第一弹性夹持部41与所述第二夹持板9之间。
50.本发明的进一步设置为:第一限位板1的底端对称设置有倒锥形的定位杆22。
51.本发明的进一步设置为:所述接料框11的一侧铰接设置有出料板23,所述接料框11上设置有l型的卡块24,所述出料板23上转动设置有可卡接于所述卡块24的卡杆25。
52.使用过程:在需要对荻笋进行采收时,将第二限位板13对准一排种植的多个荻笋,向下放置第一限位板1,使得荻笋位于第二限位板13与第一弹性夹持部41之间,之后向上拉动提拉手环10,带动推拉块7和第一移动齿条8上升,进而带动第二转动齿轮6逆时针转动,第一转动齿轮5顺时针转动,在第一转动齿轮5转动过程中,第一弹性夹持部41抵触于荻笋,将荻笋夹紧在第二夹持板9上,同时带动荻笋和第二夹持板9向上移动,从而将荻笋从沙土中拔出来,并且带动第二移动齿条14,使得第二限位板13沿远离第一夹持板2的方向移动,从而使得进料口12打开,之后向下倾斜第一限位板1,当第一移动齿条8带动第一转动齿轮5和第二转动齿轮6转动一圈时,第二弹性夹持部42对准第二限位板13,荻笋失去第一弹性夹持部41的夹持作用力,荻笋的底端抵触于推料板21,在重力作用下从进料口12向下掉落进入接料框11中,之后向下推动提拉手环10,使得夹持块4反向转动一圈进行复位;当接料框11内的荻笋装满后,接料框11的上部仍有较大的空间时,可以向上推动与荻笋直接接触的一个接料板16,直至接料板16带动荻笋移动至接料框11的上部,然后转动固定杆19,使得固定杆19与接料框11上的合适的连接孔20螺纹连接,此时接料框11的底部为空闲的状态,可以继续对荻笋进行采收装载。
53.需要说明的是,本说明书的附图仅为示意,并不代表实际的产品尺寸比例,本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
54.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1